Understanding the Equilibrium of Flight
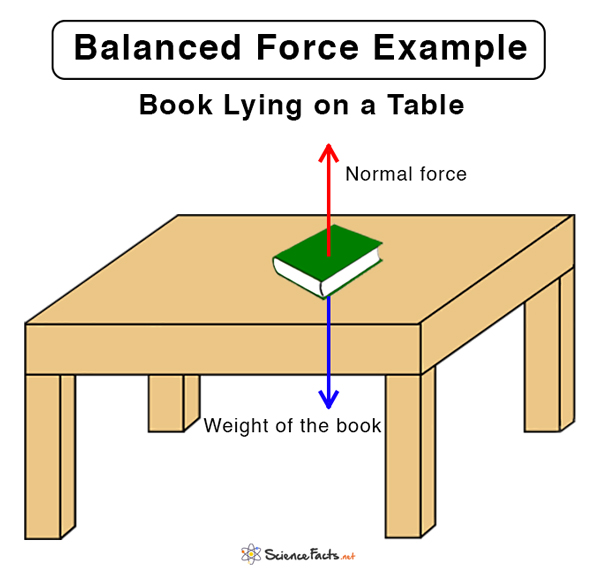
In the realm of flight technology, the concept of balanced forces is not merely an academic curiosity; it is the fundamental principle that governs the very act of staying aloft and maneuvering with precision. Whether dealing with sophisticated unmanned aerial vehicles (UAVs) or advanced navigation systems, understanding how forces interact and achieve equilibrium is paramount. Balanced forces, in essence, describe a state where all opposing forces acting on an object are equal in magnitude and opposite in direction. This results in no net force, meaning the object’s state of motion will not change. For a drone or any flying machine, this equilibrium dictates its ability to hover, ascend, descend, or maintain a steady altitude.
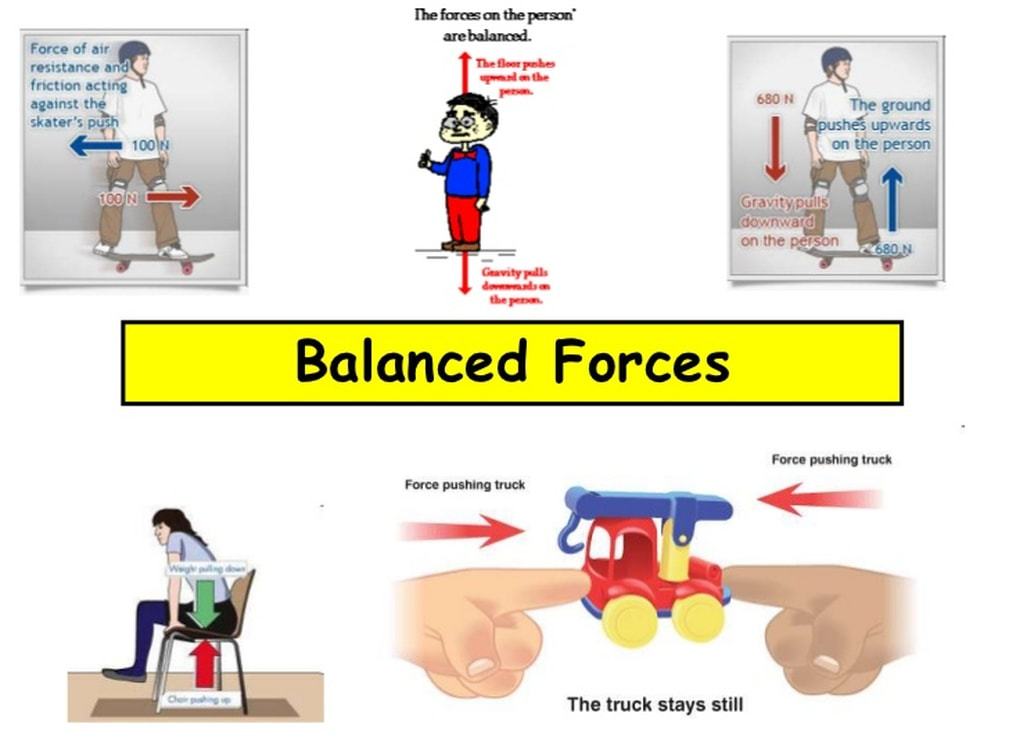
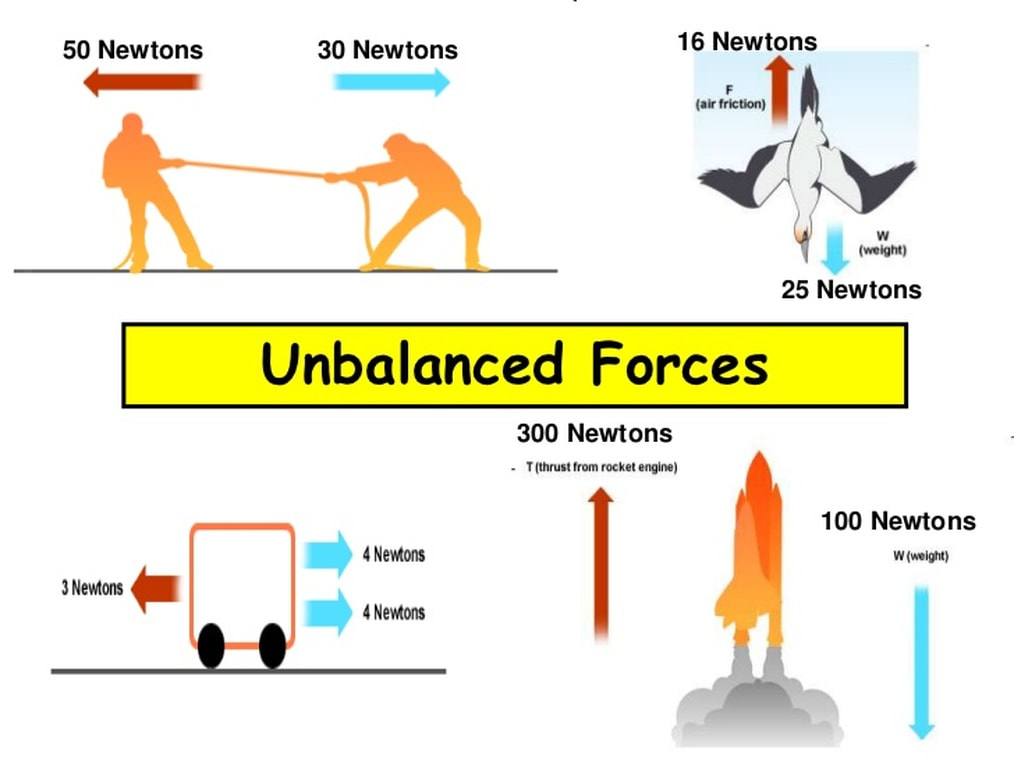
The primary forces at play in aerial dynamics are lift, weight, thrust, and drag. Lift is the upward force generated by the wings or rotors, opposing the downward force of weight (gravity). Thrust is the forward force, typically generated by propellers or engines, counteracting drag, which is the resistance of the air. When these forces are balanced, the aircraft will maintain its current state of motion. For a drone to hover, the upward lift generated by its rotors must precisely equal its weight. If lift exceeds weight, the drone ascends. If weight exceeds lift, it descends. Similarly, for stable forward flight, the thrust must equal the drag. Deviations from this balance are what enable controlled movement and sophisticated flight maneuvers.
