In the rapidly evolving landscape of drone technology, precision and reliability are paramount. Whether it’s navigating complex urban environments, capturing breathtaking aerial footage, or performing intricate mapping operations, the ability to quantify and understand deviations from expected performance is critical. This is where statistical concepts like Mean Absolute Deviation (MAD) come into play, offering a clear and intuitive measure of variability. While seemingly a purely mathematical concept, understanding MAD provides valuable insight into the robustness and consistency of the systems that power our drones.
Understanding the Fundamentals of Deviation
Before delving into the specifics of Mean Absolute Deviation, it’s essential to grasp the core concept of deviation itself. In the context of drone operation, deviation refers to any instance where a measured value differs from a target or expected value. This could manifest in numerous ways: a slight drift in a drone’s position from its designated GPS waypoint, a variation in sensor readings compared to a calibrated standard, or a fluctuation in the output of a stabilization system. Identifying and quantifying these deviations is the first step towards ensuring predictable and safe drone performance.
The Concept of “Mean”
The “mean,” or average, is a fundamental statistical measure that provides a central tendency of a dataset. It’s calculated by summing all the values in a dataset and then dividing by the number of values. In the context of drone performance, the mean can represent the average position, the average speed, or the average sensor reading over a given period or set of operations. It gives us a baseline against which deviations can be measured.
The Concept of “Absolute”
The term “absolute” in “Mean Absolute Deviation” refers to the absolute value of a deviation. When we calculate the difference between a measured value and the mean, the result can be positive or negative, indicating whether the measured value is above or below the average. By taking the absolute value, we disregard the direction of the deviation and focus solely on its magnitude. This is crucial because we are often interested in the size of the error or variation, regardless of whether it’s an overestimation or underestimation. For example, a drone being 5 meters north of its target and a drone being 5 meters south of its target both represent an equally significant positional deviation of 5 meters.
The Concept of “Deviation” in Practice
