In the rapidly evolving landscape of autonomous flight and remote sensing, the intersection of aerospace engineering and high-level computing has never been more critical. As drones transition from simple remotely piloted vehicles to sophisticated autonomous agents, the operating systems powering them—predominantly Linux-based distributions—require robust tools for monitoring data flow. One such tool, frequently utilized by systems engineers and drone tech innovators, is the ss command.
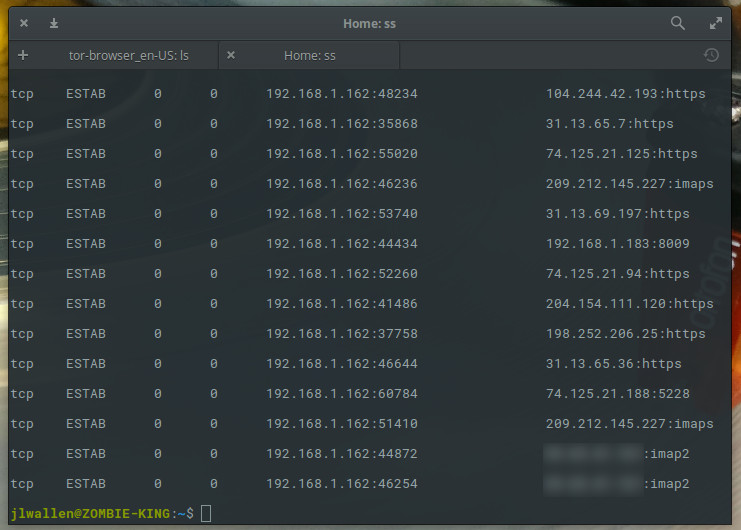
To answer the fundamental question: the Linux command “ss” stands for “Socket Statistics.”
While it may seem like a minor utility in a developer’s toolkit, “Socket Statistics” represents a vital component in the architecture of modern unmanned aerial vehicles (UAVs). For a drone to navigate autonomously, process AI-driven obstacle avoidance, or stream high-definition mapping data, it must manage a complex web of network connections. The ss command is the primary window into these connections.
Understanding “ss”: From Socket Statistics to Drone Connectivity
In the context of Tech & Innovation, the shift from older networking tools to “Socket Statistics” marks a significant leap in efficiency. For years, the netstat utility was the standard for viewing network connections. However, as autonomous systems grew more data-intensive, the need for a faster, more descriptive tool became apparent.
The Transition from Netstat to Socket Statistics (ss)
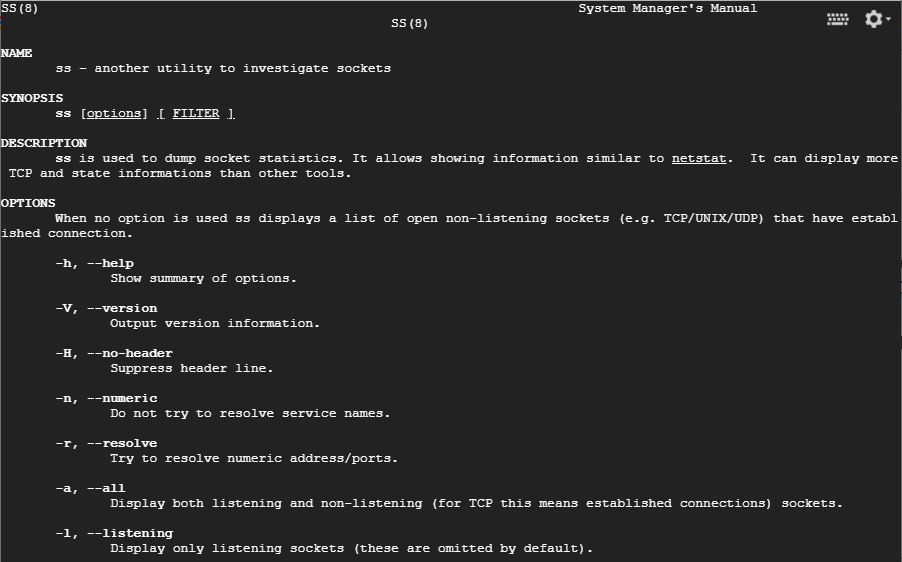
The ss command was introduced as part of the iproute2 package. In the world of drone technology, where onboard processing power is often limited by weight and battery constraints, efficiency is paramount. Unlike netstat, which reads from the /proc/net/ files—a slow process when dealing with thousands of connections—ss gathers information directly from kernel space.
