The Evolution of Web Communication for Real-time Drone Operations
Web-based communication has undergone significant transformations, driven by the escalating demand for dynamic, real-time interactions across various domains, including the rapidly expanding field of unmanned aerial vehicles (UAVs). Early internet protocols, primarily HTTP, laid the foundation for information exchange, but their stateless, request-response model proved inherently inefficient for applications requiring continuous, bidirectional data flow. In the context of drone technology, where milliseconds can dictate the success of a mission or the safety of an operation, these limitations became glaringly apparent. The intricate dance of aerial robotics, from precise navigation and sensor data acquisition to autonomous decision-making and real-time remote control, necessitates a communication paradigm far more sophisticated than what traditional web protocols initially offered.
The Limitations of Traditional HTTP
Hypertext Transfer Protocol (HTTP), the backbone of the internet, functions on a client-pull model. A client sends a request to a server, and the server responds. Once the response is delivered, the connection is typically closed, or held briefly for subsequent requests. For a drone transmitting continuous telemetry data, or a ground control station needing to issue immediate commands, this model creates significant overhead. To simulate real-time interaction, developers had to resort to techniques like “polling,” where the client repeatedly sends requests to the server, asking for new data. This constant querying consumes bandwidth, increases latency due to the repeated establishment and tear-down of connections, and places a substantial load on both the client (e.g., a drone’s onboard computer or a GCS application) and the server infrastructure.
Imagine a drone executing an autonomous flight path, continuously sending its GPS coordinates, altitude, battery status, and sensor readings back to a ground control station. If this data stream relies on HTTP polling, the GCS would have to repeatedly ask the drone for updates. Each request would incur connection setup time, header overhead, and the latency inherent in waiting for the next polling interval. Conversely, if the GCS needs to send an emergency “return to home” command, the drone might only receive it after its next scheduled poll. Such delays are unacceptable in critical drone operations, where instantaneous response is paramount for safety, precision, and mission efficacy. The need for a more efficient, persistent, and truly interactive communication channel became a critical bottleneck for advancing real-time drone capabilities.
The Need for Persistent Connections in Drone Tech
The sophisticated nature of modern drone operations demands communication channels that mirror human-like interaction: fluid, continuous, and responsive. Consider scenarios like live streaming high-definition video from a drone for inspection, real-time adjustments to an autonomous flight plan based on changing environmental conditions, or the synchronized movements of a drone swarm. These applications cannot tolerate the inherent latency and overhead of traditional HTTP. They require a mechanism for both the drone and the ground station (or cloud service) to push data to each other whenever new information is available, without the need for constant, explicit requests. This is where the concept of a persistent, bidirectional connection becomes not just an advantage, but a fundamental requirement for pushing the boundaries of drone technology and innovation. A continuous data pipeline ensures that critical information, whether it’s a sudden gust of wind detected by the drone’s sensors or a critical command from a remote operator, is transmitted and received with minimal delay, enabling immediate action and fostering a more robust, responsive, and safer drone ecosystem.
WebSockets: Enabling Real-time Intelligence and Control in UAVs
WebSockets emerged as a groundbreaking protocol designed to address the limitations of traditional HTTP for real-time web applications. Specifically tailored for scenarios demanding low-latency, high-throughput, and bidirectional communication, WebSockets offer a persistent connection between a client and a server, enabling a true “push” model of data exchange. For drone technology, this shift from a conversational, request-response dialogue to a continuous, open channel represents a paradigm leap in how UAVs communicate with their operators, other drones, and cloud-based intelligence systems.
