In the rapidly evolving world of drone technology, innovation is often driven by sophisticated software. From intricate flight planning algorithms and real-time data processing engines to advanced machine learning models for object recognition and environmental mapping, specialized applications are the bedrock of cutting-edge aerial operations. For professionals leveraging Linux-based systems – whether on ground control stations, dedicated processing servers, or even onboard drone companion computers – the ability to reliably install and manage these critical software components is paramount. This is where RPM (Red Hat Package Manager) files play a crucial role. These standardized packages provide a robust, efficient, and dependency-aware method for deploying complex software solutions essential for mapping, remote sensing, autonomous flight, and AI-driven drone applications. Understanding how to effectively install an RPM file is not merely a technical skill; it’s a gateway to unlocking the full potential of advanced drone technology and innovation.
Understanding RPM Packages in Drone Ecosystems
RPM packages are a widely adopted packaging format for software distribution on Red Hat-based Linux distributions, including Fedora, CentOS, RHEL, and their derivatives. Within the drone ecosystem, RPMs serve as a structured container for distributing a diverse range of specialized software. This can include:
- Ground Control Station (GCS) Software: Advanced GCS applications often integrate with mapping tools, telemetry analysis platforms, and mission planning utilities. RPMs ensure that all necessary libraries and executables for these sophisticated GCS applications are bundled and installed correctly.
- Data Processing Engines: For tasks like photogrammetry (generating 3D models from drone imagery), LiDAR point cloud processing, or multispectral imagery analysis, specialized open-source or commercial software is often distributed as RPMs. These packages can encapsulate entire frameworks, such as OpenDroneMap components or libraries like GDAL and PDAL, alongside their numerous dependencies.
- AI/ML Frameworks and Applications: Developers implementing AI-driven object detection, autonomous navigation algorithms, or predictive maintenance analytics often package their custom applications, alongside specific versions of TensorFlow, PyTorch, or OpenCV libraries, into RPMs for consistent deployment on processing servers or edge devices.
- Custom Firmware Utilities and Onboard Software: For drones equipped with companion computers running Linux (e.g., Raspberry Pi, NVIDIA Jetson), specialized software for real-time sensor fusion, edge AI processing, or custom communication protocols might be deployed via RPMs, facilitating easier updates and management.
The primary advantage of using RPMs in this context lies in their ability to standardize the installation process, manage software dependencies efficiently, and simplify updates. Instead of manually compiling source code or dealing with scattered files, RPMs provide a clean, atomic unit for installing and uninstalling complex drone-related software stacks, ensuring system integrity and minimizing configuration headaches.
Prerequisites for RPM Installation on Drone-Centric Systems
Before initiating the installation of an RPM file, ensuring that your system meets the necessary prerequisites is crucial for a smooth and successful deployment, especially when dealing with critical drone-related software.
A Compatible Linux Environment
The most fundamental requirement is a Linux distribution that supports RPM packages. This typically includes Fedora, Red Hat Enterprise Linux (RHEL), CentOS Stream, Rocky Linux, AlmaLinux, or SUSE Linux Enterprise. While the core rpm command is universal, the higher-level package managers like dnf (or yum on older systems) are specific to these distributions and are highly recommended for their dependency resolution capabilities. Most advanced drone software development or processing is performed on x86_64 architectures, but some specialized embedded applications might target ARM-based systems, requiring architecture-specific RPMs.
Administrative Privileges
Installing software via RPM packages typically involves writing files to system directories, modifying configurations, and potentially installing system-wide libraries. Therefore, you will need administrative privileges, commonly granted through sudo access. Without appropriate permissions, installation commands will fail, preventing the deployment of your drone software.
Network Connectivity (for Dependency Resolution)
While a standalone RPM file can be installed without internet access, most complex drone software relies on numerous external libraries and dependencies that are often not bundled within the RPM itself. When using package managers like dnf, these dependencies are automatically fetched from configured software repositories. Therefore, active internet connectivity is generally required to resolve and download any missing prerequisites, ensuring the drone software operates correctly. This is particularly relevant for geospatial libraries, machine learning frameworks, or specific sensor SDKs.
