In the rapidly evolving landscape of high-performance networking and autonomous systems, Vector Packet Processing (VPP) has emerged as a cornerstone technology for handling massive data throughput with unprecedented efficiency. As drones transition from simple remotely piloted vehicles to sophisticated autonomous nodes in the Internet of Things (IoT), the underlying networking infrastructure must evolve. For technologies like remote sensing, real-time mapping, and AI-driven autonomous flight, the ability to process data packets at line rate is not just a luxury—it is a requirement. VPP provides the framework necessary to move beyond the limitations of traditional networking stacks, offering a scalable, modular, and high-speed solution for the next generation of aerial innovation.
Understanding the Architecture of VPP
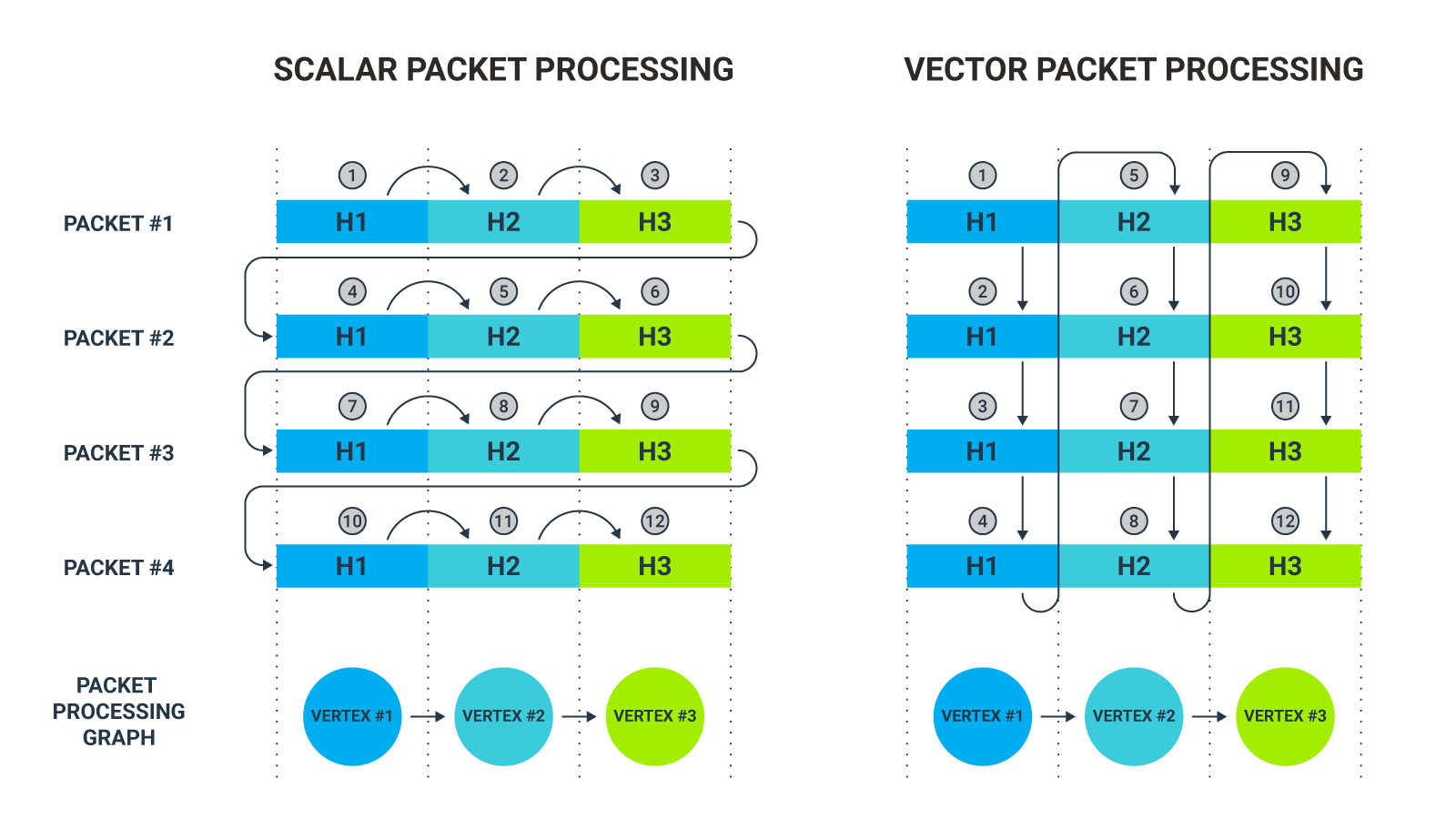
To understand what Vector Packet Processing is, one must first understand the limitations of traditional “scalar” packet processing. In a standard networking stack, packets are processed one at a time. The system receives a packet, moves it through the stack, applies the necessary protocols (routing, firewall, etc.), and then moves on to the next. While this works for low-bandwidth applications, it creates a massive bottleneck when dealing with the high-velocity data streams required for modern drone operations.