How WebSockets Establish Bidirectional Communication
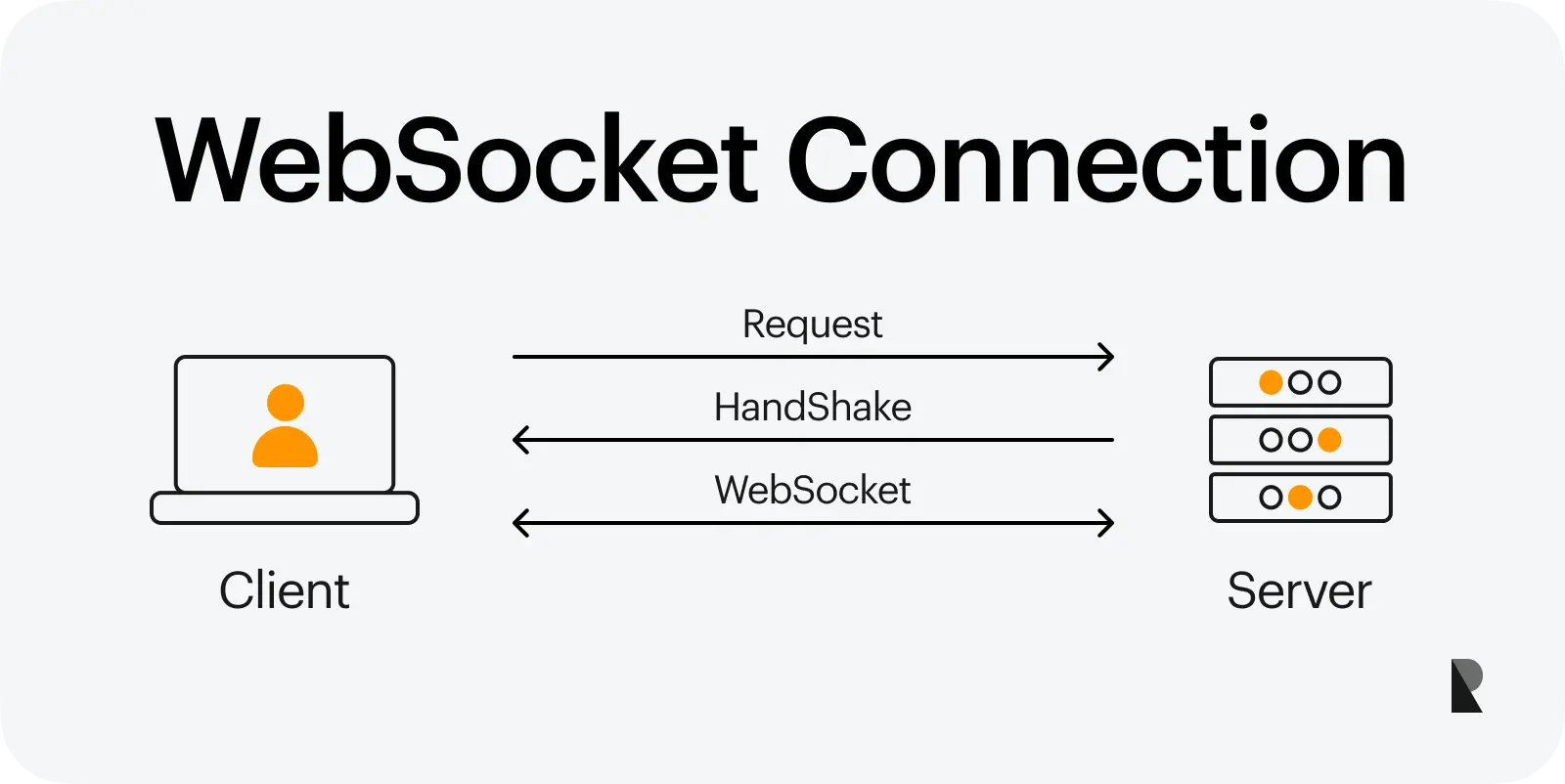
The establishment of a WebSocket connection begins with a standard HTTP request, known as the “WebSocket handshake.” A client (e.g., a drone’s onboard application or a web-based ground control interface) sends an HTTP request to the server with a special “Upgrade” header. This header signals to the server the client’s intention to switch from HTTP to the WebSocket protocol. If the server supports WebSockets, it responds with an HTTP status code 101 Switching Protocols, completing the handshake. Once this handshake is successful, the connection “upgrades” from HTTP to a full-duplex WebSocket connection.
From this point onwards, the underlying TCP connection remains open. Both the client and the server can send data to each other at any time, independently of one another, without the overhead of HTTP headers or the need to re-establish a connection for each message. This persistent, open channel allows for real-time, event-driven communication. For a drone, this means it can continuously stream telemetry data, sensor readings, and video frames to a ground station or cloud service, while simultaneously receiving commands, mission updates, or parameter changes from the ground, all over the same efficient connection. This simultaneous input and output capability is what makes WebSockets so powerful for interactive and autonomous drone applications.
