The acronym “PLL” might seem cryptic at first glance, especially within the dynamic and rapidly evolving world of flight technology. However, understanding its meaning is crucial for anyone delving into the intricacies of navigation, stabilization systems, and the underlying electronics that keep modern aerial vehicles, from sophisticated UAVs to nimble racing drones, aloft and on course. PLL, in this context, stands for Phase-Locked Loop. While its direct application might not be immediately apparent to the casual observer, the PLL is a fundamental building block in the sophisticated electronic circuitry that powers many critical functions within flight technology.
The Phase-Locked Loop: A Core Electronic Concept
At its heart, a Phase-Locked Loop is an electronic control system that generates an output signal whose phase is related to the phase of an input “reference” signal. Its primary function is to maintain this phase relationship, effectively synchronizing the output to the input. Imagine it as a highly sophisticated digital or analog “lock” mechanism for frequencies and phases.
The fundamental components of a typical PLL circuit are:
A Phase Detector (PD)
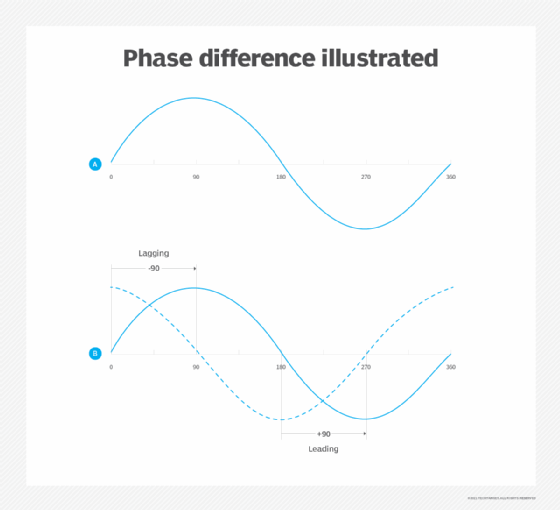
This is where the comparison between the reference signal and the feedback signal (the output signal) occurs. The phase detector generates an output voltage or current that is proportional to the phase difference between these two signals. If the output signal is lagging behind the reference, the detector will produce a signal that tells the system to speed up. Conversely, if the output is ahead, it will signal to slow down.
A Loop Filter (LF)
The output of the phase detector is often a noisy or rapidly fluctuating signal. The loop filter, typically a low-pass filter, smooths out this signal, extracting the average DC component. This filtered signal represents the “error” signal, indicating how far off the output phase is from the desired reference phase. The characteristics of the loop filter are critical in determining the PLL’s performance, affecting its bandwidth, stability, and response time. A wider bandwidth allows for faster tracking of input signal changes but can make the system more susceptible to noise. A narrower bandwidth offers better noise rejection but results in slower tracking.
A Voltage-Controlled Oscillator (VCO)
The VCO is the workhorse of the PLL. It is an oscillator whose output frequency is controlled by an input voltage. The filtered error signal from the loop filter is fed into the VCO. If the error signal indicates the output frequency needs to increase, the VCO’s frequency will rise. If it needs to decrease, the VCO’s frequency will fall. This continuous feedback loop ensures that the VCO’s output frequency and phase will eventually lock onto the reference signal.
A Feedback Path (Divider, Optional)
In some PLL configurations, a frequency divider is placed in the feedback path between the VCO output and the phase detector. This allows the PLL to lock its output frequency to a sub-multiple of the reference frequency, or conversely, to generate a much higher output frequency that is a multiple of the reference. This is incredibly useful for frequency synthesis.
Applications of PLLs in Flight Technology
The fundamental capabilities of a PLL – precise frequency control, signal synchronization, and noise reduction – make it indispensable in a wide array of flight technology applications.
Navigation and Positioning Systems
Modern aerial vehicles rely on incredibly accurate navigation and positioning. This often involves receiving and processing signals from external sources like GPS satellites.
GPS Signal Acquisition and Tracking
GPS receivers must acquire and track weak signals from multiple satellites. PLLs play a critical role in this process. The incoming GPS signals are modulated with specific codes. A PLL within the GPS receiver can be used to lock onto the carrier frequency of the satellite signal. Once locked, another stage of the PLL can then track the pseudorandom noise (PRN) code embedded in the signal. The phase detector compares the incoming code sequence with a locally generated replica, and the loop adjusts the local replica’s timing until it perfectly matches the incoming signal. This precise timing is what allows for accurate distance measurements to satellites, forming the basis of GPS positioning. Without the fine-grained phase and frequency tracking provided by PLLs, acquiring and maintaining lock on these weak, distant satellite signals would be impossible.