Navigation systems are designed to precisely manage these forces. Inertial Measurement Units (IMUs), incorporating accelerometers and gyroscopes, constantly detect changes in the drone’s orientation and acceleration. This data is fed into the flight controller, which then adjusts the output of the motors to counteract any imbalances. For instance, if a gust of wind pushes the drone sideways, the IMU detects the unwanted acceleration. The flight controller then commands the motors to increase their speed on the side opposite the wind’s push and decrease it on the side facing the wind, thereby re-establishing equilibrium and keeping the drone on its intended path. GPS systems, while crucial for positional awareness, rely on the drone’s ability to maintain stable flight through force management. Without balanced forces, even a perfect GPS signal would lead to erratic and uncontrolled movement.
Stabilization systems, often employing complex algorithms, are dedicated to maintaining this delicate balance. They work in conjunction with sensors to identify and correct for external disturbances or internal inconsistencies. The gimbal system on a camera, while primarily for imaging, also relies on the principle of balanced forces to keep the camera stable despite the drone’s movements. This stabilization is achieved through the counteraction of forces on the gimbal’s axes, ensuring a smooth and steady visual output, a direct application of force equilibrium in a specific subsystem.
The Fundamental Forces in Aerial Dynamics
The interplay of lift, weight, thrust, and drag forms the bedrock of flight. Understanding their vector nature and how they sum to a net force is critical for comprehending drone behavior.
