The Fundamentals of a Priority Queue
In the intricate world of advanced technology and innovation, particularly within the realm of autonomous systems like modern drones, efficiency and precision are paramount. At the heart of many sophisticated algorithms and real-time operations lies a fundamental data structure known as a priority queue. Unlike a standard queue, which operates on a “first-in, first-out” (FIFO) principle, a priority queue is designed to manage elements based on their assigned priority. This seemingly simple distinction unlocks a vast array of capabilities, allowing systems to process tasks, data, or events not in the order they arrived, but in the order of their importance or urgency.

Beyond First-In, First-Out (FIFO)
Traditional queues are intuitive: the first item to enter is the first item to leave, much like people waiting in a line. This model is perfectly adequate for many scenarios where processing order is strictly temporal. However, in dynamic, mission-critical environments such as drone flight control, autonomous navigation, or real-time sensor processing, not all tasks or pieces of data hold equal weight. Imagine a drone encountering a sudden obstacle versus logging routine telemetry data. The obstacle avoidance maneuver clearly demands immediate attention, while the telemetry can be processed slightly later. A standard queue would be ill-equipped to handle such varying degrees of urgency.
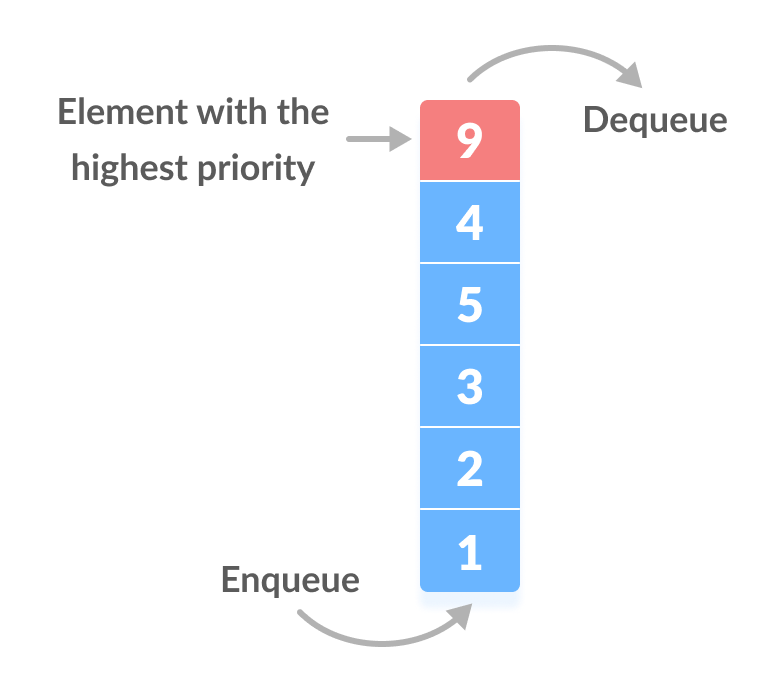
This is precisely where the priority queue shines. It allows elements to be inserted in any order but ensures that when an element is extracted (or “dequeued”), it is always the one with the highest priority. If multiple elements share the same highest priority, their processing order might default to FIFO or depend on the specific implementation, but the core principle remains: priority dictates precedence. This capability is indispensable for systems that must respond intelligently and adaptively to their environment, making it a cornerstone for innovation in drone technology.
