In the intricate world of flight technology, where precision, stability, and autonomous capabilities are paramount, the fundamental mathematical concepts of sine (sin) and cosine (cos) form an invisible but indispensable bedrock. Far from abstract theoretical constructs, these trigonometric functions are deeply embedded in the algorithms and computations that govern every aspect of a drone’s operation, from its initial take-off to sophisticated autonomous maneuvers and precise landings. Understanding “what are sin and cos” within the context of flight technology is to grasp the very language spoken by a drone’s onboard systems to interpret its environment, maintain equilibrium, and navigate space.
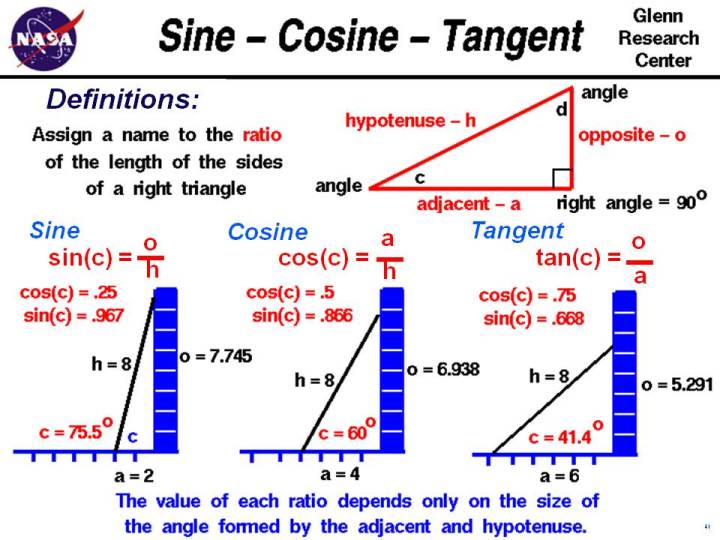
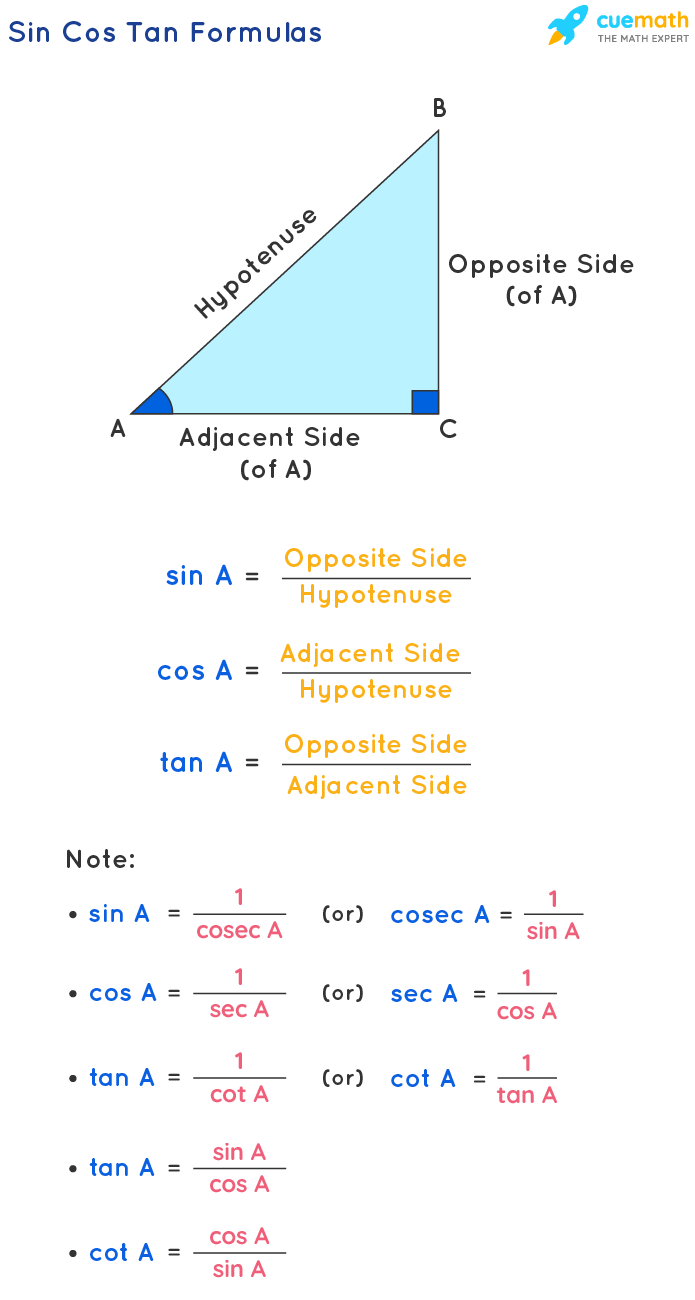
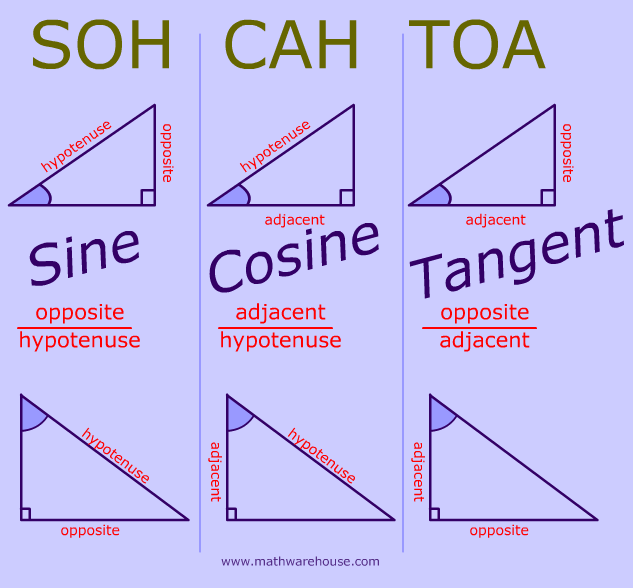
At their core, sine and cosine are functions that describe the relationship between angles and the sides of a right-angled triangle. In a unit circle (a circle with a radius of one centered at the origin of a coordinate system), for any given angle, the cosine of that angle represents the x-coordinate of the point where the angle’s terminal side intersects the circle, while the sine represents the y-coordinate. This seemingly simple geometric relationship unlocks powerful capabilities for translating angular motion into linear components and vice-versa, performing coordinate transformations, and calculating distances and vectors—all crucial operations for modern flight systems.
The Core of Orientation: Pitch, Roll, and Yaw
The ability of a drone to maintain stable flight and execute controlled movements hinges entirely on its understanding of its own orientation in three-dimensional space. This orientation is commonly described using three principal angles: pitch, roll, and yaw. Sine and cosine are the primary tools for measuring, interpreting, and controlling these angles.
Understanding Angular Measurement
Pitch refers to the nose-up or nose-down tilt of the drone, akin to an aircraft climbing or descending. Roll describes the side-to-side tilt, like banking during a turn. Yaw denotes the rotation around the vertical axis, changing the drone’s heading without altering its pitch or roll. Each of these rotational movements is continuously monitored and adjusted, with sine and cosine playing a critical role in decomposing complex 3D rotations into manageable components. For instance, determining the effect of a specific motor’s thrust on the drone’s overall pitch requires trigonometric calculations to project the force vector onto the appropriate rotational axis. The drone’s flight controller uses these functions to translate raw sensor data into meaningful angular positions and velocities.