Scalar vs. Vector Processing: Breaking the Bottleneck
Scalar processing suffers from a phenomenon known as “thrashing” the instruction cache. Because the processor must fetch a new set of instructions for every single packet, it frequently experiences cache misses. This results in the CPU sitting idle while it waits for instructions to be retrieved from slower main memory.
VPP solves this by processing packets in “vectors.” Instead of handling one packet at a time, VPP collects a batch of packets—typically up to 256—and processes them as a single vector. By applying the same set of instructions to a whole batch of packets, VPP ensures that the instruction cache remains “warm.” The CPU fetches the instruction once, and it stays in the high-speed cache for the entire duration of the batch processing. This architectural shift results in a significant increase in packets per second (PPS) and a dramatic reduction in latency.
The Graph Node Architecture
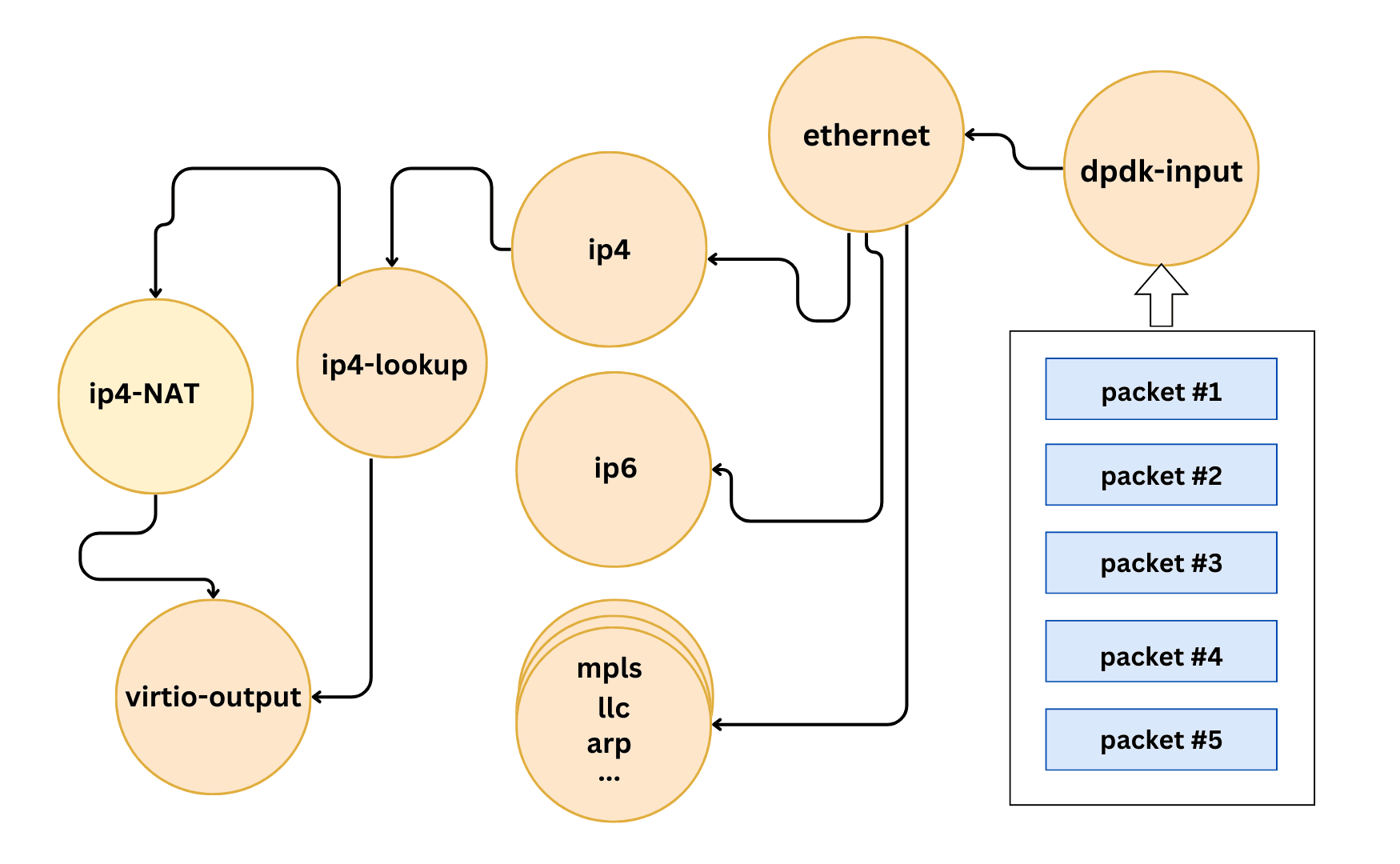
At the heart of VPP is a directed graph of nodes. Each node in the graph performs a specific function, such as IPv4 lookup, Ethernet encapsulation, or policing. When a vector of packets enters the system, it moves through the graph node by node. This modular approach allows for extreme flexibility. Developers can insert new nodes into the graph to handle custom protocols or specialized data processing tasks without disrupting the entire stack. For tech-focused drone platforms, this means custom telemetry or proprietary sensor data can be integrated into the networking layer with minimal overhead.