How Priority Queues Work
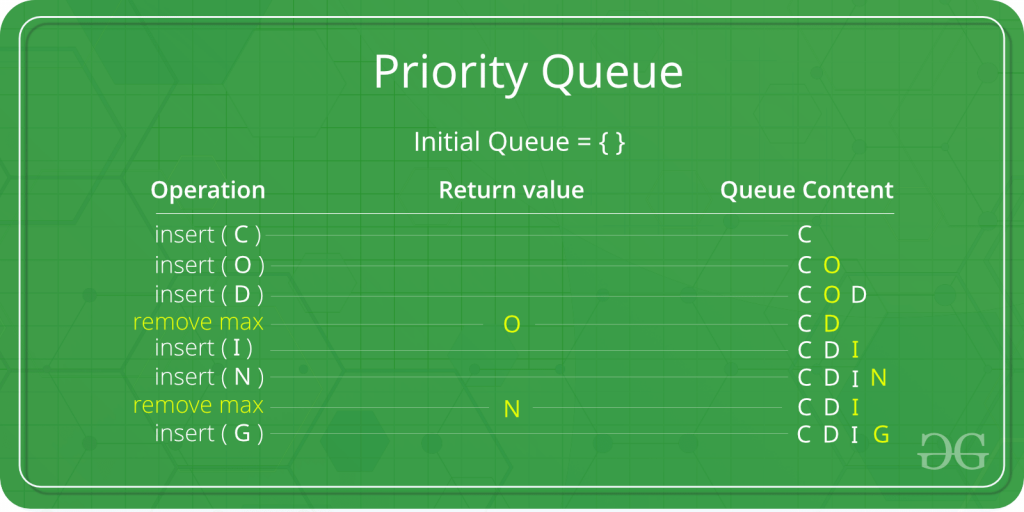
At its core, a priority queue must support two primary operations: inserting a new element with a specified priority and extracting the element with the highest priority. While conceptually straightforward, the efficiency of these operations is crucial for real-time systems. The most common and efficient way to implement a priority queue is using a data structure called a heap.
A heap is a specialized tree-based data structure that satisfies the heap property: for a min-heap, every parent node is smaller than or equal to its children, meaning the smallest element is always at the root. For a max-heap, every parent node is larger than or equal to its children, so the largest element is at the root. Priority queues typically use a min-heap to find the highest priority item (e.g., an item with the smallest priority value, where “1” is higher priority than “10”) or a max-heap for the reverse.
When a new element is inserted, it’s added to the end of the heap and then “bubbled up” (or “heapified”) to its correct position to maintain the heap property. When the highest-priority element is extracted, it’s removed from the root, and the last element in the heap is moved to the root, then “bubbled down” to restore the heap property. Both insertion and extraction operations typically have a time complexity of O(log n), where ‘n’ is the number of elements in the queue. This logarithmic efficiency is vital, as it allows sophisticated drone systems to manage a large number of concurrent tasks and data points without significant performance degradation, enabling rapid decision-making and responsive control.
Priority Queues in Autonomous Drone Navigation
Autonomous navigation is perhaps one of the most critical and complex challenges in drone technology, and priority queues play a pivotal role in enabling intelligent pathfinding and dynamic route planning. For a drone to navigate safely and efficiently from one point to another, especially in complex, unstructured, or changing environments, it must constantly evaluate potential paths and make optimal decisions.
Optimal Pathfinding Algorithms
The ability of a drone to autonomously navigate relies heavily on sophisticated pathfinding algorithms. Two of the most prominent examples, Dijkstra’s algorithm and the A* (A-star) search algorithm, extensively leverage priority queues. These algorithms work by exploring a graph of possible locations or states, systematically evaluating the cost or desirability of moving between them.
In both Dijkstra’s and A, the algorithm maintains a set of “open” nodes—locations that have been discovered but not yet fully processed. When selecting the next node to explore, it’s crucial to pick the one that offers the most promising path towards the goal. This is where the priority queue comes in. Each node in the open set is stored in a priority queue, with its priority determined by its estimated total cost from the start to the goal (for A) or its accumulated cost from the start (for Dijkstra’s).
By always extracting the highest-priority node (i.e., the one with the lowest estimated cost) from the priority queue, the algorithms efficiently explore the search space. This ensures that the most optimal path is discovered without wasting computational resources exploring less promising routes. For drones, this translates directly into finding the shortest, safest, or most energy-efficient flight path while avoiding obstacles, flying through no-fly zones, or adhering to specific flight corridor restrictions. The logarithmic time complexity of priority queue operations allows these algorithms to quickly process vast numbers of potential path segments, enabling real-time navigation in dynamic scenarios.