For an autonomous drone running a real-time Linux kernel, this speed difference is not just a convenience; it is a necessity. When a drone is performing edge computing tasks, such as identifying a landing zone via AI, every millisecond of CPU cycle saved by efficient diagnostic tools can be redirected toward flight stability and sensory processing.
How “ss” Functions within an Onboard Drone OS
Drones like those utilizing the Robot Operating System (ROS) or running custom ArduPilot/PX4 stacks rely on “sockets” to pass information between different software nodes. A socket is an endpoint in a network communication flow. On a drone, you might have one socket handling GPS data, another for the inertial measurement unit (IMU), and yet another for the long-range telemetry link.
By using “Socket Statistics,” engineers can verify that these communication channels are open and functioning. If a drone’s AI follow-mode starts lagging, the first thing a developer might check is the socket status to see if the buffer is overflowing or if the connection between the vision processing unit and the flight controller has been severed.
The Role of Socket Statistics in Autonomous Flight and Remote Sensing
Tech innovation in the drone sector is currently focused on autonomy and high-bandwidth data transmission. Whether it is a drone swarm coordinating a light show or an industrial UAV mapping a pipeline, the underlying network infrastructure must be flawless.
Managing Telemetry and MAVLink Communications
Telemetry is the lifeblood of autonomous flight. Most professional-grade drones use the MAVLink (Micro Air Vehicle Link) protocol to send status updates and receive commands. These packets move over UDP (User Datagram Protocol) sockets.
Using ss -u, a technician can monitor these UDP sockets in real-time. This is crucial during the testing phase of new autonomous flight algorithms. If the “Socket Statistics” show a high number of dropped packets or an inactive port, the drone might lose its “Heartbeat” signal, triggering an emergency “Return to Home” (RTH) sequence. Innovation in this space depends on the ability to maintain these “invisible wires” that connect the drone to its ground control station (GCS).
Optimizing Real-Time Data Transmission for Mapping
Remote sensing drones, equipped with LiDAR or multispectral sensors, generate massive datasets that often need to be streamed to a local server or cloud interface for real-time analysis. This requires a robust TCP connection.
The ss command allows innovators to inspect the “congestion window” of these transmissions. If a mapping drone is flying at the edge of its Wi-Fi or LTE range, the ss utility provides detailed statistics about the TCP handshake and data throughput. By analyzing these socket statistics, engineers can optimize their data-compression algorithms, ensuring that critical mapping data is prioritized over non-essential diagnostic logs.
Troubleshooting UAV Network Latency Using the “ss” Command
In the realm of autonomous flight, latency is the enemy. A delay of half a second in an AI Follow Mode could result in a drone colliding with a tree or losing its subject. Understanding the internal networking of the drone via the ss command is the key to minimizing this lag.
Identifying Bottlenecks in FPV and AI Processing
Modern drones often use “offboard” processing, where the heavy lifting of AI calculations is done on a powerful companion computer (like a Jetson Nano or Raspberry Pi) mounted on the frame. This computer communicates with the flight controller via a serial-to-socket bridge.
If there is a delay in the AI’s “obstacle detected” signal reaching the flight controller, the developer will use ss -p to identify which processes are using which sockets. This allows them to see if another background process—perhaps a log-uploading service—is hogging the bandwidth. By managing socket statistics, innovators can ensure that the “Path Planning” node always has the clearest path to the “Actuator” node.
