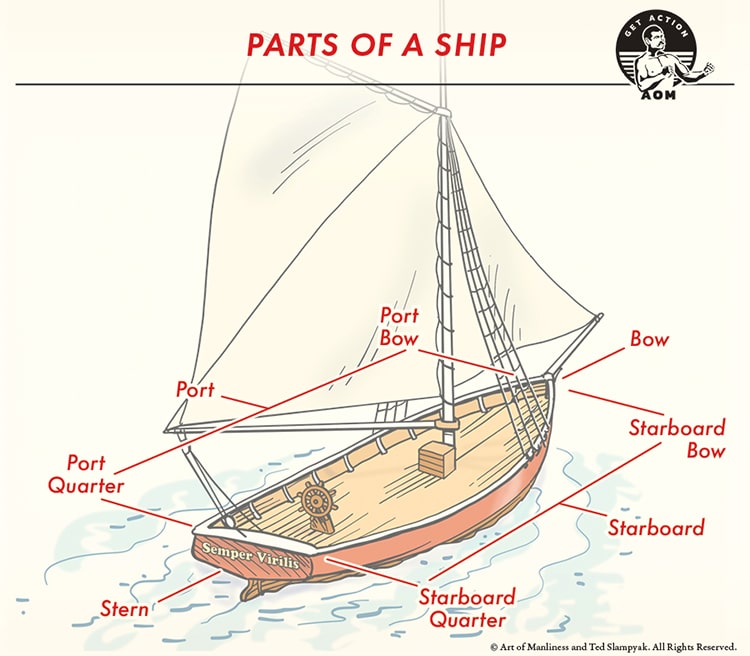
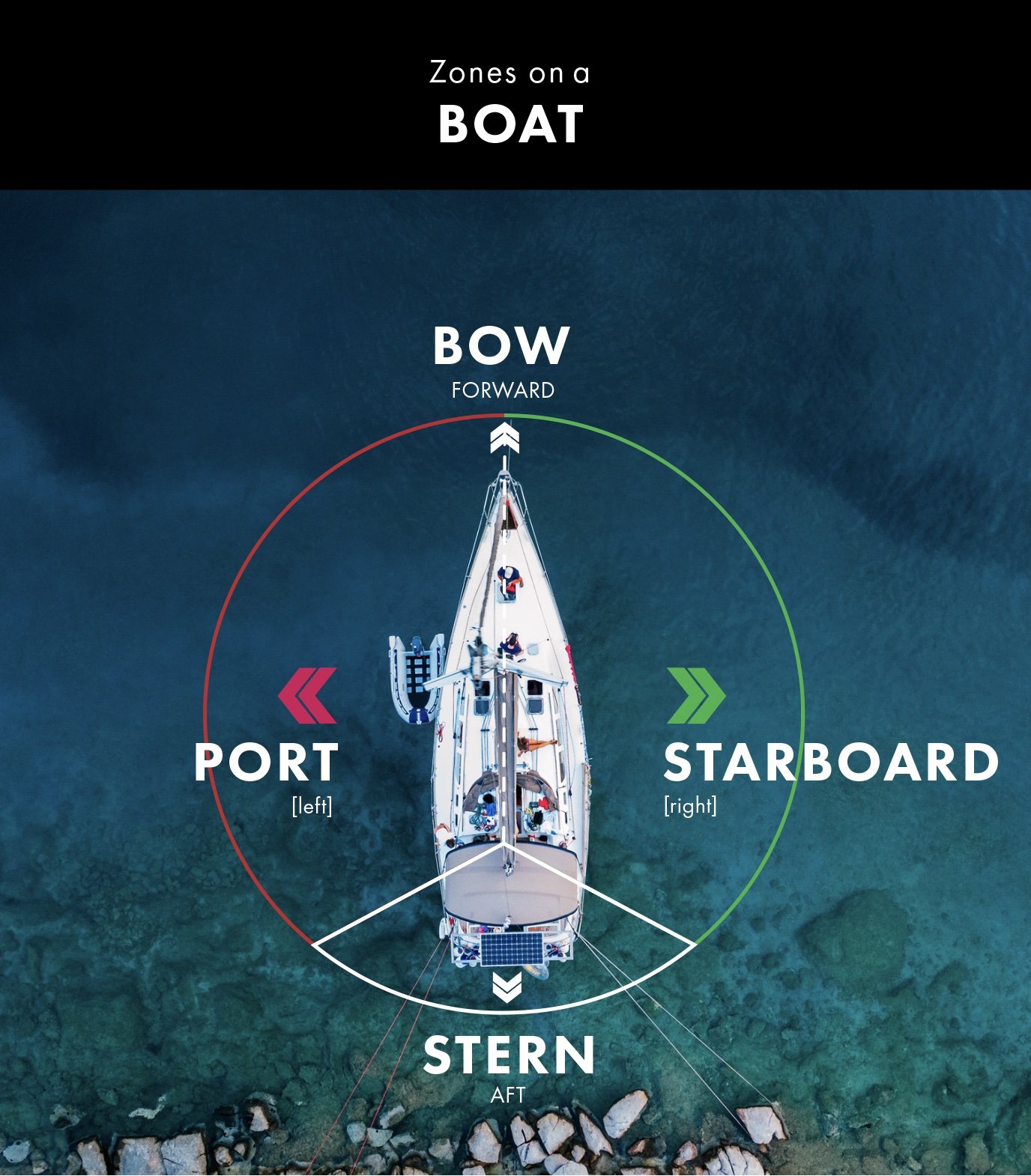
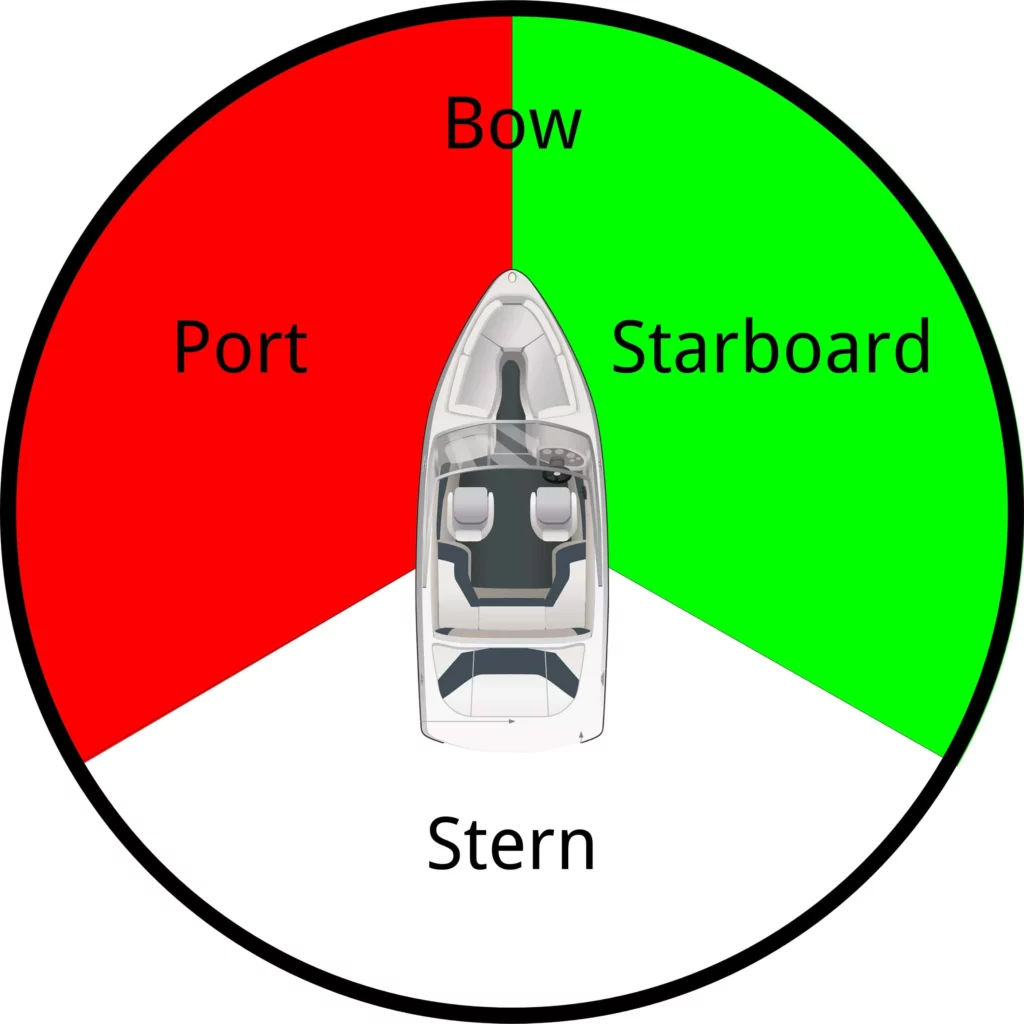
In the complex realm of flight technology, precision and a deep understanding of orientation are paramount. Just as a mariner must differentiate between the port and starboard of a vessel to navigate safely and effectively, those operating and developing advanced flight systems must grasp the multifaceted nature of “sides” within their technological frameworks. While the term “right side” evokes a simple physical orientation, in flight technology, it extends far beyond the visible, encompassing digital, navigational, and operational dimensions. This article delves into these critical “sides” of flight technology, exploring how they inform navigation, stabilization, sensor interpretation, and obstacle avoidance.