IMUs and Sensor Fusion
Inertial Measurement Units (IMUs) are at the heart of a drone’s ability to sense its orientation. An IMU typically comprises accelerometers, gyroscopes, and often magnetometers.
- Accelerometers measure linear acceleration, but when a drone is tilted, gravity also acts along different axes. Sine and cosine are used to project the gravitational vector onto the drone’s body axes, allowing the flight controller to deduce the pitch and roll angles relative to the horizon. For example, if an accelerometer measures gravity primarily along the X-axis, trigonometry helps determine the exact angle of roll.
- Gyroscopes measure angular velocity. Over time, integrating these velocities yields angular position, but this method is prone to drift.
- Magnetometers sense the Earth’s magnetic field, providing a reference for yaw (heading).
Sensor fusion algorithms, such as Kalman filters or complementary filters, intricately weave together the data from these different sensors. These algorithms rely heavily on sine and cosine to perform transformations between different coordinate frames (e.g., from the sensor’s body frame to a global Earth frame) and to estimate the drone’s attitude (pitch, roll, yaw) with high accuracy, filtering out noise and compensating for sensor limitations. Without precise trigonometric calculations, the drone would struggle to distinguish between actual motion and sensor noise, leading to unstable and uncontrollable flight.
Precision Navigation and Waypoint Following
Autonomous drone navigation, including programmed waypoint missions and precise position holding, is fundamentally rooted in vector mathematics, which extensively employs sine and cosine. These functions are essential for translating global coordinates into actionable flight commands and for maintaining accurate trajectories.
GPS and Coordinate Transformations
Global Positioning System (GPS) receivers provide a drone with its location on Earth in terms of latitude, longitude, and altitude. However, the drone’s internal flight controller operates in a local coordinate system relative to its take-off point or current position. To navigate from point A to point B, the flight controller must calculate the distance and bearing (angle) to the target waypoint. This involves spherical trigonometry to handle the curvature of the Earth over longer distances, where sine and cosine are pivotal for converting between different geodetic coordinate systems and calculating precise great-circle distances and initial bearings. For shorter distances, simpler flat-Earth approximations also rely on these functions to determine the relative displacement (delta X, delta Y) to a target, which then dictates the necessary changes in thrust and heading.
