The realm of drone technology, particularly in the sophisticated applications of flight technology, often encounters terms that, while fundamental to computing and logic, hold significant implications for how our unmanned aerial vehicles (UAVs) operate and interact with their environment. One such fundamental concept is the Exclusive OR, or XOR. While not a physical component one can point to on a drone, XOR is a logical operation that underpins much of the decision-making, data processing, and communication that enables advanced drone functionalities. Understanding XOR is key to appreciating the elegance and efficiency behind complex aerial systems, from navigation and stabilization to communication protocols and intelligent flight modes.

The Logical Foundation of XOR
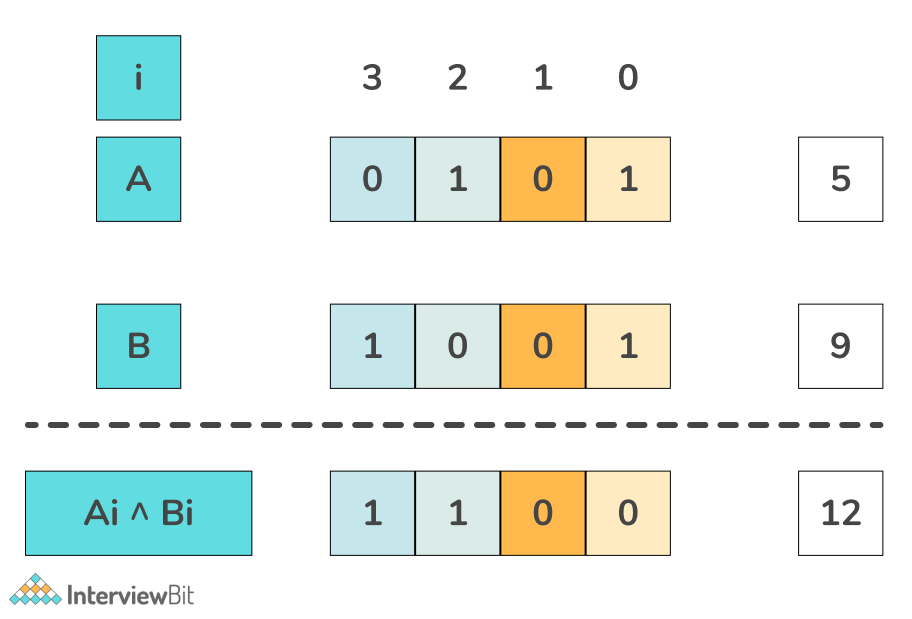
At its core, XOR is a binary logical operation. It takes two inputs, typically represented as bits (0 or 1), and produces a single output. The defining characteristic of XOR is that it returns a 1 (true) if and only if the two inputs are different. If the inputs are the same, it returns a 0 (false). This is in contrast to the OR operation, which returns 1 if at least one of the inputs is 1, and the AND operation, which returns 1 only if both inputs are 1.
Let’s illustrate this with a simple truth table:
| Input A | Input B | A XOR B |
|---|---|---|
| 0 | 0 | 0 |
| 0 | 1 | 1 |
| 1 | 0 | 1 |
| 1 | 1 | 0 |
The “exclusive” nature of XOR means that it’s true when one input is true, but not both, and not neither. This “either/or, but not both” logic is remarkably powerful and finds numerous applications in digital systems, including those powering our drones.
Bitwise Operations and Data Representation
In the context of drone flight technology, data is constantly being processed in binary form. Sensor readings, navigation commands, communication packets – all are ultimately represented as sequences of bits. The XOR operation can be applied bitwise to these sequences, meaning it operates on each corresponding pair of bits in two different data words.
For instance, if we have two 8-bit data words:
10110010
01100110
Performing a bitwise XOR would yield:
10110010
XOR
01100110
----------
11010100
Each bit in the result is the XOR of the corresponding bits in the input words. This bitwise operation is fundamental to many low-level computing tasks and is highly efficient, making it ideal for resource-constrained embedded systems often found in drones.
XOR in Drone Navigation and Stabilization
The precise and stable flight of a drone is a marvel of engineering, relying on a continuous stream of data from various sensors and sophisticated algorithms. XOR plays a subtle but crucial role in several aspects of this process.
Sensor Data Fusion and Validation
Drones are equipped with a suite of sensors: IMUs (Inertial Measurement Units, including accelerometers and gyroscopes), barometers, magnetometers, GPS modules, and sometimes optical flow sensors or LiDAR. To achieve accurate positioning and orientation, data from these sensors must be fused and cross-validated.
Consider a scenario where a drone receives GPS data and IMU data to determine its position and velocity. While direct comparisons might not always be straightforward due to different data types and resolutions, XOR can be used in data integrity checks and error detection. For example, if two independent systems are calculating the same value (e.g., a velocity component), their results can be XORed. If the result is zero, it implies the values are identical, suggesting high confidence. If the result is non-zero, it indicates a discrepancy that warrants further investigation or flagging. This is a simplified illustration, as real-world data fusion involves complex algorithms, but XOR’s ability to highlight differences efficiently is valuable.
Error Detection and Correction Codes
In any digital communication or data storage, the possibility of errors exists. These can be caused by electrical interference, noise on communication channels, or hardware malfunctions. XOR is a fundamental building block for many error detection and correction (EDC) codes, such as parity checks and cyclic redundancy checks (CRCs).