Deviation, in its simplest form, is the difference between an individual data point and a reference point. For drone applications, this reference point is often the mean. So, if a drone is supposed to maintain a constant altitude of 100 meters, and its altitude fluctuates between 98 meters and 102 meters, we have deviations of -2 meters and +2 meters. These individual deviations, when analyzed collectively, provide information about the consistency of the drone’s altitude control system.
Calculating and Interpreting Mean Absolute Deviation
Mean Absolute Deviation provides a straightforward way to quantify the average magnitude of deviations within a dataset. It offers a more robust measure of variability than simply looking at the range, especially when dealing with outliers.
The Calculation Process
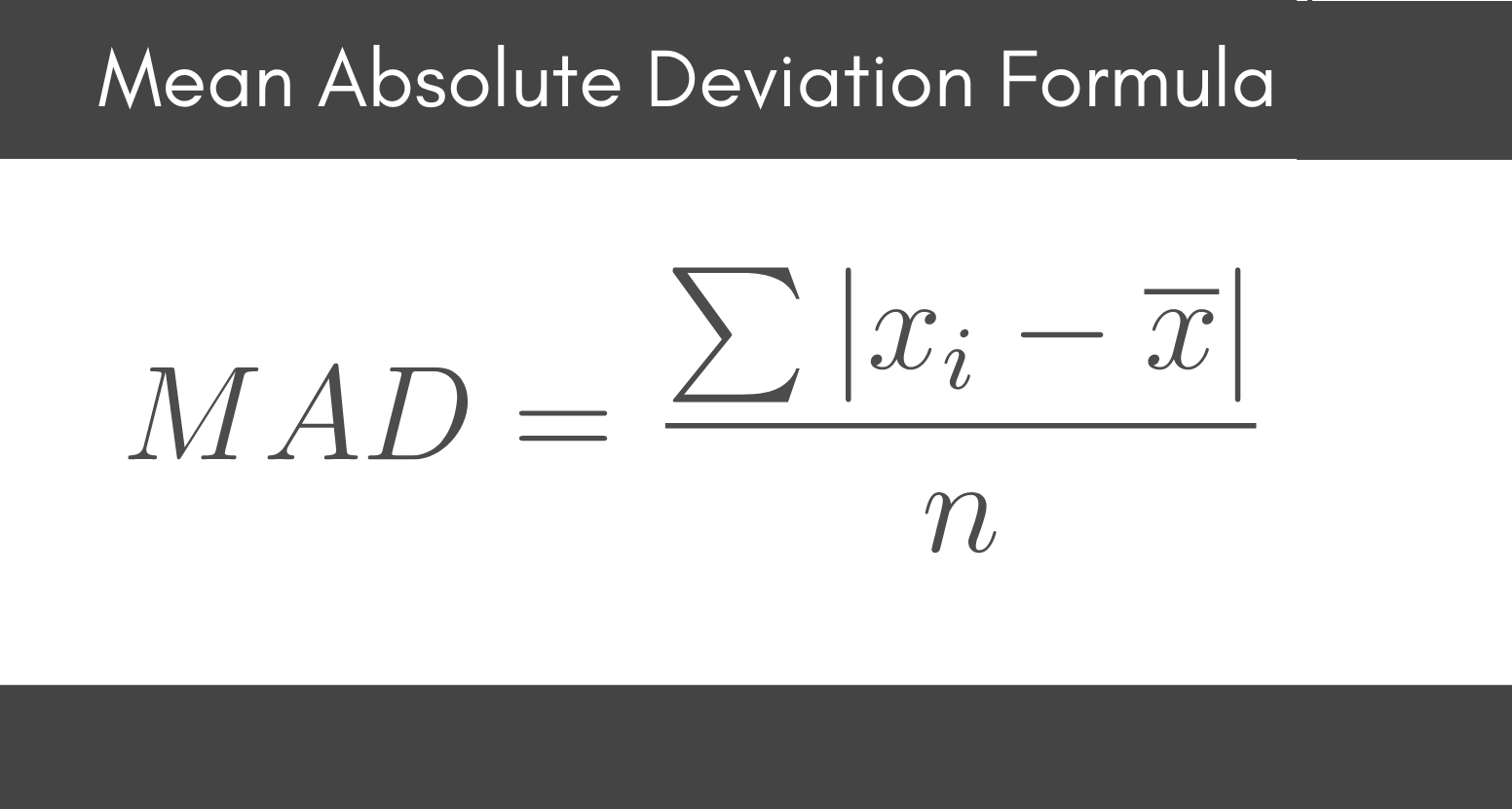
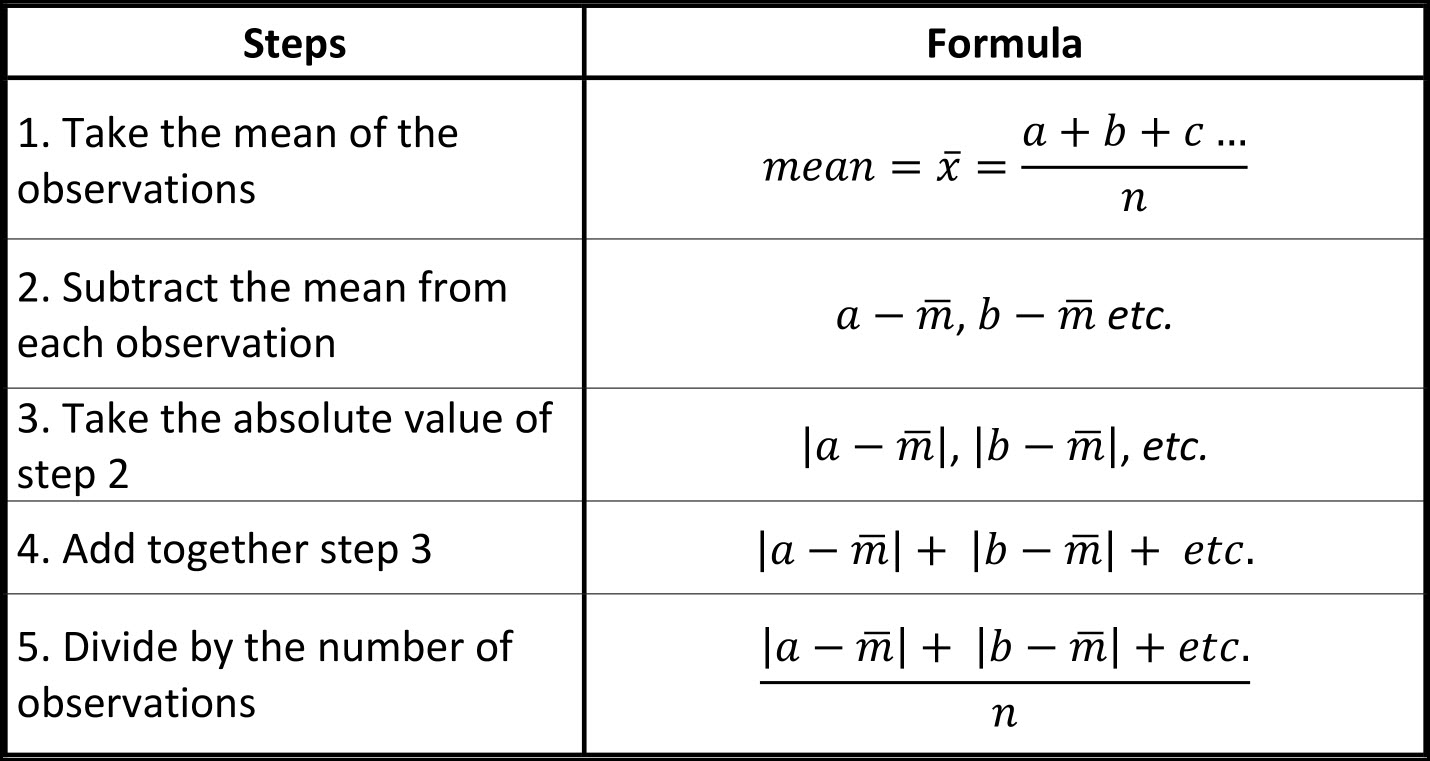
To calculate the Mean Absolute Deviation for a set of data points (e.g., positional errors, sensor readings):
- Calculate the Mean: Sum all the data points and divide by the total number of data points.
- Calculate Deviations: For each data point, subtract the calculated mean.
- Take Absolute Values: Convert each deviation into its absolute value. This means making all negative deviations positive.
- Calculate the Mean of Absolute Deviations: Sum all the absolute deviations and divide by the total number of data points.
