The seemingly simple question of “what’s the difference between series and parallel” holds profound implications across numerous technological domains. While often associated with basic electrical circuits, the fundamental principles governing series and parallel configurations extend far beyond Ohm’s Law and into the intricate workings of modern drone technology. For drone enthusiasts and professionals alike, understanding these concepts is not just academic; it’s crucial for optimizing power delivery, ensuring reliable sensor operation, and even enhancing the very capabilities of the unmanned aerial vehicles we rely on.
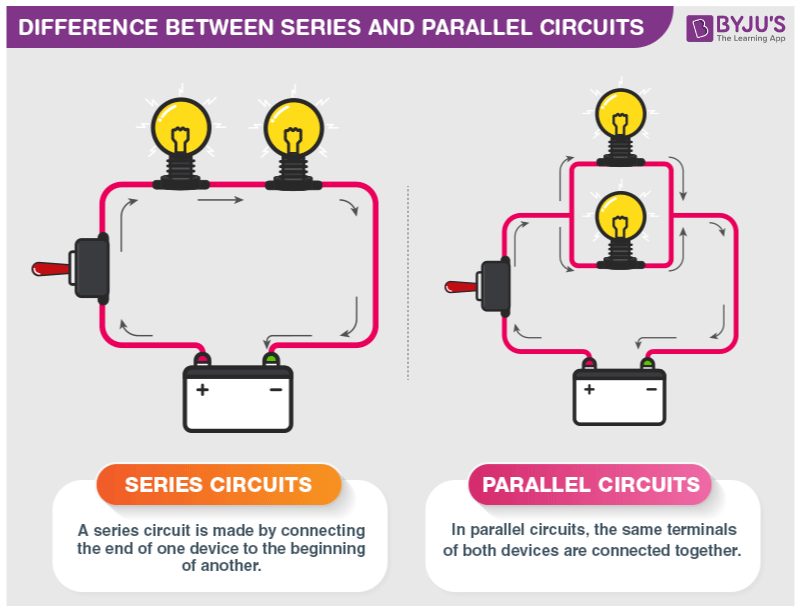
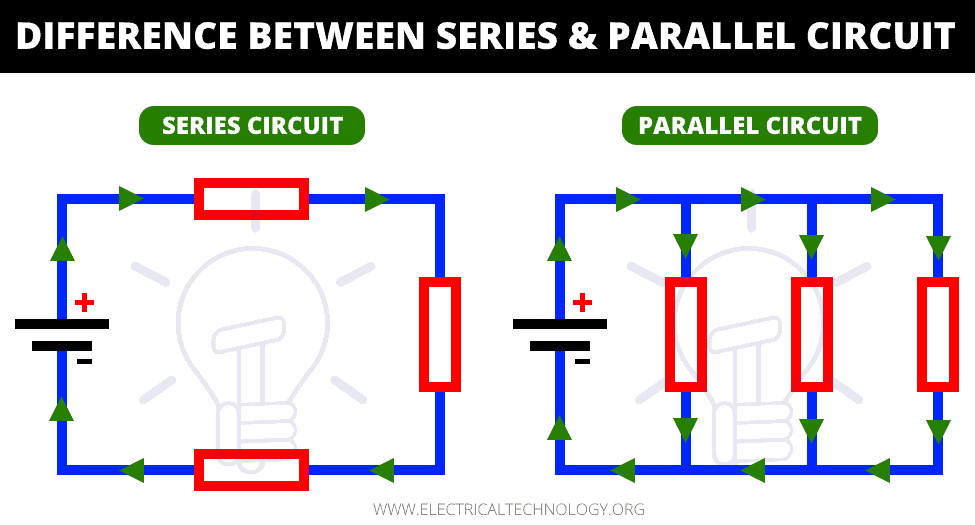
At its core, the distinction between series and parallel lies in how components are connected within a system, dictating the flow of electricity, data, or even operational pathways. In a series connection, components are arranged in a single line, forming a continuous loop. This means that any electrical current must pass through each component sequentially. Conversely, in a parallel connection, components are connected across each other, providing multiple independent pathways for the current to flow. This fundamental difference profoundly impacts voltage, current, resistance, and ultimately, the performance and resilience of the system.

For the world of drones, these concepts are not just theoretical curiosities. They are the backbone of how batteries are managed, how sensors communicate, and how flight controllers interpret data. Whether you’re a hobbyist building a custom racing drone, a professional cinematographer planning an aerial shoot, or an engineer developing next-generation autonomous systems, a firm grasp of series and parallel configurations will empower you to make informed decisions, troubleshoot effectively, and push the boundaries of what’s possible with UAVs.