Key Benefits for Drone Systems
The advantages of WebSockets for drone systems are manifold, directly impacting performance, efficiency, and the scope of innovative applications:
- Reduced Latency: By eliminating the overhead of repeated HTTP requests and connection establishments, WebSockets significantly reduce latency. This is crucial for real-time control, emergency response, and dynamic mission adjustments where even slight delays can have critical consequences.
- Full-Duplex Communication: The bidirectional nature allows both the drone and its counterpart (GCS, cloud, other drones) to send and receive data concurrently. This is essential for interactive experiences, simultaneous telemetry streaming and command issuance, and complex cooperative behaviors.
- Efficiency and Bandwidth Saving: Once established, WebSocket connections use minimal overhead. Messages are framed simply, resulting in less data transmission per message compared to HTTP requests, which carry extensive headers. This conserves precious bandwidth, particularly important for drones operating with limited wireless spectrum or remote connectivity.
- Persistent Connection: The “always-on” nature ensures that the communication channel is ready for immediate data exchange, eliminating the need to wait for a polling interval or establish a new connection. This reliability is vital for maintaining constant situational awareness and control.
- Simplified Architecture: For developers, WebSockets offer a more straightforward model for real-time applications compared to complex polling or long-polling solutions, leading to cleaner code and easier maintenance for drone control software and services.
These benefits collectively empower a new generation of drone applications, moving beyond simple remote control to truly intelligent, autonomous, and interconnected systems.
Practical Applications of WebSockets in Drone Tech & Innovation
The inherent capabilities of WebSockets make them an ideal candidate for driving innovation across numerous facets of drone technology. Their ability to facilitate seamless, real-time data exchange is pivotal for evolving drones from mere flying cameras into sophisticated, intelligent, and interconnected autonomous platforms.
Real-time Telemetry and Ground Control Stations (GCS)
Perhaps the most fundamental application of WebSockets in drone technology lies in enhancing the communication between drones and their Ground Control Stations (GCS). A drone in flight generates a continuous stream of telemetry data: GPS coordinates, altitude, heading, airspeed, battery level, motor RPMs, sensor readings (e.g., IMU data, barometer, magnetometers), and flight mode status. For a GCS operator to maintain full situational awareness and make informed decisions, this data must be presented in real-time.

With WebSockets, the drone can establish a persistent connection to the GCS (which might be a web application running in a browser or a dedicated desktop application with WebSocket client capabilities). The drone then continuously pushes its telemetry stream to the GCS without the need for the GCS to constantly request updates. This ensures minimal latency for critical data, allowing the operator to react instantly to changes in flight conditions, identify potential issues, or verify autonomous flight progress. Simultaneously, the GCS can use the same WebSocket connection to send commands, update mission waypoints, adjust flight parameters, or initiate emergency procedures directly to the drone, fostering a highly responsive and intuitive control experience. This low-latency, bidirectional flow is critical for precision agriculture drones, industrial inspection UAVs, and search-and-rescue operations where every second counts.
Cloud Integration and AI-Powered Drone Services
The trend towards cloud-based processing and AI integration is transforming drone capabilities. WebSockets are the connective tissue that enables drones to seamlessly interact with powerful cloud services. For instance, a drone collecting high-resolution imagery for mapping or 3D modeling can use a WebSocket connection to stream raw data to a cloud processing platform. This platform, leveraging vast computational resources and AI algorithms, can perform real-time image stitching, object recognition, or anomaly detection, and then push processed insights or updated mission parameters back to the drone.
Consider AI follow modes or obstacle avoidance systems that rely on external computational power. A drone might send its immediate sensor data (e.g., from vision cameras or LiDAR) via WebSockets to a cloud AI, which then processes this information faster and more comprehensively than an onboard chip could. The AI then transmits refined instructions or threat alerts back to the drone, enabling more intelligent and adaptive flight. This hybrid approach, combining onboard autonomy with cloud intelligence, is made efficient and practical thanks to the persistent, low-latency communication provided by WebSockets.
Remote Piloting and FPV Control (Advanced Implementations)
While traditional FPV (First Person View) systems often rely on dedicated analog or digital radio links for video transmission and control, WebSockets offer a compelling alternative or supplementary channel for advanced remote piloting, especially over IP networks. For scenarios where a drone is piloted from a remote location via the internet, WebSockets can facilitate the low-latency transmission of control inputs (joystick movements, throttle commands) from the pilot to the drone.