The Digital and Physical Manifestations of Orientation
The concept of a “side” in flight technology is not monolithic. It manifests both in the physical construction of the aircraft and in the digital data streams that govern its behavior. Understanding these dual realities is fundamental to comprehending how a drone or an aircraft perceives its environment and executes commands.
Physical Structure and Directional Reference
At its most basic level, flight technology, particularly in the context of drones, relies on a physical structure with distinct sides. For a quadcopter, the propellers are mounted on arms extending from a central body. While not always explicitly labeled as “left” or “right” in an intuitive sense for the end-user, these physical appendages define axes of movement and orientation. Each arm, and thus the motors and propellers attached, contributes to the overall stability and maneuverability. When a pilot or an autonomous system commands a yaw, pitch, or roll, it’s the differential application of thrust across these physical sides that achieves the desired motion. This physical definition of “sides” dictates how the drone will respond to forces and commands, influencing its inherent aerodynamic characteristics.
Coordinate Systems and Digital Referencing
Beyond the physical, flight technology operates within sophisticated coordinate systems. These digital frameworks provide a consistent and unambiguous reference for orientation and position. When we speak of the “right side” in a digital context, we often refer to a specific axis within a three-dimensional Cartesian coordinate system (X, Y, Z). For example, in many aerial robotics contexts, the positive X-axis might be defined as pointing forward from the drone, the positive Y-axis to the right, and the positive Z-axis upwards. This convention is crucial for interpreting sensor data, calculating flight paths, and executing precise movements. A GPS system, for instance, tracks the drone’s position in a global coordinate system, but the drone’s internal flight controller translates this into its own body-centric coordinate system, requiring a clear understanding of its “digital sides.”
Navigation and the Importance of Precise “Sides”
Accurate navigation hinges on the unambiguous definition and interpretation of an aircraft’s orientation relative to its environment and its intended path. The concept of “sides” plays a pivotal role in how navigation systems process information and guide the aircraft.
Heading, Pitch, and Roll: The Pillars of Aircraft Orientation
Navigation systems heavily rely on understanding an aircraft’s heading, pitch, and roll. Heading refers to the horizontal direction in which the aircraft is pointing, often expressed as an angle relative to magnetic north. Pitch is the angle of the aircraft’s nose relative to the horizon (up or down), while roll is the rotation around the aircraft’s longitudinal axis. These three angles collectively define the aircraft’s attitude. When a navigation system aims to maintain a specific course or execute a turn, it continuously monitors and adjusts these parameters. A command to turn right, for instance, requires not only a change in heading but also a coordinated application of roll and potentially pitch to maintain stability and efficiency. The “right side” in this context isn’t a fixed point but a dynamic orientation that the navigation system actively manages.
Waypoint Navigation and Directional Awareness
In waypoint navigation, an aircraft is programmed to fly to a series of predefined locations. The navigation system must not only determine the aircraft’s current position but also its orientation to ensure it is facing the correct direction to approach and depart from each waypoint. If the waypoint is directly to the “right” of the aircraft’s current heading, the system will initiate a turn to align the aircraft’s forward-facing direction with the vector to the waypoint. This directional awareness is critical for efficient flight path planning and execution, preventing unnecessary maneuvers or deviations.
Stabilization Systems: Maintaining Equilibrium Across All “Sides”
The ability of flight technology to remain stable, even in turbulent conditions, is largely due to sophisticated stabilization systems. These systems constantly monitor the aircraft’s orientation and make micro-adjustments to counteract unwanted movements across all its “sides.”