Dynamic Route Planning
Beyond initial path generation, drones operating autonomously must also contend with dynamic environments. Obstacles may appear or disappear, weather conditions can change, or mission parameters might be updated mid-flight. In such scenarios, a pre-computed static path is insufficient. Dynamic route planning, which allows drones to adapt their trajectories in real-time, relies heavily on the same principles.
When a drone’s sensors detect a new obstacle or a previously clear path becomes blocked, the navigation system must swiftly re-evaluate its current trajectory. The existing pathfinding algorithm, using its integrated priority queue, can be re-run or incrementally updated to find a new optimal segment from the drone’s current position to the destination. The priority queue facilitates this by quickly prioritizing new valid path segments or reprioritizing existing ones based on updated environmental data. This rapid re-planning capability is fundamental to ensuring safety, mission success, and the overall robustness of autonomous drone operations, making advanced features like “AI Follow Mode” and proactive obstacle avoidance truly effective.
Enhancing Real-time Task Management and AI
The advanced capabilities of modern drones, from stable flight to sophisticated AI-driven features, are underpinned by meticulously managed computational resources. Priority queues are indispensable in optimizing these resources, particularly in real-time operating systems and complex AI decision-making processes.
Real-time Operating Systems (RTOS) for Drones
Every modern drone’s flight controller runs on a Real-time Operating System (RTOS). An RTOS is specifically designed to execute tasks with strict timing constraints, ensuring that critical operations are performed within their deadlines. For a drone, these critical tasks include reading sensor data (from IMUs, GPS, altimeters), executing motor commands, maintaining stability, and managing communication links. Any delay in these tasks could lead to instability, loss of control, or mission failure.
Within an RTOS, priority queues are used by the scheduler to manage the execution order of various processes and threads. Each task is assigned a priority based on its importance to flight stability and safety. For instance, motor control loops and immediate sensor data processing will have the highest priorities, ensuring they are executed with minimal latency. Less critical tasks, such as logging flight data to an SD card, transmitting telemetry updates, or processing non-essential background diagnostics, will have lower priorities. The RTOS scheduler uses a priority queue to always select the highest-priority ready task for execution, preempting lower-priority tasks if necessary. This robust task management system, driven by priority queues, is what enables drones to respond instantly to commands, maintain stable flight even in turbulent conditions, and operate reliably in diverse environments.
AI Decision-Making and Resource Allocation
As drones become more intelligent, incorporating features like AI Follow Mode, object recognition, and autonomous decision-making, the complexity of managing their computational resources skyrockets. These AI algorithms often involve multiple concurrent processes, each with varying computational demands and real-time requirements.
Consider a drone operating with AI Follow Mode. It needs to continuously process video feeds for object detection and tracking (high priority for smooth tracking), simultaneously run pathfinding algorithms for maintaining a safe distance and trajectory (also high priority), and perhaps in the background, update a local map of the environment (lower priority). A priority queue can effectively manage these competing demands. It ensures that the most critical AI tasks—those directly impacting immediate safety, control, or primary mission objectives—receive CPU cycles and memory allocations ahead of less urgent computations.
Furthermore, in multi-sensor fusion for AI, different sensor inputs might need to be processed with varying priorities. For example, LiDAR data indicating an immediate collision threat would take precedence over a minor visual anomaly in a secondary camera feed. Priority queues provide the mechanism to prioritize these data streams and the subsequent AI inferences, allowing drones to make swift, informed decisions, manage risks effectively, and operate autonomously in increasingly complex scenarios without being overwhelmed by the sheer volume of data and processing tasks.
Data Processing and Resource Allocation in Advanced Drone Systems
Beyond core flight control and AI decision-making, priority queues also play a crucial role in optimizing data processing and resource allocation in advanced drone systems, particularly those involved in mapping, remote sensing, and collaborative operations. The sheer volume and diversity of data collected by modern drones necessitate intelligent management strategies.