More innovatively, WebSockets can be used to stream control signals and receive feedback for multi-operator scenarios or when integrating with sophisticated simulation environments. While video streams typically require higher bandwidth and may use dedicated protocols, WebSockets can manage the critical control and feedback loops, ensuring that pilot commands are executed promptly and drone status is accurately reflected. This enables advanced use cases like remotely supervising multiple drones or allowing expert pilots to control drones from a central operations center thousands of miles away.
Drone Swarm Coordination and Collaborative Missions
The future of many drone applications lies in the deployment of coordinated swarms capable of executing complex collaborative missions, such as simultaneous mapping of large areas, synchronized light shows, or even cooperative cargo delivery. Achieving this level of coordination requires constant, real-time communication between individual drones and/or a central orchestrator.
WebSockets provide an ideal protocol for this inter-drone or drone-to-coordinator communication. Each drone in a swarm can maintain a WebSocket connection to a central server or even directly to peer drones. This enables the rapid exchange of positional data, task assignments, obstacle detections, and synchronized movement commands. If one drone detects an anomaly or an obstacle, it can immediately push this information to the swarm, allowing for collective adaptive responses. The persistent, bidirectional nature of WebSockets ensures that the swarm remains cohesive, responsive, and efficient, unlocking capabilities far beyond what individual drones can achieve.
Over-the-Air Firmware Updates and Diagnostics
Maintaining and updating drone fleets, especially large commercial or industrial deployments, can be a logistical challenge. Over-the-Air (OTA) firmware updates are critical for security patches, feature enhancements, and performance improvements. WebSockets can facilitate a robust and reliable channel for pushing these updates to drones. Rather than requiring drones to periodically check for updates (polling), a WebSocket connection allows a central management system to initiate updates directly to individual drones or an entire fleet when new firmware is available.
Furthermore, WebSockets enable real-time diagnostics. If a drone encounters an error or requires troubleshooting, diagnostic logs and system health data can be streamed continuously to a central monitoring system. This allows for proactive maintenance, rapid issue identification, and even predictive failure analysis, significantly improving the operational reliability and uptime of drone fleets.
Overcoming Challenges and Looking Ahead
While WebSockets offer profound advantages for drone technology, their implementation, especially in safety-critical and high-value applications, comes with its own set of challenges. Addressing these, particularly in the realm of security and scalability, is crucial for the continued growth and innovation within the drone sector.
Security Considerations for Drone Communication
Given that drones often operate with sensitive data (e.g., surveillance footage, proprietary mapping data) and in potentially vulnerable environments, the security of WebSocket communication is paramount. An unsecured WebSocket connection could be exploited, leading to unauthorized access, data interception, or even malicious control of a drone.
To mitigate these risks, secure WebSocket connections (WSS) must be universally adopted. WSS leverages Transport Layer Security (TLS/SSL) to encrypt the data exchanged between the drone and its counterpart, preventing eavesdropping and tampering. Furthermore, robust authentication and authorization mechanisms are essential. Drones and ground stations should authenticate each other using strong cryptographic methods (e.g., mutual TLS, OAuth tokens) to ensure that only authorized entities can establish and maintain communication. Regular security audits, penetration testing, and adherence to industry best practices for secure coding are vital to protect against vulnerabilities. The integrity of the data payload itself also needs attention, with mechanisms like digital signatures ensuring that commands or telemetry data have not been altered in transit.

Scalability and Performance in Large Deployments
As drone operations scale from individual flights to vast fleets and complex swarms, the ability of WebSocket infrastructure to handle a multitude of concurrent connections and high data volumes becomes critical. A single server might be overwhelmed by hundreds or thousands of drones simultaneously streaming data and receiving commands.
Designing for scalability involves architectural considerations such as load balancing across multiple WebSocket servers, distributed messaging queues (e.g., using technologies like RabbitMQ or Apache Kafka) to manage data streams, and efficient database solutions for storing and retrieving drone data. Cloud-native WebSocket services offered by major providers can abstract much of this complexity, providing highly scalable and resilient infrastructure. Additionally, optimizing message payload sizes, implementing efficient data compression, and intelligently filtering data to send only what is necessary can significantly improve performance and reduce bandwidth consumption, ensuring that even large-scale drone deployments remain responsive and reliable. The future of drone technology is intrinsically linked to robust, scalable, and secure communication, with WebSockets playing a central role in realizing this vision.