Lift and Weight: The Vertical Equilibrium
Lift is the upward force produced by the interaction of air with the drone’s rotors. For a quadcopter, the four rotors generate this lift. The speed at which these rotors spin directly influences the magnitude of the lift produced. Weight, conversely, is the force of gravity pulling the drone downwards. When lift equals weight, the drone experiences vertical equilibrium, allowing it to maintain a constant altitude. If the rotors spin faster, lift increases, exceeding weight, and the drone ascends. Conversely, slower rotor speeds reduce lift, causing the drone to descend. This constant adjustment of rotor speed is the primary mechanism for vertical control.
Thrust and Drag: The Horizontal Equilibrium
Thrust is the forward or backward force generated to propel the drone. In most multirotor drones, this is achieved by collectively increasing the speed of all rotors to generate a forward vector of thrust, or by tilting the entire drone forward. Drag is the force exerted by the air resisting the drone’s motion. It acts in the opposite direction to the drone’s velocity. For steady horizontal flight, the thrust must be equal and opposite to the drag. If thrust exceeds drag, the drone accelerates forward. If drag exceeds thrust, it decelerates. Advanced flight control systems constantly modulate thrust to overcome drag and maintain a desired speed or to initiate changes in velocity.
Applications of Balanced Forces in Drone Operation
The theoretical understanding of balanced forces translates into tangible operational capabilities for drones, from simple hovering to complex navigation.
Hovering: A State of Static Equilibrium
Hovering is perhaps the most straightforward example of balanced forces. In this state, the drone is stationary in the air. This implies that the upward force of lift generated by the rotors is exactly equal to the downward force of weight. There is no net vertical force, hence no vertical acceleration. Simultaneously, any horizontal forces, such as wind, are being actively counteracted by the flight controller’s adjustments to rotor speeds. This precise balancing act requires continuous micro-adjustments to maintain a stable position.
Straight and Level Flight: Maintaining Momentum
When a drone flies straight and level at a constant speed, it is also operating under balanced forces. The lift generated by the rotors precisely matches the drone’s weight, preventing any change in altitude. Concurrently, the thrust generated by the propellers (or the forward tilt of the drone) is equal and opposite to the drag exerted by the air. This equilibrium of horizontal forces means there is no net horizontal acceleration, and the drone maintains its speed. Any deviation from this balance, such as a sudden increase in drag due to a change in air density, would require the flight controller to increase thrust to restore equilibrium.
Stabilization Systems: The Active Guardians of Equilibrium
Stabilization systems are sophisticated technologies that continuously monitor and adjust forces to maintain equilibrium, especially in dynamic and unpredictable environments. These systems are crucial for safe and effective drone operation, enabling capabilities that would otherwise be impossible.
Inertial Measurement Units (IMUs): Detecting Imbalances
An IMU is the sensory core of any stabilization system. It typically comprises accelerometers and gyroscopes. Accelerometers measure linear acceleration, detecting changes in speed and direction. Gyroscopes measure angular velocity, sensing rotational motion. When a drone is subjected to an external force, such as a gust of wind, or experiences an internal shift (like a change in payload), the IMU detects these disturbances as accelerations or rotations. This raw data is then processed to understand the drone’s deviation from its intended stable state.
Flight Controllers: The Decision Makers
The flight controller acts as the brain of the drone, receiving data from the IMU and other sensors (like GPS and barometers). Based on programmed algorithms, it interprets the IMU data as an imbalance of forces. For example, if an accelerometer detects a sudden sideways acceleration due to a crosswind, the flight controller calculates the necessary counteracting force. It then sends precise commands to the electronic speed controllers (ESCs) for each motor. These commands dictate how much power is delivered to each motor, thereby adjusting their rotational speed and, consequently, the lift and thrust they produce.
Gimbal Stabilization: Maintaining Image Clarity
While not directly related to the drone’s overall flight stability, camera gimbals employ similar principles to maintain image stability. A gimbal uses motors and sensors to counteract the drone’s movements, keeping the camera pointed in a fixed direction or following a specific trajectory. If the drone pitches up, the gimbal counteracts this by tilting the camera down. This is achieved through a feedback loop where sensors detect the drone’s movement, and motors apply opposing forces to maintain the desired camera orientation. This creates a smooth, stable video feed, even during aggressive drone maneuvers. The balanced forces here are applied at the gimbal level to isolate the camera from external disturbances.