Efficient Sensor Data Handling
Drones equipped for mapping or remote sensing often carry multiple sophisticated sensors, including high-resolution cameras, LiDAR scanners, thermal cameras, and hyperspectral imagers. Each sensor generates a continuous stream of data, and not all data points are equally critical at all times. For example, during an autonomous mapping mission, the system might prioritize LiDAR data for immediate terrain reconstruction and obstacle avoidance, while high-resolution photographic data for later detailed photogrammetry might be processed at a slightly lower priority.
A priority queue can be employed to manage the incoming sensor data buffers. Data packets or processing tasks related to immediate navigation and safety (e.g., proximity sensor readings) would be assigned the highest priority, ensuring minimal latency. Data crucial for real-time mission objectives (e.g., initial survey scans) would receive a high priority. In contrast, data intended for post-processing or less urgent background tasks (e.g., ambient light measurements for white balance adjustments) would be assigned lower priorities. This intelligent prioritization, orchestrated by priority queues, ensures that the drone’s computational resources are always directed towards the most critical data first, preventing bottlenecks and ensuring that critical information is always available when needed, contributing to the accuracy and efficiency of mapping and remote sensing applications.
Multi-Drone Coordination
In scenarios involving drone swarms or collaborative multi-drone missions, coordination and communication become incredibly complex. Priority queues can be leveraged to manage inter-drone communication, task allocation, and resource sharing efficiently. When multiple drones are operating in concert, they need to exchange information, coordinate movements, and assign tasks dynamically.
Consider a swarm mapping a large area: if one drone detects a critical anomaly or requires assistance, its communication broadcast might be assigned a higher priority than routine status updates from other drones. A central coordination system, or even individual drones, could use priority queues to process incoming messages, task requests, or emergency signals from other swarm members. This ensures that critical commands, urgent warnings, or requests for help are processed immediately, allowing for rapid, coordinated responses. Similarly, in dynamic task allocation, if new high-priority objectives arise, the task manager, utilizing a priority queue, can quickly assign these to available drones, ensuring mission flexibility and adaptability in complex, multi-agent environments.
Future Implications and Development
The foundational role of priority queues in current drone technology hints at even more profound applications in the future. As drones evolve towards greater autonomy, more sophisticated AI, and integration into complex aerial ecosystems, the efficiency and intelligence afforded by priority queues will become even more critical.
Towards More Sophisticated Autonomy
Future drones will likely operate with even higher degrees of cognitive autonomy, requiring them to manage uncertainty, learn from experience, and perform complex reasoning in highly dynamic environments. Priority queues will continue to be instrumental in these advanced cognitive architectures. They will facilitate the prioritization of learning objectives, the scheduling of complex inference tasks, and the efficient management of internal “thought processes” that guide truly autonomous decision-making. As drones move beyond reactive responses to proactive and predictive behaviors, the ability to prioritize potential outcomes, analyze risks, and schedule preventative actions will be paramount. Priority queues will enable these systems to weigh conflicting goals and objectives, ensuring that the drone’s actions are always aligned with the highest-priority mission parameters or safety protocols, leading to more robust and reliable autonomous operations in unpredictable scenarios.
Research and Optimization
The ongoing advancements in computer science and hardware design continue to refine the utility of priority queues. Research into more efficient priority queue implementations, particularly those optimized for parallel processing or specialized hardware accelerators, holds significant promise for future drone technology. As drones are increasingly equipped with powerful edge computing capabilities, offloading priority queue operations to dedicated hardware could dramatically reduce latency and power consumption, enabling even more complex real-time AI and autonomous functions. Furthermore, novel data structures derived from or inspired by priority queues may emerge, offering even greater efficiency for specific drone applications, such as managing massive streams of sensor data from next-generation perception systems or coordinating vast swarms of interconnected UAVs. The continuous evolution of these fundamental data structures will thus remain a quiet but crucial enabler for the relentless pace of innovation in drone technology.