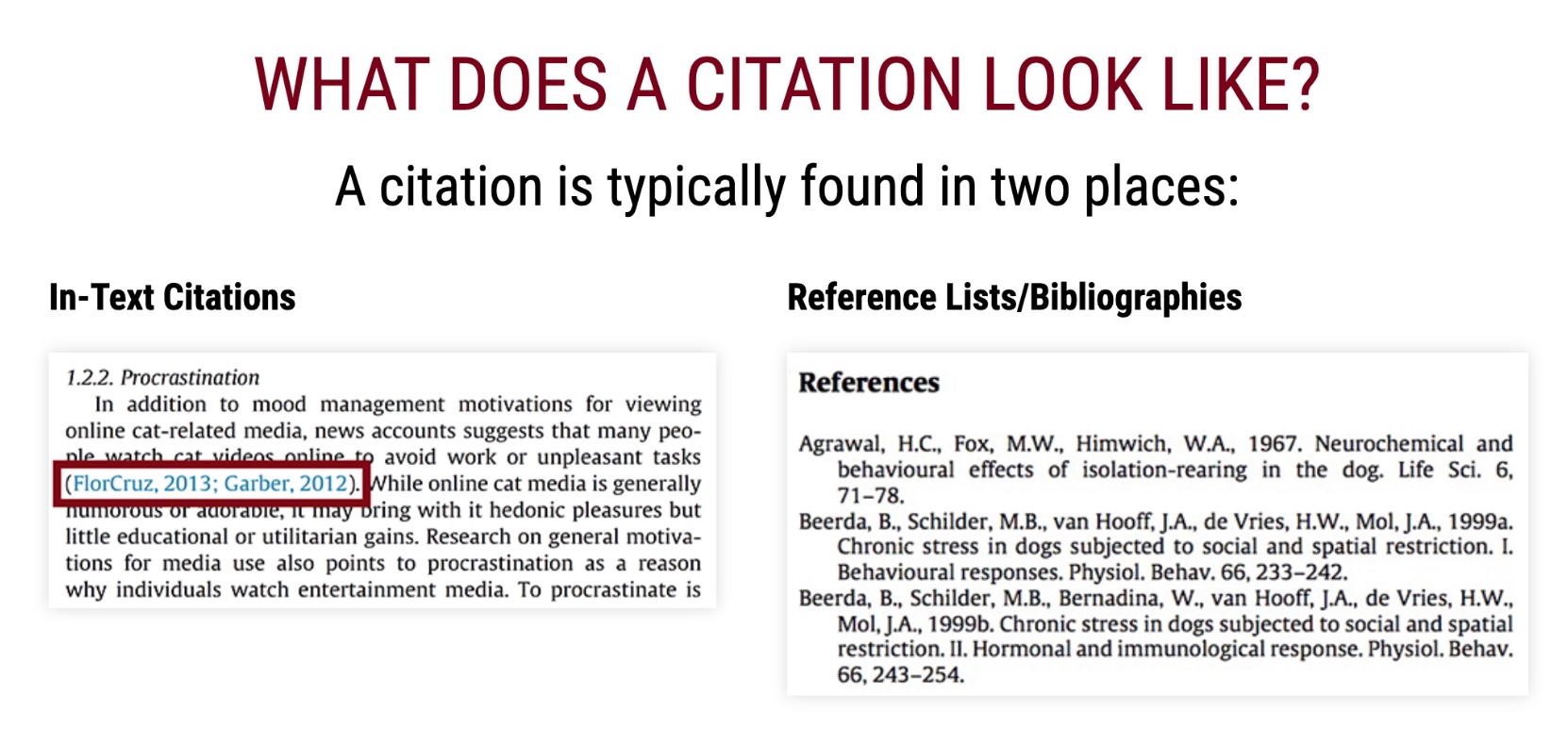
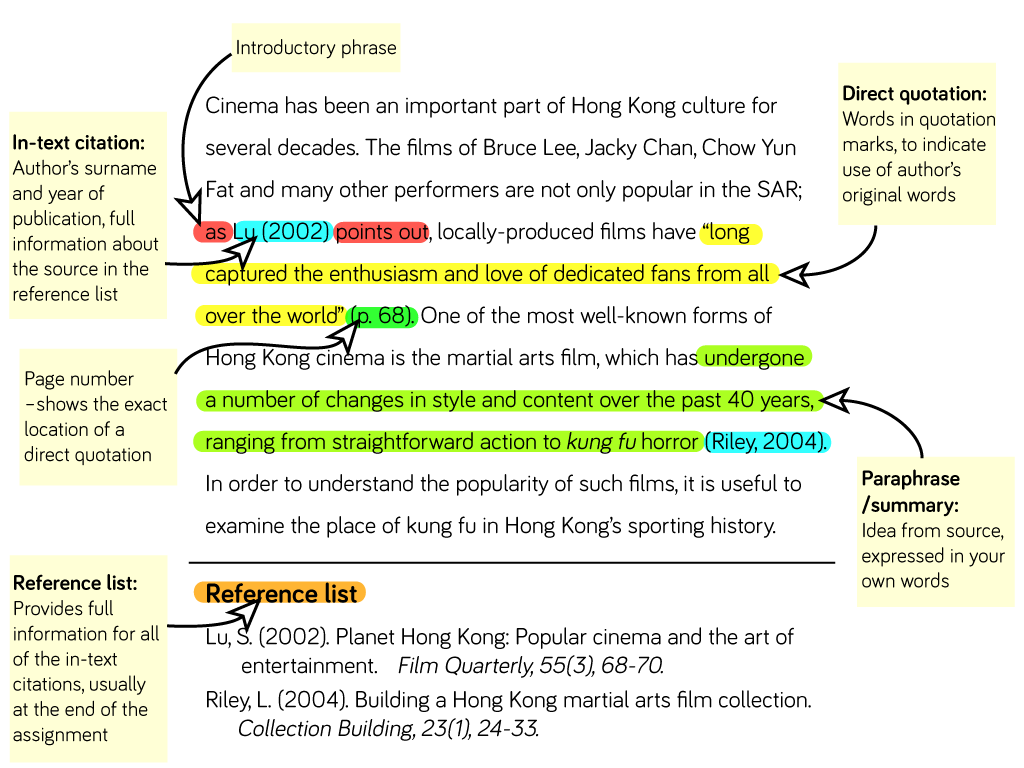
In the rapidly evolving fields of drone technology and innovation, the concept of a “citation” extends far beyond traditional academic referencing. While scholarly articles certainly require formal citations, the drone industry necessitates rigorous documentation and attribution across all facets of its development and application. From detailing hardware specifications to referencing complex algorithms and mapping data, understanding how information is formally presented, recorded, and referenced is crucial for transparency, reproducibility, and progress. This encompasses not just where data comes from, but how technical specifications, flight parameters, regulatory guidelines, and software components are structured and made accessible, forming a robust ecosystem of knowledge attribution within this dynamic sector.
Documenting Drone Specifications and Component References
The foundation of any drone innovation lies in its hardware. Accurately detailing and referencing the components, materials, and performance characteristics is paramount for engineering, manufacturing, and user understanding.
Technical Data Sheets and Manuals
For every drone model, subsystem, or individual component, technical data sheets (TDS) and user manuals serve as primary “citations.” A TDS typically presents a concise, standardized format outlining critical specifications: dimensions, weight, power consumption, operating voltage, sensor types, communication protocols, and environmental limits. For example, a flight controller’s TDS might list its processor, IMU (Inertial Measurement Unit) type, number of motor outputs, and compatible firmwares. These documents are often structured with clear headings, tables, and