Obstacle Avoidance Systems: Proactive Force Management
More advanced drones incorporate obstacle avoidance systems, which actively use sensors (like sonar, lidar, or visual cameras) to detect potential hazards. These systems don’t just react to imbalances; they proactively adjust forces to prevent them from occurring. If an obstacle is detected in the drone’s path, the flight controller will initiate a maneuver to avoid it. This might involve increasing thrust to ascend, applying differential thrust to swerve, or generating thrust in a new direction to move sideways. The goal is to create a new set of balanced forces that result in a safe avoidance trajectory, ensuring that the drone’s path does not intersect with the obstacle.
Navigating Complexity: GPS and Autonomous Flight
The integration of GPS and autonomous flight capabilities further highlights the critical role of balanced forces. These systems leverage the ability to precisely control and maintain equilibrium to achieve sophisticated navigation and mission execution.
GPS and Position Hold: Maintaining a Fixed Point
While GPS provides positional coordinates, maintaining a stable position (known as position hold) is a direct consequence of effective force balancing. When a drone is in position hold mode, the flight controller constantly receives GPS data, comparing the drone’s current location with its target location. If the drone drifts due to wind or other factors, the GPS data indicates this deviation. The flight controller then interprets this as an imbalance and adjusts motor speeds to generate corrective forces, pushing the drone back towards its intended coordinates. The lift and thrust are precisely modulated to counteract external forces and maintain the drone’s spatial stability.
Autonomous Flight Paths: Predictive Force Control
Autonomous flight, whether for mapping, inspection, or delivery, relies heavily on the drone’s ability to execute pre-programmed flight paths with high accuracy. This involves maintaining balanced forces not just for stability but also for executing planned turns, ascents, and descents. The flight controller, guided by the autonomous mission plan and sensor data, continuously calculates and applies the necessary forces to follow the designated trajectory. This might involve complex sequences of thrust adjustments and directional vector changes to navigate through challenging environments while ensuring that all forces remain balanced to achieve the desired movement.
AI Follow Mode: Dynamic Force Adjustments
AI-driven features like “Follow Me” mode showcase an advanced application of balanced forces. The drone uses its sensors to track a subject. As the subject moves, the drone must constantly adjust its position and speed to maintain a predetermined distance and relative angle. This requires dynamic and responsive control of lift, thrust, and drag. The flight controller must predict the subject’s movements and proactively adjust the drone’s forces to keep pace, turn appropriately, and maintain altitude. The “balanced forces” in this scenario are not static but are continuously shifting to maintain a dynamic equilibrium relative to the moving subject.
The Future of Flight and Force Equilibrium
As flight technology continues to evolve, the principles of balanced forces will remain at its core, albeit implemented with ever-increasing sophistication and intelligence. The pursuit of greater efficiency, maneuverability, and autonomy hinges on our ability to master and manipulate these fundamental physical laws.
Enhanced Aerodynamics and Propulsion
Future advancements in aerodynamics and propulsion systems will enable drones to generate lift and thrust more efficiently. This could involve novel wing designs for fixed-wing UAVs or more advanced rotor configurations for multirotors. Improved efficiency means that less energy is required to maintain balanced forces, leading to longer flight times and greater payload capacities. The challenge will be to integrate these new technologies while ensuring they can still be precisely controlled by sophisticated flight management systems to maintain the necessary equilibrium.
Smarter Sensors and Control Algorithms
The development of more advanced sensors and artificial intelligence algorithms will further refine the ability to manage balanced forces. Imagine drones that can predict wind shear and proactively adjust their forces before turbulence even affects them, or systems that can reconfigure themselves mid-flight to optimize force distribution for different tasks. Machine learning will play a crucial role in developing adaptive control systems that can learn from their environment and optimize force management for any given situation, pushing the boundaries of what is possible in aerial operations.
Human-Machine Integration and Control
The interaction between humans and drones will also evolve. Advanced control interfaces, potentially leveraging brain-computer interfaces or highly intuitive gesture controls, will allow pilots to exert finer control over the forces acting on the drone. This could enable incredibly precise maneuvers for tasks like aerial artistry or complex construction. The underlying principle remains the same: the pilot’s intent translated into precise commands that manipulate the drone’s forces to achieve a desired state of equilibrium or controlled imbalance. The mastery of balanced forces is, and will continue to be, the silent, invisible engine driving the progress of flight technology.