The exploration of fundamental geometric principles often reveals unexpected depth, particularly when applied to complex engineering challenges like those found in flight technology. While seemingly abstract, understanding concepts such as the medians of a triangle offers profound insights into the mechanics of balance, stability, and control—factors paramount to the successful design and operation of Unmanned Aerial Vehicles (UAVs) and other advanced aircraft. At its core, a median of a triangle is a line segment that connects a vertex to the midpoint of the opposite side. Every triangle possesses three medians, and a remarkable property of these segments is that they all intersect at a single point known as the centroid. This centroid is not just a mathematical curiosity; it holds immense practical significance as the geometric center, and, crucially for flight dynamics, often corresponds to the center of mass (CoM) or center of gravity (CoG) of a uniformly dense triangular object. This inherent connection between a simple geometric construct and a critical physical property forms the bedrock for designing stable and efficient flight systems.
Geometric Fundamentals: The Centroid and Center of Mass
To appreciate the centroid’s role in flight technology, a brief revisit to its geometric definition is essential.
Defining Medians and Their Intersection
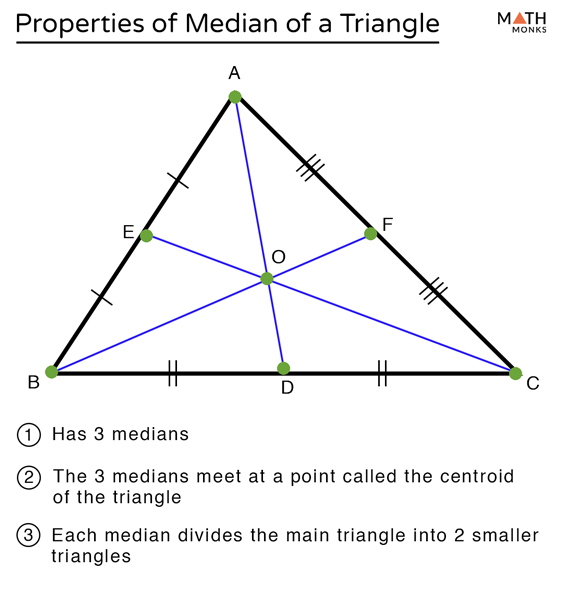
Consider any triangle, ABC. A median from vertex A connects to the midpoint of the opposite side BC. Similarly, medians originate from vertices B and C, extending to the midpoints of AC and AB, respectively. The beauty of these three lines lies in their convergence at a single point, the centroid, often denoted by G. This point is uniquely defined within every triangle and serves as a crucial reference for its internal structure. Importantly, the centroid divides each median in a 2:1 ratio, with the longer segment always being between the vertex and the centroid. This proportional division hints at its significance as a balancing point.
The Centroid as the Balance Point
In physics and engineering, the concept of a center of mass (CoM) or center of gravity (CoG) is indispensable. For any object, the CoM is the unique point where the weighted relative position of the distributed mass sums to zero. It is the average position of all the mass in the object. For a planar object with uniform density, like a perfectly cut triangular plate, the centroid is precisely its center of mass. If you were to balance this triangular plate on a pin, the pin would need to be placed exactly at the centroid for the plate to remain level. This direct relationship between the geometric centroid and the physical CoM is the critical bridge connecting abstract geometry to tangible flight dynamics, particularly in the realm of aircraft stability.
The Critical Role of Center of Gravity in Flight Dynamics
For any airborne vehicle, from a commercial airliner to a micro-drone, the center of gravity is arguably the single most important parameter determining its flight characteristics. Its position dictates how the aircraft responds to control inputs, atmospheric disturbances, and changes in payload, fundamentally impacting its stability and maneuverability.
Stability and Control: Why CoG Matters for UAVs
The stability of an aircraft refers to its ability to return to its original flight attitude after being disturbed. For positive longitudinal stability, the CoG must be positioned correctly relative to the aircraft’s aerodynamic center (the point where the aerodynamic forces effectively act). If the CoG is too far aft (towards the tail), the aircraft becomes longitudinally unstable, prone to pitching oscillations, and extremely difficult, if not impossible, to control safely. Conversely, a CoG positioned too far forward (towards the nose) can lead to excessive stability, making the aircraft sluggish and unresponsive to control inputs, requiring greater control surface deflection or motor thrust adjustments to pitch up. For drones, which rely heavily on precise electronic stabilization systems and flight controllers, an optimally placed CoG significantly reduces the burden on these systems, allowing for smoother, more predictable flight paths and more responsive controls. The flight controller’s algorithms constantly adjust motor speeds to maintain balance; if the physical balance is inherently poor due to an off-center CoG, the system works harder, consumes more power, and results in less efficient and less stable flight.
Impact on Maneuverability and Energy Efficiency

Maneuverability, the ability of an aircraft to change its flight path rapidly and efficiently, is also heavily influenced by the CoG. An aircraft with a well-placed CoG can pivot around this point with minimal effort, allowing for agile turns, ascents, and descents. For racing drones, aerial cinematography platforms, or inspection UAVs requiring intricate flight paths, precision maneuverability is paramount. An off-center CoG requires continuous, asymmetric thrust adjustments from the motors to maintain a desired attitude or execute a maneuver, which consumes more energy. This directly translates into reduced flight times, a critical limitation for battery-powered UAVs where every milliamp-hour counts. Moreover, persistent imbalances can induce undesirable vibrations throughout the airframe, which not only reduce the lifespan of components but also negatively impact the quality of sensor data, GPS accuracy, and camera footage. Therefore, achieving an optimal CoG is not just about ensuring stability, but also about maximizing performance, operational efficiency, and overall reliability.