Understanding Series Connections in Drone Technology
In the context of drone technology, series connections are fundamentally about building upon existing capabilities or increasing power output by chaining components together. This approach offers a straightforward method for achieving higher voltage or creating a sequential flow of operations. However, it also introduces specific vulnerabilities that must be carefully considered during the design and maintenance phases.
Series Battery Configurations: Boosting Voltage
One of the most common applications of series connections in drones is in battery packs. Drones often require specific voltage levels to operate their motors, flight controllers, and onboard electronics. To achieve higher voltages than what a single cell can provide, multiple cells are connected in series.
How Series Battery Packs Work
When two or more battery cells are connected in series, their voltages add up. For example, if you have two 3.7V LiPo cells, connecting them in series will result in a nominal voltage of 7.4V. Three such cells in series would yield 11.1V, and four would provide 14.8V. This is why LiPo batteries are often referred to by their cell count, such as “3S” for a 3-cell series pack or “4S” for a 4-cell pack.
Advantages of Series Battery Packs
The primary advantage of a series battery configuration is increased voltage. Higher voltage allows motors to spin faster, leading to greater thrust and potentially higher flight speeds and endurance. It also enables the use of more powerful motors and electronics that are designed to operate at these higher voltages. For racing drones, where speed and agility are paramount, higher voltage packs are often essential.
Disadvantages and Considerations for Series Battery Packs
Despite the benefits, series battery configurations have inherent drawbacks. The most significant is that if any single cell in the series goes bad, the entire pack effectively fails. This is because the circuit is broken, and current cannot flow. This also means that a faulty cell can over-discharge, potentially damaging it permanently. Monitoring the voltage of individual cells, often through a battery management system (BMS) or a dedicated cell checker, is crucial for maintaining the health of series battery packs. Furthermore, charging series battery packs requires specialized chargers that can balance the voltage of each individual cell to prevent overcharging or undercharging, which can lead to reduced lifespan and safety hazards.
Series Sensor Integration: Sequential Data Flow
While less common than in battery configurations, series connections can also be conceptually applied to how certain sensors might interact or report data in a cascaded fashion.
Cascading Sensor Readings
Imagine a scenario where one sensor’s output is used as an input for another. For example, a barometric pressure sensor might provide an altitude reading, and this altitude data could then be fed into a system that adjusts the gain of a radar altimeter. In this conceptual “series,” the altitude information flows sequentially, with each stage processing or building upon the previous one.
Limitations in Drone Systems
In modern drones, direct series connections for data processing between sensors are rare due to the efficiency and robustness of parallel processing architectures within flight controllers. However, understanding the principle of sequential data dependency is useful for diagnosing issues where a problem with an upstream component might cascade and affect downstream readings.
Exploring Parallel Connections in Drone Technology
Parallel connections are vital for enhancing the reliability, redundancy, and distributive capabilities within a drone system. Unlike the single, unbroken chain of a series connection, parallel configurations offer multiple paths, allowing for greater resilience and the simultaneous operation of various components.
Parallel Battery Configurations: Increasing Capacity
While series connections boost voltage, parallel connections are primarily used to increase the overall energy capacity of a battery pack.
How Parallel Battery Packs Work
When battery cells are connected in parallel, their positive terminals are linked together, and their negative terminals are linked together. This results in the voltage remaining the same as a single cell, but the ampere-hour (Ah) capacity is added. For instance, two 3.7V cells with a capacity of 2000mAh each, connected in parallel, will still provide 3.7V but will have a combined capacity of 4000mAh. This is often denoted as “2S2P” for a pack with two cells in series, and then two of those series sets connected in parallel, resulting in a higher voltage and higher capacity.
Advantages of Parallel Battery Packs
The key advantage of parallel battery configurations is increased flight time or operational duration. By providing more total energy, a drone can fly for longer or carry heavier payloads for extended periods. This is particularly important for commercial applications such as aerial surveying, delivery services, and industrial inspections. Additionally, if one cell in a parallel configuration fails, the others can often continue to power the drone, providing a degree of redundancy.
Disadvantages and Considerations for Parallel Battery Packs
The main disadvantage is that the voltage of the pack is limited by the voltage of the individual cells. If a higher voltage is required, parallel connections are typically combined with series connections (e.g., a 4S2P battery). A critical consideration for parallel battery packs is ensuring that all cells are at a similar state of charge before connecting them. Connecting cells with significantly different voltages can lead to a rapid discharge from the higher-voltage cell to the lower-voltage one, potentially causing damage and safety issues. Proper battery management systems are crucial for monitoring and equalizing the charge of parallel-connected cells.