A simple parity check involves XORing all the bits in a data word. If the result is 1, the parity is odd; if 0, it’s even. This single bit can detect if an odd number of bits have flipped during transmission or storage. While basic, this principle extends to more complex EDC schemes that can not only detect errors but also correct them. For drone communication, especially in noisy environments or over long distances, ensuring data integrity is paramount for safe operation. Data packets containing critical commands or sensor readings often have parity or CRC checks appended, calculated using XOR operations, to verify their accuracy upon reception.
State Management and Mode Switching
Drones operate in various modes: manual flight, GPS hold, return-to-home, waypoint navigation, and advanced autonomous functions. Managing these states and ensuring smooth transitions between them relies on logical comparisons and state machines. XOR can be employed in determining if a new state is sufficiently different from the current state to warrant a transition or to detect unintended state changes.
For instance, if a drone’s current flight mode is represented by a set of bits, and an incoming command attempts to change a specific parameter. XORing the relevant bits of the current state with the proposed new state can quickly reveal which aspects are changing. This can be part of the logic that validates whether a mode switch is permissible or if certain conditions must be met first.
XOR in Drone Communication Protocols
Reliable communication between the drone and its ground control station (GCS) or other networked drones is vital. This communication often uses complex protocols that ensure data is transmitted accurately and securely. XOR’s role here is multifaceted, contributing to both data integrity and encryption.
Data Encryption and Authentication
While modern drone communication might employ more sophisticated encryption algorithms, XOR has historically been, and can still be, a component in simpler forms of encryption, sometimes referred to as stream ciphers. A simple XOR cipher involves XORing the plaintext data with a “key” (another sequence of bits). The same key is then used to XOR the ciphertext to recover the original plaintext.
Plaintext XOR Key = Ciphertext
Ciphertext XOR Key = Plaintext
This is a very basic form of encryption and is vulnerable if the key is known or weak. However, XOR’s speed makes it suitable for real-time applications where computational power is limited. In more advanced schemes, XOR might be used in conjunction with other cryptographic primitives for hashing or authentication purposes. For example, XORing a message with a secret key and then hashing the result can provide a basic form of authentication.
Message Synchronization and Framing
In serial communication, drones and GCSs often exchange data in packets. These packets need to be correctly identified and synchronized. XOR can be used in framing mechanisms. For example, a unique bit pattern might be used as a start and end marker for a data frame. Within the data payload, XOR checksums can verify the integrity of the data between these markers.
Furthermore, in multi-drone systems or when communicating with multiple ground control stations, XOR can be used in addressing or identifying specific units. By XORing a base address with a unit identifier, unique addresses can be generated efficiently.
XOR in Advanced Drone Technologies
As drones evolve towards greater autonomy and intelligence, the underlying logic becomes increasingly sophisticated. XOR, as a fundamental logical operator, continues to be relevant.
Autonomous Flight Path Planning
Autonomous flight involves complex algorithms for pathfinding, obstacle avoidance, and mission execution. When planning a path, a drone might evaluate multiple potential routes. Each route can be represented by a series of waypoints or parameters. XOR can be used in comparing different route options or in checking if a planned segment deviates significantly from an expected trajectory.
Imagine a scenario where a drone is generating a path around a complex obstacle. The drone might have a set of “ideal” path segments and compare them to the “actual” calculated path segments. XORing the bit representations of these parameters can quickly highlight deviations. If the XOR result is consistently zero for a segment, it means the calculated path is precisely matching the ideal, which might be undesirable if it means the drone is not avoiding an obstacle. If the XOR result is non-zero, it indicates a deviation, which can then be further analyzed to ensure it’s a safe avoidance maneuver.
AI-Powered Features and Data Processing
Features like AI Follow Mode, object recognition, and environmental mapping all rely on sophisticated data processing. Machine learning models, often implemented on embedded AI chips within drones, perform vast numbers of logical operations. While the AI models themselves are complex neural networks, the underlying computations often involve bitwise operations, including XOR, for efficiency.
For example, in certain types of feature matching or image comparison algorithms used for AI tasks, XOR can be employed to quickly identify differing pixels or feature descriptors. If two images are largely identical, XORing them will result in a sparse output (mostly zeros), indicating high similarity. This can be a quick initial check before more computationally intensive comparison methods are applied.
Sensor Redundancy and Failover Systems
For critical applications, drones often employ redundant sensors. If one sensor fails, a backup can take over. XOR can be part of the logic that detects a failure in a primary sensor. By comparing the output of a primary sensor with a secondary (redundant) sensor, a discrepancy highlighted by XOR can trigger a failover to the backup.
Consider two IMUs providing pitch angle data. If the readings from IMU A and IMU B are normally very close, their XORed result will be close to zero. If IMU A starts producing erroneous data, its readings will diverge significantly from IMU B, resulting in a non-zero XOR output. This deviation can be monitored, and if it exceeds a certain threshold, the system can be programmed to rely solely on IMU B or initiate other diagnostic procedures.

Conclusion
The XOR gate, a fundamental concept in digital logic, is far more than just an abstract theoretical tool. Within the sophisticated architecture of modern drones, it serves as a silent, efficient engine driving critical functionalities. From ensuring the integrity of sensor data and communication packets to enabling complex autonomous navigation and AI-driven decision-making, XOR’s ability to precisely identify differences is invaluable. As drone technology continues its rapid advancement, the elegant simplicity and powerful utility of the XOR operation will undoubtedly remain an essential element in the ongoing innovation of aerial systems, ensuring they fly safer, smarter, and more reliably.