Inertial Measurement Units (IMUs) and Sensor Fusion
IMUs, containing accelerometers and gyroscopes, provide crucial data for an aircraft’s attitude and motion. While the raw sensor data is vital, it can be noisy and prone to drift over time. PLLs are often employed in the signal processing chains of IMUs, particularly in the algorithms that fuse data from multiple sensors (like IMUs and GPS) to provide a more robust and accurate state estimation. By locking onto filtered sensor data or using phase information to stabilize signals, PLLs contribute to the overall accuracy and reliability of the navigation solution.
Stabilization and Control Systems
Maintaining stable flight, especially in turbulent conditions or during complex maneuvers, relies heavily on sophisticated control systems. PLLs are integral to the precise timing and signal generation required for these systems.
Gyroscope and Accelerometer Signal Processing
The output signals from gyroscopes and accelerometers are analog and can be susceptible to noise and interference. PLLs can be used in the analog-to-digital conversion (ADC) process or in filtering stages to clean up these signals. By locking onto the true sensor signal and rejecting spurious noise, PLLs ensure that the control system receives accurate information about the aircraft’s orientation and movement. This is paramount for maintaining stability and executing precise commands.
Motor Control and Speed Regulation
For multirotor drones, precisely controlling the speed of each individual motor is fundamental to flight. PLLs can be used in the electronic speed controllers (ESCs) that drive these motors. By locking onto a reference frequency or phase, PLLs ensure that the motor drivers deliver consistent and accurate power, allowing for smooth acceleration, deceleration, and precise adjustments needed for hovering and maneuverability. This level of control is also critical for flight stabilization algorithms, which constantly adjust motor speeds based on sensor feedback.
Communication Systems
Reliable communication between the drone and its ground control station, or between different components within the drone itself, is essential. PLLs are key to the performance of radio frequency (RF) communication systems.
Frequency Synthesis for Radio Transmitters and Receivers
Modern communication systems often require generating highly stable and precise frequencies for both transmitting and receiving signals. PLLs are extensively used in frequency synthesizers. By taking a stable, low-frequency reference crystal oscillator and multiplying its frequency using a PLL, a wide range of precisely controlled output frequencies can be generated. This is vital for tuning receivers to specific channels and for ensuring transmitters operate on allocated frequencies without drifting. This is particularly important in crowded RF environments where multiple drones or communication systems might be operating simultaneously.
Clock Generation and Synchronization
Digital systems within flight technology, from flight controllers to communication modules, rely on precise clock signals to operate correctly. PLLs are commonly used to generate these critical clock signals. They can take a master clock source and, through frequency division and multiplication, generate multiple, synchronized clock signals at different frequencies required by various components. This ensures that all digital operations are synchronized, preventing data corruption and ensuring the seamless operation of complex integrated systems.
Advanced Flight Technologies
As flight technology pushes the boundaries of automation and capability, PLLs continue to play a foundational role in enabling these innovations.
Autonomous Navigation and Pathfinding
While high-level AI algorithms dictate the autonomous path, the underlying hardware and signal processing rely on precise execution. PLLs contribute to the robust signal acquisition and processing needed for GPS, GLONASS, Galileo, and other navigation systems that feed the autonomous flight algorithms. Furthermore, precise timing signals generated by PLLs are essential for the synchronized operation of sensors and actuators that execute the determined flight path.
Obstacle Avoidance Systems
Systems that detect and avoid obstacles often use radar, lidar, or ultrasonic sensors. The signal processing for these sensors, which involves timing pulses and measuring return signals, benefits from the precise timing and signal integrity that PLLs can provide. By ensuring accurate timing of transmitted pulses and precise measurement of received echoes, PLLs contribute to the accuracy and reliability of obstacle detection, a critical safety feature in advanced aerial vehicles.
The Unseen Foundation of Flight
In summary, the Phase-Locked Loop (PLL) is not a component that you’ll find advertised on a spec sheet for a consumer drone, nor is it a feature that directly captures public imagination. However, its role in flight technology is profound and pervasive. From enabling the precise reception of GPS signals that guide a drone across continents to stabilizing its flight path in gusty winds and ensuring crystal-clear communication with the ground, the PLL is an unseen, yet absolutely critical, enabler of modern aerial capabilities. It is a testament to the power of elegant electronic control systems and a fundamental piece of the puzzle that allows these sophisticated machines to navigate, stabilize, and communicate with the reliability we’ve come to expect. Understanding what a PLL is and the fundamental principles behind its operation provides a deeper appreciation for the engineering marvels that are our flying machines.