diagrams, providing an authoritative reference for engineers integrating components or users troubleshooting issues. User manuals expand on this, providing step-by-step instructions for assembly, configuration, operation, and maintenance, often citing specific hardware versions or software requirements. The format is typically highly organized, using numbered steps, safety warnings, and component diagrams to ensure clarity and precision, thereby acting as a comprehensive guide and formal record of the product’s intended use and capabilities.
Open-Source Project Attributions
Many innovations in drone technology, particularly in areas like autonomous flight and custom firmware, leverage open-source projects. When developers incorporate open-source libraries, algorithms, or hardware designs (e.g., ArduPilot, PX4, Betaflight), proper attribution is a critical form of “citation.” This typically involves including licensing information (e.g., MIT, GPL), acknowledging original authors or projects in code comments, README files, or dedicated “About” sections within software. For hardware designs shared under open licenses, referencing the original design files and creators is standard practice. Such attributions ensure legal compliance, foster community collaboration, and allow future developers to trace the lineage of the technology, understand its dependencies, and contribute improvements. These citations often appear as specific file headers, entries in project manifests, or dedicated “LICENSE” or “ATTRIBUTION” files within the project repository.
Citing Flight Data and Sensor Outputs
Drones are prolific data collectors. Properly citing and contextualizing the vast amounts of flight and sensor data they generate is crucial for analysis, application development, and regulatory compliance.