Knowledge of Package Sources and Integrity
It is paramount to source RPM files from trusted providers. This could be official project repositories (e.g., OpenDroneMap’s RPM releases), reputable commercial vendors, or your organization’s internal software distribution channels. Installing RPMs from unknown or untrusted sources can introduce security vulnerabilities or system instability, which is unacceptable for mission-critical drone operations. Furthermore, understanding how to verify package integrity using GPG signatures is a recommended best practice for ensuring the authenticity and untouched nature of the software.
The Core Installation Process: Command-Line and Graphical Methods
Installing an RPM file on a Linux system typically involves command-line tools, which offer greater control and provide detailed feedback. However, graphical interfaces are also available for simpler deployments.
Using the rpm Command for Direct Installation
The rpm command is the foundational tool for managing RPM packages. It allows for direct installation of a specific .rpm file.
To install an RPM package, navigate to the directory where the .rpm file is located and use the following command:
sudo rpm -ivh package_name.rpm
Let’s break down the flags:
sudo: Executes the command with superuser privileges, necessary for system-wide installation.-i: Instructsrpmto install the package.-v: Provides verbose output, showing details of the installation process.-h: Displays a hashmark progress bar, giving a visual indication of the installation’s progress.
Example: If you have downloaded an RPM for a custom drone telemetry analysis tool named drone-telemetry-analyzer-1.0.0.rpm, you would run:
sudo rpm -ivh drone-telemetry-analyzer-1.0.0.rpm
Important Consideration: Dependency Management with rpm: A significant limitation of the rpm command is its inability to automatically resolve and install dependencies. If drone-telemetry-analyzer requires specific versions of Python libraries, geospatial tools, or other system components that are not already present, rpm will halt the installation with a “failed dependencies” error. In such cases, you would either need to manually find and install each missing dependency or, more practically, use a higher-level package manager like dnf.
Leveraging dnf or yum for Comprehensive Drone Software Management
For a much smoother and more robust installation experience, especially for complex drone software suites with numerous dependencies, dnf (or yum on older RHEL/CentOS 7 systems) is the preferred tool. dnf not only installs the specified RPM but also automatically identifies, downloads, and installs all required dependencies from configured software repositories.
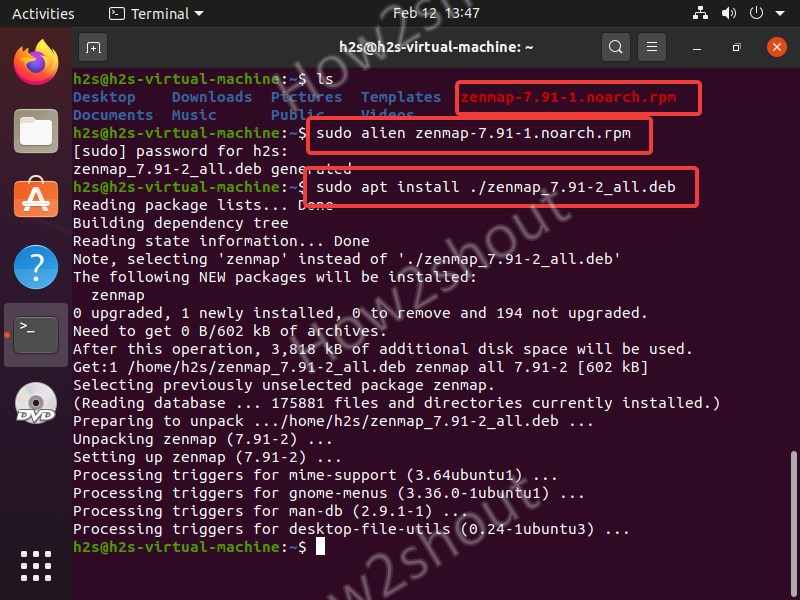
Installing a Local RPM File with dnf