Vector Math for Path Planning
Once the target vector (direction and magnitude) to the next waypoint is determined, sine and cosine are used to break this vector down into components that the drone can act upon. For instance, if a drone needs to move North-East, the overall thrust vector must be split into components that affect forward motion (north) and sideways motion (east). This decomposition allows the flight controller to command the appropriate motor speeds or control surface deflections to achieve the desired velocity and direction. Similarly, for obstacle avoidance, the drone’s path might need to be adjusted by a certain angle; sine and cosine enable the recalculation of the new target vector components.
Stabilizing Flight: The Control Loop
The real-time stabilization of a drone is a continuous feedback loop where sine and cosine are integral to interpreting sensor input and generating corrective outputs. This dynamic process ensures the drone remains level, resists external disturbances, and executes pilot commands smoothly.
Interpreting Sensor Data
Every millisecond, the drone’s flight controller gathers data from its IMU. The raw accelerometer data, which includes the effect of gravity, is processed using sine and cosine to estimate the drone’s current pitch and roll angles relative to the horizon. For example, the component of gravity acting along the drone’s pitch axis is proportional to the sine of the pitch angle, and similarly for roll. These trigonometric calculations effectively ‘remove’ the gravity component from the accelerometer readings to isolate actual linear acceleration, or conversely, use gravity to determine tilt. Gyroscope data, which provides angular rates, is also integrated and filtered using methods that often involve rotation matrices constructed with sine and cosine to predict the drone’s future orientation or correct for drift.
Actuator Commands and Real-time Adjustments
Once the current orientation (pitch, roll, yaw) and angular velocities are accurately determined, the flight controller compares these values to the desired setpoints (either from pilot input or autonomous mission parameters). Any discrepancy, known as the ‘error,’ triggers corrective actions. Proportional-Integral-Derivative (PID) controllers, commonly used in drones, calculate the necessary adjustments to motor speeds (for multirotors) or control surface deflections (for fixed-wing drones). These adjustments often involve transforming desired forces or torques into specific motor commands. Sine and cosine are used here to distribute the corrective forces among the individual motors. For example, to correct a roll error, the flight controller needs to increase thrust on one side and decrease it on the other. The exact magnitude of thrust change required from each motor, given its position and orientation relative to the drone’s center of gravity, is calculated using trigonometric relationships. This allows for precise, micro-second adjustments that keep the drone airborne and stable, even in gusty conditions.
Obstacle Avoidance and Environmental Awareness
The ability of a drone to perceive its surroundings and avoid collisions is a critical aspect of modern flight technology, especially for autonomous operations. Here again, sine and cosine provide the mathematical framework for spatial reasoning.
Calculating Distances and Angles
Lidar, radar, ultrasonic sensors, and vision systems generate data about the distance and angle to potential obstacles. When a sensor detects an object at a certain range and angle relative to the drone’s forward direction, sine and cosine are used to convert these polar coordinates into Cartesian (X, Y, Z) coordinates within the drone’s local reference frame. This transformation allows the flight controller to build a dynamic map of its immediate environment, identifying the exact position of obstacles. For example, if a sensor reports an object 5 meters away at an angle of 30 degrees to the right of the drone’s heading, sine and cosine will calculate its position as (5 * cos(30°), 5 * sin(30°)) relative to the drone.
Real-time Decision Making
Based on this obstacle map, the drone’s navigation system must make real-time decisions about adjusting its flight path. If an obstacle is detected, the flight controller might calculate an evasion maneuver. This involves determining a new trajectory that avoids the obstacle by a safe margin. Sine and cosine are used to calculate new waypoints, modify existing path segments, and ensure that the drone executes a smooth, safe turn or ascent/descent. The vector math involved in path planning and re-planning, where new headings and velocities are derived, relies fundamentally on these trigonometric functions to decompose and compose motion vectors in 3D space.
The Ubiquity of Trigonometry in Drone Firmware
From the low-level processing of sensor data to high-level autonomous decision-making, sine and cosine are woven into the very fabric of drone flight technology. They are not merely academic concepts but indispensable mathematical operators that enable drones to understand their position, orientation, and surroundings, translating raw data into actionable intelligence.
Efficiency and Performance
Modern drone firmware and control systems are highly optimized for speed and efficiency. Fast and accurate computation of sine and cosine is critical because these functions are called thousands of times per second. While microcontrollers often have dedicated floating-point units to accelerate these calculations, specialized lookup tables or CORDIC (Coordinate Rotation Digital Computer) algorithms are sometimes employed to achieve even faster results, particularly in resource-constrained environments. The accuracy of these trigonometric computations directly impacts the drone’s stability, navigation precision, and overall reliability. Without the precise mathematical foundation provided by sine and cosine, the advanced capabilities we associate with drones—from stable hovering and autonomous flight to sophisticated aerial cinematography and industrial inspections—would simply not be possible. They are the unseen heroes, transforming angles into action and enabling the marvels of modern flight.