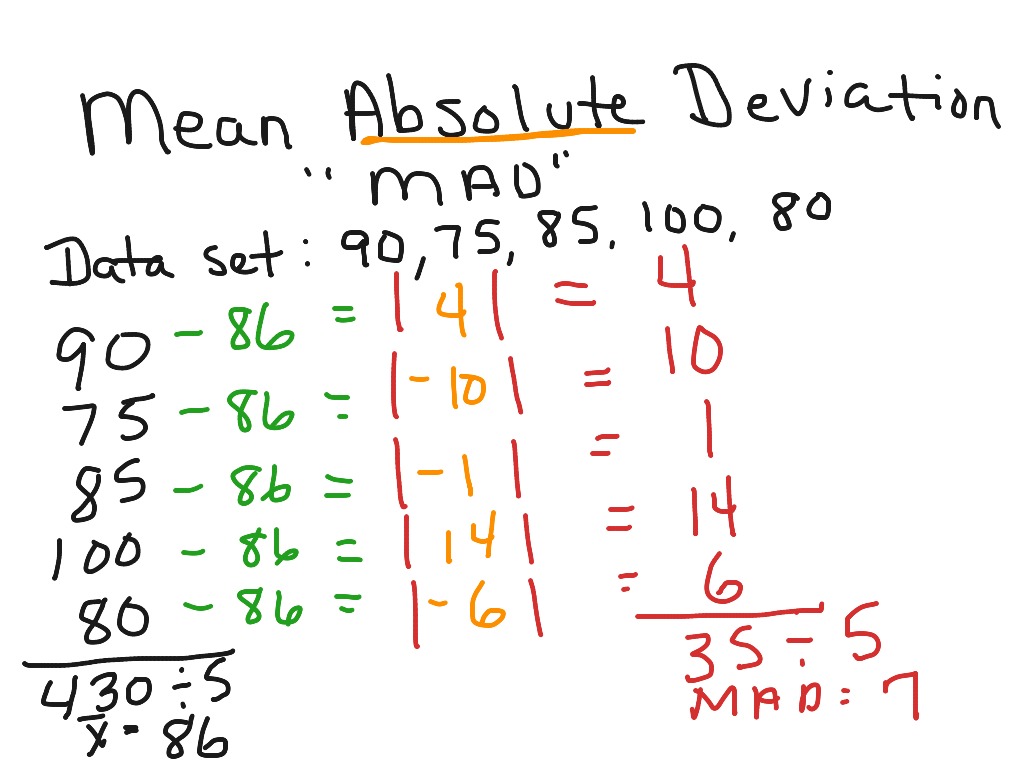
Let’s consider a simplified example: a drone’s altitude readings over a short period were 100m, 102m, 98m, 101m, and 99m.
- Step 1: Calculate the Mean. (100 + 102 + 98 + 101 + 99) / 5 = 500 / 5 = 100m.
- Step 2: Calculate Deviations.
- 100 – 100 = 0m
- 102 – 100 = +2m
- 98 – 100 = -2m
- 101 – 100 = +1m
- 99 – 100 = -1m
- Step 3: Take Absolute Values.
- |0m| = 0m
- |+2m| = 2m
- |-2m| = 2m
- |+1m| = 1m
- |-1m| = 1m
- Step 4: Calculate the Mean of Absolute Deviations. (0 + 2 + 2 + 1 + 1) / 5 = 6 / 5 = 1.2m.
Therefore, the Mean Absolute Deviation of the altitude readings is 1.2 meters. This indicates that, on average, the drone’s altitude readings deviated by 1.2 meters from the mean altitude of 100 meters.
Interpreting the MAD Value
The resulting MAD value is a direct measure of the average spread or dispersion of the data around its mean.
- Low MAD: A low MAD value suggests that the data points are clustered closely around the mean. In drone operations, this signifies high consistency and predictability. For example, a low MAD in positional data would indicate that the drone is staying very close to its intended flight path or hovering position.
- High MAD: A high MAD value indicates that the data points are spread out over a wider range. In drone applications, this could signal variability or instability in the system. A high MAD in sensor readings might suggest a faulty sensor or external interference affecting its accuracy.
MAD vs. Standard Deviation
While both MAD and standard deviation are measures of dispersion, they differ in their calculation and sensitivity to outliers. Standard deviation squares the deviations before averaging, giving more weight to extreme values. MAD, by using absolute values, is less affected by extreme outliers. For many practical drone applications where understanding the typical deviation is more important than heavily penalizing occasional large errors, MAD can be a more intuitive and robust metric.
Applications of Mean Absolute Deviation in Drone Technology
The principles of Mean Absolute Deviation find practical applications across various facets of drone technology, from enhancing navigation accuracy to ensuring reliable sensor performance and optimizing flight control.
Navigation and Positioning Accuracy
Precise navigation is fundamental to drone operations. Whether a drone is autonomously following a pre-programmed route, maintaining a stable hover over a specific point, or performing complex maneuvers, its ability to stay on course is constantly being evaluated.