Parallel Sensor Networks: Redundancy and Diversity
The true power of parallel connections shines in how they enable redundancy and diversity in sensor systems, a cornerstone of modern drone reliability and advanced functionality.
Redundant Sensor Systems
Many critical drone systems employ redundant sensors connected in parallel to enhance reliability. For instance, a drone might have two identical GPS modules. If one module fails or provides erroneous data, the flight controller can rely on the data from the second module, ensuring continued navigation. This parallel redundancy significantly reduces the risk of mission failure due to a single sensor malfunction.
Diverse Sensor Inputs
Beyond simple redundancy, parallel connections allow for the integration of diverse sensor types that provide complementary information. A drone might have a visual camera for navigation and obstacle detection, a thermal camera for specialized imaging, and a LiDAR sensor for precise mapping. These sensors operate independently but feed their data into the flight controller’s processing unit in parallel, allowing for sophisticated data fusion and a more comprehensive understanding of the environment. This parallel data acquisition enables advanced features like AI-powered object recognition, autonomous flight planning, and real-time environmental monitoring.
Parallel Communication Buses
In complex drone architectures, various components and sensors communicate with the flight controller via parallel communication buses. These buses allow multiple devices to transmit data simultaneously, increasing the overall data throughput and responsiveness of the system. Protocols like I2C and SPI, commonly used in drone electronics, often operate in a manner that facilitates parallel data exchange between the flight controller and its peripherals.
The Synergy of Series and Parallel in Advanced Drone Systems
The distinction between series and parallel is not always a strict either/or proposition. In fact, the most advanced and capable drone systems often leverage a sophisticated synergy of both configurations to achieve optimal performance, resilience, and functionality. This integration is key to pushing the boundaries of what drones can accomplish.
Hybrid Battery Architectures
Many high-performance drones utilize hybrid battery architectures that combine series and parallel connections to achieve both high voltage and high capacity.
Achieving High Voltage and Extended Flight Times
For example, a drone requiring a 14.8V (4S) power supply but needing extended flight times might employ a battery pack with four cells in series to achieve the desired voltage, and then connect two such series sets in parallel (a 4S2P configuration). This provides the necessary voltage for powerful motors while also doubling the overall energy capacity, leading to significantly longer flight durations. This approach is common in professional cinema drones and larger industrial UAVs.
Distributed Redundancy in Flight Control Systems
Redundancy is a critical aspect of flight control, and parallel connections are fundamental to achieving it.
Multiple Processing Units
Modern flight controllers often feature multiple processing units. These units can be configured to work in parallel, with each unit independently processing sensor data and control commands. If one processing unit fails, the others can take over, ensuring that the drone maintains stable flight. This is akin to having multiple brains working in tandem, with a backup system ready to step in.
Redundant Communication Pathways
Similarly, critical communication pathways within the drone can be established in parallel. For instance, a drone might have both a primary radio control link and a redundant telemetry link. If the primary link experiences interference, the drone can continue to be controlled or monitored via the secondary link, providing a vital safety net.
Integrated Sensor Fusion Architectures
The ability to gather and process information from a multitude of sensors is what gives drones their intelligence. Parallel connections are the enabler of this sensor fusion.
Simultaneous Data Acquisition
As discussed earlier, connecting multiple sensors in parallel allows the flight controller to acquire data from all of them simultaneously. This real-time data stream is then fed into complex algorithms that fuse the information from different sensor types. For instance, a drone might use data from its visual camera, LiDAR, and IMU (Inertial Measurement Unit) all in parallel to create a highly accurate 3D map of its environment for autonomous navigation or precise landing.
Error Correction and Kalman Filtering
The parallel input of data from multiple sensors also facilitates advanced error correction techniques. Algorithms like the Kalman filter often rely on a continuous stream of data from various sources, weighting each input based on its perceived accuracy. The parallel nature of data acquisition allows these algorithms to effectively integrate and refine the drone’s understanding of its state and surroundings.
In conclusion, the concepts of series and parallel connections, though seemingly simple, are foundational to the design and operation of virtually every aspect of modern drone technology. From the power delivery systems that keep them airborne to the intricate sensor networks that grant them intelligence, understanding the differences, advantages, and limitations of these configurations is paramount for anyone looking to truly master the world of unmanned aerial vehicles. By intelligently applying these principles, engineers and enthusiasts alike can continue to innovate and unlock the ever-expanding potential of drone technology.