Security Auditing of Autonomous Flight Systems
As drones become more integrated into the National Airspace System, security is a major focus of tech innovation. A drone is essentially an IoT (Internet of Things) device, and any open socket is a potential entry point for unauthorized access.
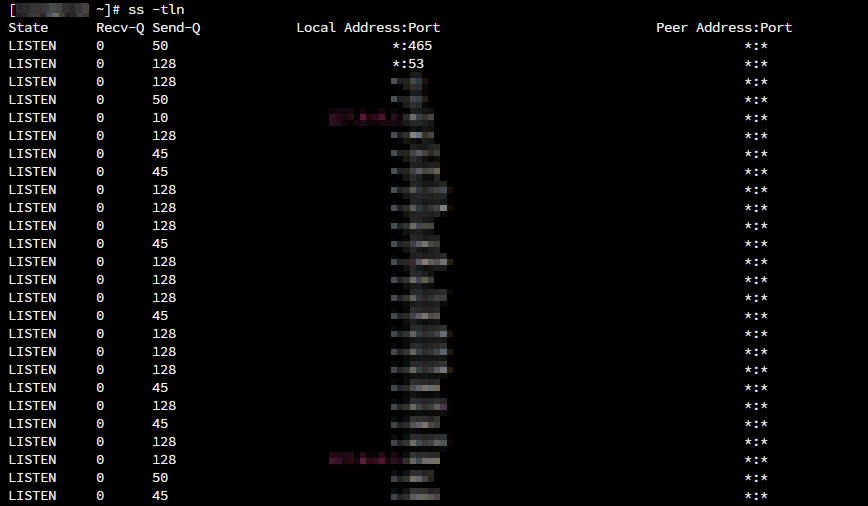
The ss -l command (which lists listening sockets) is a standard tool for drone cybersecurity. It allows developers to ensure that the drone is not “listening” for connections on ports that aren’t necessary for the mission. For instance, if a remote sensing drone has an open SSH port exposed to a public LTE network, it poses a significant risk. Socket Statistics provide the transparency needed to lock down these autonomous systems against hacking.
Future Innovations: Linux Networking in Swarm Intelligence and Edge Computing
The future of drone technology lies in “Swarm Intelligence”—the ability for multiple drones to communicate with one another to achieve a shared goal. This requires a level of networking complexity that was unheard of in aviation just a decade ago.
Socket Management in Multi-Drone Coordination
In a drone swarm, each unit acts as a node in a mesh network. They must constantly exchange position, velocity, and intent data to avoid collisions and maintain formation. This creates a “web” of sockets.
Innovators are currently working on autonomous systems that can dynamically open and close sockets based on the proximity of other drones. Using the concepts behind “Socket Statistics,” these systems can monitor the health of the mesh network. If one drone’s “ss” output shows a failing socket to its neighbor, the swarm’s AI can automatically reroute data through another drone, ensuring the mission continues uninterrupted.
The Evolution of High-Bandwidth Drone Networking
With the rollout of 5G and satellite-based internet (like Starlink) for UAVs, the volume of data being moved by drones is set to explode. We are moving toward a world where drones will perform “Edge Computing,” processing 8K video feeds locally and only sending the “metadata” (like the location of a detected object) to the user.
The Linux ss command will remain a foundational tool in this era. As we push the boundaries of what drones can do—from autonomous urban air mobility (flying taxis) to long-range environmental sensing—the ability to monitor “Socket Statistics” will be the difference between a successful mission and a catastrophic failure.
In conclusion, while “ss” stands for “Socket Statistics” in the world of Linux, in the world of Drone Tech & Innovation, it stands for something much greater: the visibility and control required to make autonomous flight a safe, efficient, and reliable reality. Understanding the data flow at the socket level is what allows us to move from simple radio-controlled toys to the complex, intelligent aerial robotics of the future.