To install an RPM file that you have downloaded locally, dnf can be used directly:
sudo dnf install /path/to/your/package_name.rpm
Example:
sudo dnf install ~/Downloads/opendronemap-processor-2.0.0.rpm
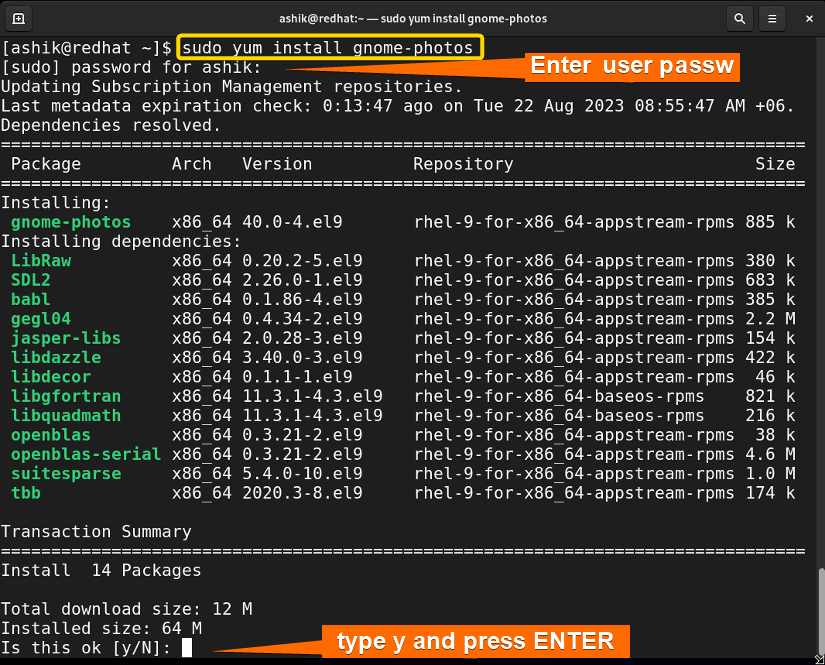
dnf will scan the RPM, determine its dependencies, prompt you to confirm the installation of both the package and its dependencies, and then proceed with the installation. This is invaluable when deploying extensive drone mapping or AI software that relies on a deep stack of underlying libraries.
Installing from Configured Repositories
Even more powerful is dnf‘s ability to install packages directly from remote software repositories. Many open-source drone projects or commercial vendors provide their own dnf repositories, which you can add to your system. Once added, you can install software by simply referring to its package name:
- Add a Repository (if necessary): This usually involves downloading a
.repofile or running a command provided by the software vendor.
Example (adding an imaginary drone analytics repository):
bash
sudo dnf config-manager --add-repo https://example.com/drone-analytics.repo
- Install the Package:
bash
sudo dnf install package_name
Example:
bash
sudo dnf install drone-analytics-suite
dnfwill then check its configured repositories (including any new ones you’ve added), find thedrone-analytics-suitepackage, and install it along with all its prerequisites. This method simplifies updates and ensures you’re always pulling from the officially sanctioned source.
Graphical Package Managers for User-Friendly Deployment
For users who prefer a graphical interface, modern Linux desktop environments (like GNOME, KDE Plasma) include graphical software centers (e.g., GNOME Software, KDE Discover). These applications can often open .rpm files directly from your file browser. When you double-click an RPM, the software center will typically launch, provide details about the package, and offer an “Install” button. These tools also leverage dnf or yum in the background for dependency resolution, making them a user-friendly option for less technical users deploying drone utility apps or desktop-based GCS. However, for server deployments, automated scripts, or complex troubleshooting, the command-line remains the tool of choice for drone specialists.
Post-Installation and Troubleshooting for Drone Software
Successfully installing an RPM file for drone-related software is often just the first step. Proper post-installation verification and proactive troubleshooting are essential to ensure the new application integrates seamlessly into your workflow for mapping, remote sensing, or autonomous flight operations.
Verifying Installation and Initial Configuration
After the installation completes, it’s crucial to confirm that the software is correctly installed and ready for use.