Applying Centroidal Principles in Drone Design and Engineering
The theoretical understanding of medians and centroids finds its practical application in every stage of drone development, from initial concept to final assembly. Engineers leverage these geometric insights to predict and control the CoG of complex systems, ensuring that physical prototypes align with aerodynamic and control requirements.
Strategic Component Placement for Optimal Balance
A drone is an intricate assembly of various components: a frame, motors, propellers, flight controller, battery, camera, gimbal, GPS module, and more. Each component has its own mass and position. The overall CoG of the drone is the weighted average of the CoGs of all its individual parts. Drone designers meticulously consider the placement of heavier components like batteries, cameras, and payloads to ensure the overall CoG is as close as possible to the ideal balance point, typically at the geometric center of the propeller plane for multirotors. This often involves iterative design processes using sophisticated Computer-Aided Design (CAD) software to model component placement and calculate the resulting overall CoG. For example, a heavy camera mounted on a gimbal beneath the drone might necessitate placing the battery slightly further back or higher up to counteract its forward and downward pull, thereby maintaining the desired overall CoG. The geometric concept of a centroid informs this painstaking process, guiding designers to identify the “median” or central balance point of their aggregate mass distribution, ensuring that the drone can achieve symmetrical thrust for level flight.
Material Distribution and Structural Integrity
Beyond component placement, the very structure of the drone frame contributes to its overall CoG. Engineers use various materials (carbon fiber composites, aluminum alloys, high-strength plastics) with different densities and stiffness properties. The distribution of these materials throughout the frame must also be considered; while the frame aims for lightweight construction, strategically placing denser materials or reinforcements can subtly influence the CoG. For example, reinforcing critical joints with slightly denser material might shift the local CoG, which needs to be accounted for in the overall calculation. Furthermore, the geometric integrity of the frame, often comprising triangular or truss-like sections for strength and rigidity, relies on principles directly related to medians and centroids. These structural elements ensure that forces from propulsion and external loads are distributed efficiently and that the frame itself remains stable and resistant to deformation, crucially maintaining the fixed relative positions of components to the overall CoG during dynamic flight maneuvers. The choice of structural geometry, even if not a literal triangle, often seeks to achieve a stable “center” for load bearing, mirroring the centroid’s role in geometric stability.
Advanced Stabilization Systems and Geometric Precision
Modern flight technology, particularly in autonomous and high-performance drones, goes beyond passive CoG management through careful design. Active systems and advanced algorithms further refine balance and stability, enabling unprecedented levels of control and adaptability.
Sensors and Feedback Loops for Dynamic CoG Adjustment
While static CoG optimization is fundamental during design, actual flight involves dynamic changes. Fuel consumption in traditional aircraft, payload deployment, or even environmental factors like sustained wind gusts can subtly shift the effective CoG. Modern flight controllers in drones use an array of sophisticated sensors—Inertial Measurement Units (IMUs) with high-precision accelerometers and gyroscopes, magnetometers, and GPS modules—to constantly monitor the drone’s attitude, velocity, and movement in three-dimensional space. These sensors provide real-time data about the drone’s orientation relative to gravity and its intended flight path. The flight controller’s sophisticated algorithms then interpret this data, identifying any deviations from the desired stability or trajectory. If an imbalance or unexpected shift in attitude is detected (which could be indicative of an effective CoG shift), these algorithms calculate precise adjustments, sending commands to individual motors to vary their thrust. This creates differential lift, effectively shifting the “center of thrust” to counteract the perceived CoG imbalance, bringing the drone back to a stable attitude. In essence, the drone is continuously performing micro-adjustments to maintain its virtual balance point, akin to autonomously finding and staying on its dynamic centroid, thereby ensuring smooth and stable flight regardless of internal or external perturbations.

The Future of Autonomous Balance and Adaptive Flight
The future of flight technology will see even more sophisticated applications of these principles, driven by advancements in artificial intelligence and machine learning. AI is being integrated into flight control systems, enabling drones to learn and adapt to changing CoG conditions in real-time. This includes predictive modeling for anticipated shifts (e.g., during complex maneuvers, rapid accelerations, or when carrying payloads that might shift internally) and autonomous compensation strategies. Imagine a drone that can dynamically recalculate its optimal CoG based on sensor data and environmental conditions, then adjust its control surface deflections or propeller speeds with unprecedented precision, even anticipating movements before they occur. Furthermore, modular drone designs, where components can be easily swapped or reconfigured for different missions, will benefit immensely from systems that can automatically detect the new mass distribution and calibrate the flight controller to maintain the optimal balance point. The geometric simplicity of a triangle’s medians and centroid serves as an enduring metaphor for the quest for perfect balance and stability, a quest that remains central to pushing the boundaries of autonomous and stable flight in the ever-evolving landscape of flight technology.