The Role of VPP in High-Speed Drone Data Transmission
The modern drone is essentially a flying data center. Between 4K video feeds, LiDAR point clouds, and multispectral sensors used in remote sensing, the volume of data generated is staggering. Transmitting this data back to a ground station or a cloud-based processing hub requires a networking stack that can handle heavy loads without introducing jitter or delay.
Optimizing Remote Sensing and LiDAR Data
Remote sensing applications rely on the integrity and speed of data transmission. When a drone is mapping a forest for carbon sequestration or inspecting a high-voltage power line, it generates millions of data points every second. VPP enables the drone’s onboard compute module or the ground-based edge gateway to process these data packets at near-hardware speeds using standard commodity CPUs.
By utilizing VPP, engineers can ensure that the “data pipeline” is never the limiting factor. The efficiency of vector processing means that more CPU cycles are available for the actual analysis of the data—such as identifying anomalies in a pipeline or calculating vegetation indices—rather than being wasted on the overhead of moving packets through a legacy kernel stack.
Supporting 5G and Ultra-Reliable Low-Latency Communications (URLLC)
The integration of 5G technology into the drone ecosystem is a game-changer for autonomous flight. 5G offers the promise of Ultra-Reliable Low-Latency Communications (URLLC), which is essential for beyond visual line of sight (BVLOS) operations. However, the benefits of 5G are negated if the networking software on either end of the connection is slow.