Inertial Measurement Units (IMUs) and Gyroscopic Principles
At the heart of most stabilization systems are Inertial Measurement Units (IMUs). An IMU typically comprises accelerometers and gyroscopes. Gyroscopes measure angular velocity and detect rotation along different axes, effectively sensing how the aircraft is tilting or turning on its “sides.” Accelerometers measure linear acceleration, which can be used to infer gravity and thus the aircraft’s orientation relative to the Earth’s horizon. By processing data from these sensors, the stabilization system can detect any deviation from the desired attitude – whether it’s a roll to the right, a pitch up, or a yaw to the left – and command the motors to compensate.
Feedback Loops and Active Correction
Stabilization systems operate on principles of feedback control. They establish a desired state (e.g., level flight) and continuously compare it to the aircraft’s current state, as measured by the IMU. If there’s a discrepancy, such as a gust of wind pushing the drone’s right side down, the stabilization system detects this roll. It then sends signals to the motors on the opposite side (left side) to increase their thrust, or to the motors on the affected side (right side) to decrease thrust, thereby counteracting the roll and restoring the desired level orientation. This continuous cycle of sensing, comparing, and correcting ensures that the aircraft maintains a stable platform, regardless of external disturbances.
Sensors and Interpreting the Environment from Multiple Perspectives
Sensors are the “eyes and ears” of flight technology, providing crucial data about the environment. How this data is interpreted often depends on understanding the sensor’s position relative to the aircraft’s own “sides” and the direction from which it is observing.
Camera Systems and Field of View
For camera-equipped drones, the “right side” often pertains to the camera’s orientation and its field of view. A forward-facing camera captures what is directly ahead. However, for comprehensive situational awareness, drones may employ multiple cameras or a gimbal-mounted camera that can pan and tilt. When a pilot or autonomous system directs the camera to look towards the “right,” it’s engaging a specific pan movement on the gimbal. This allows for scanning the environment laterally, identifying potential obstacles or targets that might be missed by a purely forward-facing sensor. Understanding the camera’s limitations and its ability to observe to the “right” is key to effective visual navigation and data acquisition.
LiDAR, Radar, and 360-Degree Awareness
More advanced flight technologies utilize sensors like LiDAR (Light Detection and Ranging) and radar for obstacle avoidance and mapping. These sensors often provide a wider, sometimes even 360-degree, view of the surroundings. While the physical placement of these sensors on the aircraft might define a primary direction of operation, the data they generate is often processed to build a complete environmental model. A LiDAR sensor mounted on the right side of a drone, for instance, will primarily scan that quadrant. However, when integrated with data from sensors on other sides, it contributes to a comprehensive understanding of all surrounding objects and terrain, crucial for safe autonomous flight.
Obstacle Avoidance: Proactive Identification and Reaction to “Sides”
Effective obstacle avoidance is a cornerstone of modern flight technology, especially for autonomous systems. It requires not only sensing potential hazards but also understanding their relative position and trajectory concerning the aircraft’s own “sides.”
Sensor Fusion for Comprehensive Hazard Detection
Obstacle avoidance systems often rely on data fusion from multiple sensors. This includes cameras, ultrasonic sensors, radar, and LiDAR. Each sensor might have a different range, resolution, and directional bias. For example, ultrasonic sensors might be placed on the front and sides to detect proximity, while a downward-facing sensor detects ground proximity. The flight controller then processes these inputs to create a unified picture of the surrounding environment. If an object is detected to the drone’s “right,” the system will analyze its distance, speed, and trajectory.
Reactive Maneuvers and Evasive Strategies
Based on the analysis of detected obstacles, the avoidance system initiates reactive maneuvers. If an object is directly ahead and unavoidable, the system might command the drone to brake or hover. However, if there is space to maneuver, the system might command a lateral evasion. This could involve a gentle turn to the left to give the object on the right a wider berth, or a controlled ascent or descent. The decision-making process here is complex, taking into account the aircraft’s current speed, altitude, and available space. Understanding which “side” the obstacle is on and the best evasive strategy relative to the aircraft’s own movement is paramount to preventing collisions.
In conclusion, while the literal “right side of a ship” is a simple navigational term, the concept of “sides” within flight technology is a rich and complex tapestry. It encompasses the physical architecture of the aircraft, the digital coordinate systems that define its orientation, the sophisticated algorithms of navigation and stabilization, and the multifaceted data streams from its sensors. A thorough understanding of these various “sides” – from the physical and digital to the navigational and operational – is essential for pushing the boundaries of what is possible in aerial robotics and aviation, ensuring safer, more efficient, and more capable flight.