- GPS Accuracy Assessment: GPS systems, while advanced, are subject to errors due to atmospheric conditions, signal multipath, and satellite geometry. MAD can be used to quantify the average deviation of a drone’s reported GPS position from its actual position or a known ground truth. A lower MAD indicates a more reliable GPS lock and more accurate positioning. This is critical for applications like precision agriculture, surveying, and infrastructure inspection where millimeter-level accuracy can be crucial.
- Waypoint Following Performance: During autonomous flights, drones follow a series of waypoints. MAD can be applied to analyze the deviation from each waypoint. A low MAD for waypoint deviation means the drone is consistently hitting its targets with minimal drift, ensuring the integrity of missions like aerial mapping or delivery routes.
- Hover Stability: For drones tasked with stable hovering for photography, videography, or surveillance, MAD can measure the average positional drift over time. A low MAD here translates to smooth, stable footage and reliable observation capabilities.
Sensor Performance and Reliability
Drones rely on a suite of sensors to perceive their environment, maintain orientation, and execute commands. The accuracy and consistency of these sensors are vital for safe and effective operation.
- IMU (Inertial Measurement Unit) Data Analysis: IMUs, comprising accelerometers and gyroscopes, are crucial for measuring acceleration and angular velocity, which are used for attitude determination and stabilization. MAD can be employed to analyze the consistency of readings from these sensors over time. For instance, a high MAD in gyroscope readings might indicate noise or drift, potentially affecting the drone’s ability to maintain a stable flight attitude, especially in turbulent conditions.
- Barometer and Altimeter Calibration: Barometric altimeters provide altitude readings based on air pressure. Fluctuations in air pressure or sensor drift can lead to inaccurate altitude measurements. MAD can help assess the typical variation in these readings, informing calibration procedures and identifying potential issues that could lead to altitude-related accidents.
- Lidar and Radar Data Consistency: For drones equipped with Lidar or radar for 3D mapping and obstacle avoidance, MAD can be used to evaluate the consistency of range measurements. A low MAD suggests that the sensor is reliably measuring distances, contributing to accurate environmental mapping and preventing collisions.
Flight Control and Stabilization Systems
The sophisticated flight control systems of modern drones are responsible for translating pilot commands and autonomous algorithms into precise motor movements. The effectiveness of these systems is directly related to their ability to minimize deviations from the desired flight state.
- PID Controller Performance Tuning: Proportional-Integral-Derivative (PID) controllers are commonly used in flight control systems to regulate drone behavior. The tuning of PID parameters aims to minimize oscillations and overshoots, which are essentially deviations. While not directly calculating MAD for PID tuning, the underlying principle of minimizing deviations from the setpoint is what the tuning process seeks to achieve. Observing the deviations from the target attitude or position after tuning can be implicitly analyzed through metrics related to dispersion.
- Autopilot Robustness: Autonomous flight systems are designed to execute complex missions with minimal human intervention. The robustness of these systems can be assessed by analyzing the deviations from planned trajectories under various conditions. A low MAD in deviation from planned paths indicates a well-tuned and reliable autopilot capable of handling expected environmental variables.
- Stabilization System Effectiveness: For tasks requiring extreme stability, such as close-up filming of delicate structures or precise aerial surveying, the effectiveness of the stabilization system is paramount. MAD can quantify how much the drone’s attitude (roll, pitch, yaw) deviates from its target orientation over time. A low MAD signifies a highly effective stabilization system that can counteract external disturbances, ensuring smooth and accurate flight.
In conclusion, while the term “Mean Absolute Deviation” might sound abstract, its principles are deeply embedded in the practical realities of drone operation. By providing a clear and interpretable measure of variability, MAD empowers engineers and operators to assess, understand, and ultimately improve the accuracy, reliability, and safety of drone systems, pushing the boundaries of what these remarkable flying machines can achieve.