Geospatial Data Formats (e.g., KML, GeoJSON)
When a drone performs a mapping mission, the resulting flight path and captured imagery metadata are often “cited” in standardized geospatial data formats. KML (Keyhole Markup Language) and GeoJSON are common examples. A KML file might contain placemarks for points of interest, lines representing flight paths, and polygons defining survey areas, each with associated descriptive information like timestamps, altitude, and even links to specific images. GeoJSON similarly represents simple geographical features and their non-spatial attributes, making it highly suitable for web applications and data exchange. These formats are inherently self-citing in that they embed the spatial and temporal context of the data directly within their structure, allowing precise geographical referencing of drone operations and the data products derived from them. The structure typically includes coordinates, altitude, timestamps, and often metadata tags about the drone, mission, and sensor.
Sensor Log Standardization
Modern drones are equipped with an array of sensors—GPS, IMU, magnetometers, barometers, and specialized payloads like LiDAR or multispectral cameras. The raw data from these sensors is continuously logged during flight. A “citation” of this data often takes the form of highly structured log files (e.g., .bin files for ArduPilot/PX4, .DAT for DJI). These logs standardize the recording of sensor readings, timestamps, flight modes, control inputs, and system states. Each data point is tagged with its origin (e.g., “GPS_RAW,” “ACCEL”), providing a clear reference to the specific sensor and its output. The standardization of these log formats ensures that researchers, developers, and incident investigators can reliably parse, analyze, and reproduce flight conditions or sensor performance, making these logs critical “citations” of the drone’s operational history and sensory perception.
Flight Performance Metrics
Beyond raw logs, aggregated flight performance metrics also serve as critical “citations” for drone innovation. This includes metrics like flight duration, average speed, max altitude, battery consumption rates, wind resistance, and payload capacity. When comparing different drone designs, evaluating new components, or assessing the impact of software updates, these quantified metrics are formally presented in reports, dashboards, or technical comparisons. The “citation” involves not just stating the metric, but often detailing the methodology of measurement, the specific drone configuration used, and the environmental conditions under which the data was collected. This allows for valid comparisons and benchmarks across different innovations and ensures that performance claims are substantiated with reproducible data.
Referencing Research and Regulatory Standards
The advancement of drone technology is heavily influenced by academic research and guided by an increasingly complex web of regulations. Proper referencing in these areas is crucial for establishing credibility, ensuring safety, and fostering responsible innovation.
Academic Papers and Conference Proceedings
As with any scientific and engineering discipline, academic research forms the bedrock of many drone innovations, particularly in areas like AI-driven navigation, swarm intelligence, and advanced control systems. When developing new algorithms or reporting on experimental results, engineers and researchers “cite” peer-reviewed academic papers, conference proceedings, and technical reports. These citations follow established academic styles (e.g., IEEE, APA) and appear in bibliographies or reference lists. Within the body of text, specific claims or methodologies are linked to their original sources, allowing readers to delve deeper into the theoretical underpinnings or empirical evidence supporting the work. This practice ensures intellectual honesty, validates methodologies, and contributes to the cumulative knowledge base of drone technology.

Industry Standards and Best Practices
To ensure interoperability, safety, and reliability, the drone industry relies on various standards and best practices established by organizations like ASTM International, ISO, and RTCA. When designing new drones, developing flight control systems, or implementing new operational procedures, adherence to these standards is a critical “citation.” This involves explicitly referencing the relevant standard document (e.g., “ASTM F38.02 Standard Specification for Small Unmanned Aircraft System”) in design documents, operational manuals, and compliance reports. Adherence to these standards indicates a commitment to quality and safety, and citing them provides formal proof of this commitment, guiding developers and operators in safe and effective deployment. These references might appear in a dedicated compliance matrix or as direct mentions in system design specifications.
Regulatory Compliance Documents
The operation of drones is subject to strict national and international regulations. Innovators must “cite” and demonstrate compliance with these legal frameworks. This includes referencing specific sections of aviation authority regulations (e.g., FAA Part 107 in the US, EASA regulations in Europe) when developing operational manuals, submitting flight plans, or applying for special waivers or certifications for autonomous flight or beyond visual line of sight (BVLOS) operations. A regulatory “citation” often takes the form of a detailed compliance matrix or a narrative within an operational safety case, demonstrating how a particular drone system or operational procedure meets each legal requirement. This systematic referencing is essential for obtaining operational approvals and ensuring the lawful deployment of new drone technologies.
Data Citations in Mapping and Remote Sensing
Drone-based mapping and remote sensing generate vast datasets. The reliability and utility of these outputs hinge on transparent “citation” of their origins and processing.