VPP is often used in the User Plane Function (UPF) of 5G networks. In a drone context, this means that the handoff between the drone’s cellular modem and the command-and-control (C2) link is handled with microsecond latency. This level of performance is critical for obstacle avoidance systems that rely on off-board processing, where every millisecond of delay increases the risk of a collision.
Enhancing Autonomous Flight through Efficient Networking
As we move toward a future where drones operate autonomously in complex urban environments, the “intelligence” of the drone depends on its ability to communicate. Autonomous flight is not just about local sensors; it is about shared situational awareness.
Real-Time Edge Computing for Aerial AI
AI-driven drones often utilize edge computing to process visual data for object recognition and navigation. VPP plays a vital role here by acting as the high-speed interconnect between the drone’s sensors and the AI inference engine. Because VPP runs in userspace (bypassing the traditional operating system kernel), it reduces the “context switching” overhead that typically slows down data transfer. This allows for a more fluid exchange of information between the camera system and the autonomous flight controller, enabling the drone to make split-second decisions based on real-time environmental data.
Swarm Intelligence and Inter-Drone Communication
The next frontier in drone innovation is swarm intelligence—multiple drones working in coordination to achieve a single goal, such as search and rescue or large-scale agricultural spraying. Swarm operations require constant inter-drone communication to maintain formation and avoid mid-air collisions.
In a swarm, the network is dynamic and highly decentralized. VPP’s ability to handle complex routing tables and high packet throughput makes it an ideal candidate for the mesh networks used in swarm technology. By ensuring that synchronization packets are delivered with minimal latency, VPP helps maintain the temporal alignment of the entire swarm, allowing dozens or even hundreds of drones to move as a single, cohesive unit.
Strategic Advantages for Drone Tech Developers
For companies developing advanced drone platforms, VPP offers more than just raw speed; it offers a strategic advantage in terms of development agility and cost-efficiency.
Modular Programmability and the Graph Node Plugin
One of the most powerful features of VPP is its plugin architecture. Developers can write their own graph nodes in C, allowing them to implement proprietary features directly into the packet processing path. For example, a developer focusing on secure remote sensing could create a custom encryption node that is optimized for the specific hardware acceleration available on their drone’s onboard processor. This modularity ensures that the networking stack can grow and adapt as the mission requirements evolve, without the need for a complete system overhaul.
Cost-Efficiency and Hardware Abstraction
Historically, achieving line-rate packet processing required expensive, specialized hardware like ASICs (Application-Specific Integrated Circuits) or FPGAs (Field-Programmable Gate Arrays). While effective, these components are costly to design and difficult to program.
VPP changes this dynamic by delivering ASIC-like performance on general-purpose processors (CPUs) like those from Intel, AMD, or ARM. For the drone industry, this is revolutionary. It allows manufacturers to use standard, off-the-shelf compute modules to handle sophisticated networking tasks. This reduces the bill of materials (BOM) for the drone while simultaneously making the system easier to update and maintain through software-defined networking (SDN) principles.
The Future Landscape: VPP as the Foundation for Next-Gen Aerial Innovation
Looking forward, the role of Vector Packet Processing in the drone industry will only expand. As we integrate more sensors, higher-resolution imaging, and more complex AI models into our aerial platforms, the demand for high-performance networking will skyrocket.
We are moving toward a world of “Software-Defined Drones,” where the capabilities of the aircraft are defined more by its code than its carbon fiber frame. In this world, VPP acts as the nervous system, ensuring that every bit of data—from the smallest telemetry update to the largest 8K video stream—is delivered with maximum efficiency and minimum delay.
By adopting VPP, the tech and innovation sectors of the drone industry are building a foundation that can support the weight of future advancements. Whether it is enabling the safe integration of drones into the national airspace through real-time Remote ID and tracking, or facilitating the massive data transfers required for global mapping projects, Vector Packet Processing is the engine driving the networking revolution in the skies. It is a testament to how architectural innovation in the digital realm can directly translate to safer, more capable, and more intelligent autonomous systems in the physical world.