-
Check for Executables:
Most installed programs will place their main executable files in standard system paths (e.g.,/usr/bin/). You can often verify by simply typing the program’s name in the terminal and pressing Tab for autocompletion, or by running a version check:drone-mapping-tool --versionor for a processing service:
systemctl status drone-data-ingestion.serviceThis confirms the binaries are accessible and the service is running as expected.
-
Review Documentation for First-Run Setup:
Specialized drone software, particularly for mapping or AI, often requires initial configuration steps. This might include:- Setting up environment variables for data directories or API keys.
- Configuring database connections for telemetry or image metadata.
- Defining sensor calibration parameters.
- Running initial setup scripts provided by the package.
Always refer to the software’s official documentation for these critical post-installation tasks.
-
Run a Simple Test Case:
If possible, execute a minimal test to confirm basic functionality. For instance, if you installed a photogrammetry tool, try processing a very small dataset of drone images. If it’s an AI object detection framework, attempt to run it against a sample image or video stream. This validates the entire software stack is operational.
Common Issues and Resolutions
Despite careful preparation, issues can arise during or after RPM installation.
-
Dependency Conflicts or Missing Dependencies:
- Symptom: “Error: Failed dependencies” during
rpm -ivh, ordnfreporting dependency resolution failures. - Resolution: Always prefer
dnf installoverrpm -ivhasdnfhandles dependencies automatically. Ifdnfstill fails, ensure your repository configurations are correct and up-to-date (sudo dnf update). Sometimes, a specific dependency might be in an un-enabled repository, or a version conflict exists. Manually identifying and installing the conflicting dependency or usingdnf repoquery --whatprovides "dependency_name"can help. For critical but risky overrides (use with extreme caution!),rpm -Uvh --force package_name.rpmcan bypass dependency checks, but this often leads to a broken system.
- Symptom: “Error: Failed dependencies” during
-
GPG Signature Verification Failures:
- Symptom: “Public key for package_name.rpm is not installed.”
- Resolution: This means the system cannot verify the integrity of the package. You need to import the GPG key from the software vendor. Typically, this involves a command like:
bash
sudo rpm --import /path/to/keyfile.gpg
or the repository configuration will handle it when added. Always ensure you are importing keys from trusted sources.
-
“File Already Exists” Errors:
- Symptom: Installation fails because a file the RPM wants to install already exists on the system, often from another package or a manual installation.
- Resolution: This usually happens when installing an older version over a newer one, or if there’s a file conflict with another package. Use
dnf update package_nameto update an existing package safely. If you must overwrite,rpm -Uvh --force package_name.rpmcan bypass the check, but be aware of potential system instability.
-
No Command Found After Installation:
- Symptom: The installation appeared successful, but typing the program name results in “command not found.”
- Resolution: Ensure the directory containing the executable is in your system’s
PATHenvironment variable. Most RPMs place executables in standard/usr/binor/usr/local/bin, which are usually inPATH. If it’s a non-standard location, you might need to add it to your~/.bashrcor similar shell configuration file:
bash
export PATH=$PATH:/opt/drone_app/bin
Then,source ~/.bashrcto apply the change.
Updating and Removing Drone Software via RPM
Managing the lifecycle of your drone software is equally important.
-
Updating Software:
To update an installed RPM package (e.g., to benefit from new features for autonomous flight or improved mapping algorithms), usednf:sudo dnf update package_nameThis command will fetch the latest version from your configured repositories and update the installed package along with any new dependencies. For system-wide updates:
sudo dnf updateAlways exercise caution when updating critical drone-related software, especially on production systems. It’s often prudent to test updates in a staging environment first.
-
Removing Software:
If a drone application is no longer needed or you need to revert to a previous version,dnfcan cleanly remove it:
bash
sudo dnf remove package_name
This command uninstalls the package and any dependencies that were installed solely for that package and are no longer required by other software. This ensures a clean removal without leaving orphaned files.
Mastering RPM installation and management is a fundamental skill for anyone leveraging Linux to drive innovation in drone technology. It ensures robust, repeatable, and maintainable software deployments, allowing engineers and operators to focus on the advanced capabilities of their aerial platforms rather than struggling with software setup.