Orthomosaic and 3D Model Metadata
When drones are used to create orthomosaic maps or 3D models of terrain and structures, the resulting data products inherently contain “citations” through their metadata. This metadata typically includes information about the drone used, the camera sensor, flight altitude, ground sample distance (GSD), date and time of acquisition, processing software used, and the coordinate system of the output. Often embedded within the file (e.g., EXIF data for images, GeoTIFF headers, or metadata files accompanying 3D models in formats like OBJ or LAS), this information provides critical context. It allows users to verify the data’s quality, understand its limitations, and determine its suitability for specific applications. Without this metadata, the derived products would lose much of their scientific and practical value, making these embedded data points essential citations.
Remote Sensing Data Provenance
In advanced remote sensing applications, tracking the “provenance” of data is a form of citation. This involves meticulously recording the entire data lifecycle: from the specific drone platform and payload configuration, to the calibration procedures applied to sensors, environmental conditions during data capture, pre-processing steps, and subsequent analytical methodologies. For instance, a multispectral agricultural survey might cite the specific spectral bands used, the calibration against a reference panel, the atmospheric correction model applied, and the vegetation index calculation method. This comprehensive provenance trail serves as a robust citation, allowing researchers to replicate studies, assess data integrity, and ensure that remote sensing outputs are scientifically sound and traceable. It ensures that the interpretation of the data is grounded in a verifiable methodology.
Environmental Monitoring Reports
Drones are increasingly deployed for environmental monitoring, collecting data on everything from wildlife populations to pollution levels. Reports generated from such missions contain critical “citations” regarding data sources and methodologies. These reports will explicitly reference the drone model, sensor types, flight parameters, and the specific algorithms or models used for data analysis (e.g., object detection algorithms for wildlife counting, spectral analysis techniques for water quality assessment). Furthermore, they will cite baseline environmental data, historical records, and any ground-truthing efforts that validate the drone-collected information. Such rigorous citations lend scientific credibility to the findings, enabling policymakers and conservationists to make informed decisions based on verifiable and reproducible data.
Attributing AI Models and Autonomous Flight Algorithms
Artificial intelligence and autonomous flight are at the forefront of drone innovation. “Citing” the components of these complex systems is fundamental for development, auditing, and ensuring ethical deployment.
Algorithm Source Code and Libraries
The algorithms powering AI follow modes, autonomous navigation, and intelligent decision-making are often built upon foundational academic research and open-source libraries. When developing custom AI models or autonomous flight controllers, explicit “citations” to the original source code, algorithms, and libraries used are crucial. This includes specifying the version of TensorFlow or PyTorch, the specific implementation of a SLAM (Simultaneous Localization and Mapping) algorithm, or the PID (Proportional-Integral-Derivative) controller tuning methodology. These citations are typically found within the source code comments, README files, or dedicated documentation, providing a traceable lineage for the software components. They enable other developers to understand the intellectual basis of the system, verify its components, and contribute to its improvement or debug potential issues.
Training Data Sets and Benchmarks
The performance of AI models is heavily dependent on the data they are trained on. Therefore, formally “citing” the training data sets used is a critical form of attribution in drone AI development. This involves detailing the origin of the data (e.g., publicly available datasets like ImageNet, custom collected drone footage), its size, diversity, and any augmentation techniques applied. For instance, an object detection model for drone delivery might cite a dataset of aerial images of various landing zones, explicitly mentioning the number of images, resolution, and annotation methodology. Similarly, when benchmarking an AI model’s performance against industry standards or other models, the specific benchmark datasets and metrics used (e.g., accuracy, precision, recall) are cited to ensure reproducible and comparable results. This transparency is vital for understanding model biases, limitations, and generalizability, particularly in safety-critical autonomous drone operations.
Performance Metrics and Validation Reports
When an autonomous drone system is developed, its performance is rigorously tested and validated. The “citations” in this context take the form of detailed performance metrics and validation reports. These documents precisely outline the test scenarios, environmental conditions, the specific metrics measured (e.g., navigation accuracy, obstacle avoidance success rate, latency), and the statistical methods used to analyze the results. For example, a validation report for an autonomous inspection drone might cite its ability to maintain a consistent standoff distance from a structure under varying wind conditions, supported by statistical analysis of multiple flight tests. These formal reports, with their precise metrics and methodologies, serve as authoritative citations of the system’s capabilities and limitations, providing crucial evidence for regulatory approval, client acceptance, and further developmental iterations.