Trigonometry, often abbreviated as trig, might initially seem like an abstract mathematical concept confined to textbooks and classrooms. However, for those operating at the forefront of flight technology, particularly within the realms of navigation, stabilization, and sensor integration, trigonometric functions are not just theoretical tools but the bedrock upon which reliable and sophisticated systems are built. The ability to accurately determine angles, distances, and relationships between points in three-dimensional space is fundamental to achieving precise control, safe operation, and effective data acquisition for a vast array of aerial applications.
The Foundational Role of Trigonometry in Flight Dynamics
At its core, flight technology relies on understanding and manipulating an aircraft’s position and orientation within its environment. Trigonometry provides the mathematical language to quantify these elements, enabling systems to calculate vectors, resolve forces, and predict movement with remarkable accuracy. Without these fundamental relationships, the complex algorithms that govern modern flight would be impossible to devise or implement.
Understanding Position and Orientation
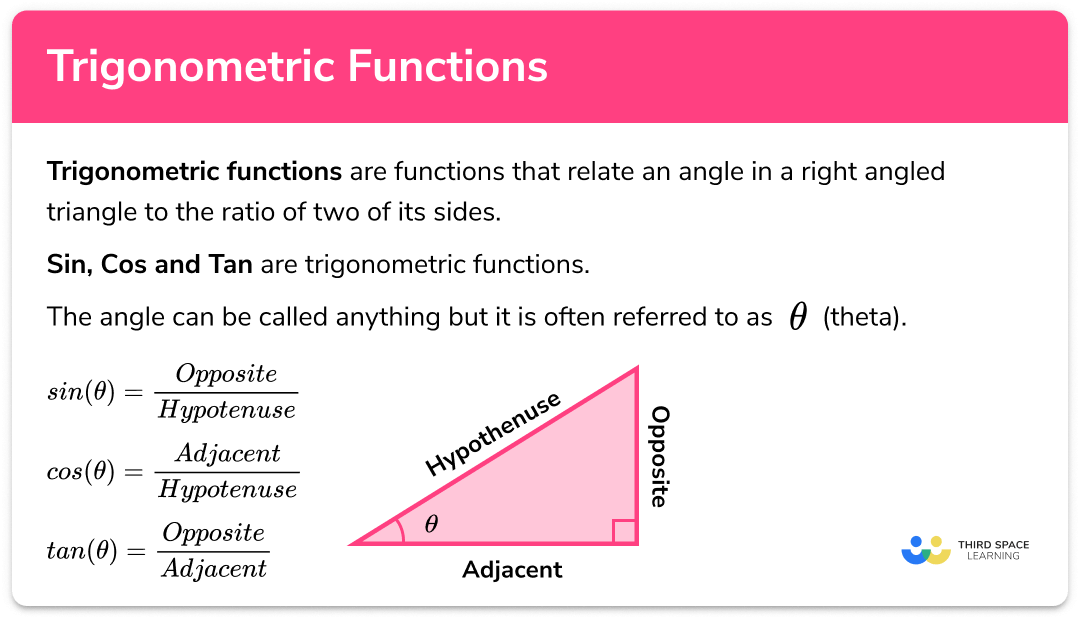
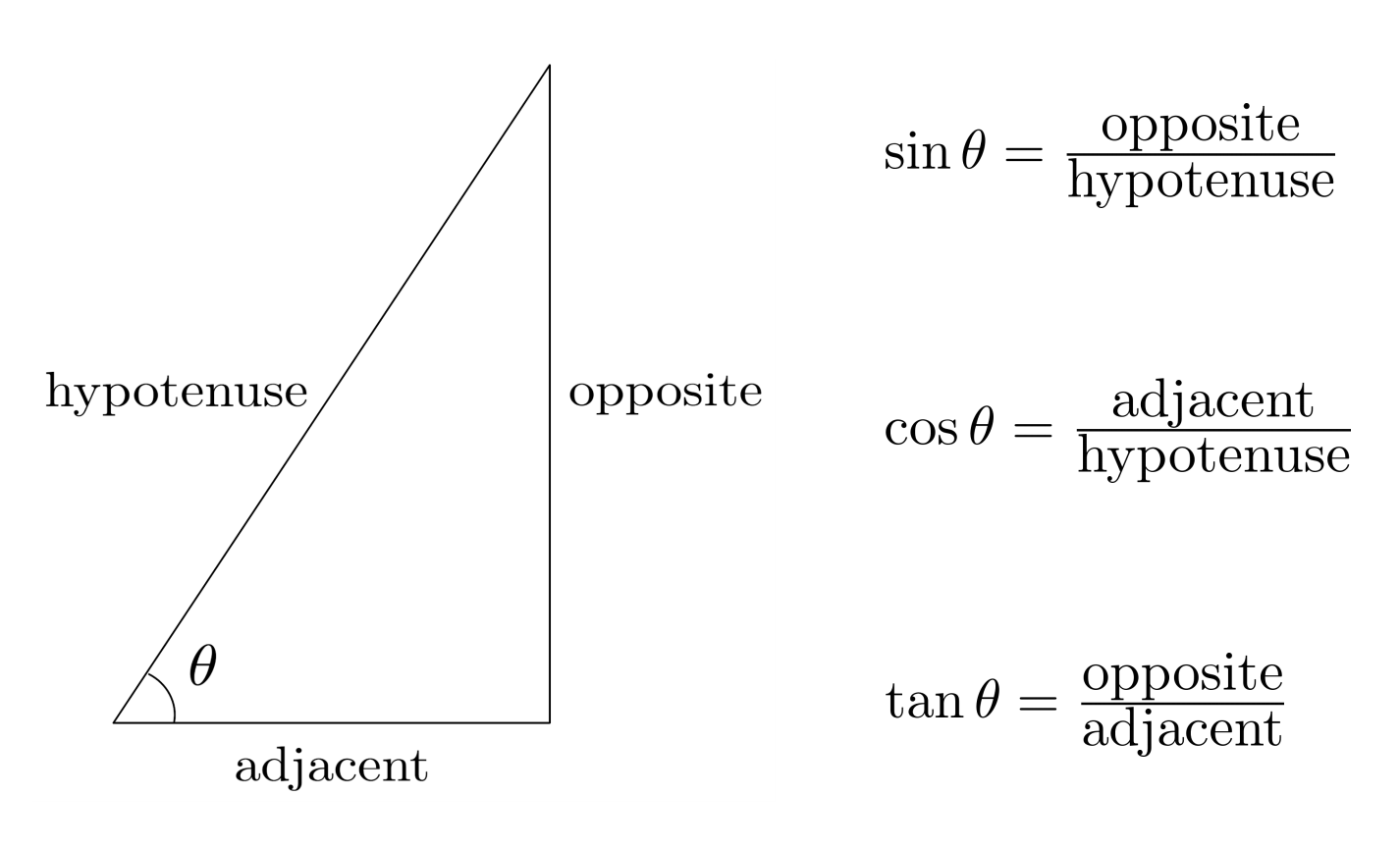
The position of an aircraft in three-dimensional space can be represented using Cartesian coordinates (x, y, z). However, understanding its orientation – how it is currently pitched, rolled, and yawed – requires more than just linear measurements. This is where trigonometric functions like sine, cosine, and tangent become indispensable.
Angles and Vectors
When an aircraft deviates from a desired heading or altitude, its movement can be described as a vector. Trigonometry allows us to break down these vectors into their component parts along the x, y, and z axes. For instance, if an aircraft is banking to the left, its forward velocity vector can be decomposed into components that contribute to both its forward motion and its sideways drift. This decomposition is crucial for calculating the necessary control inputs to counteract unwanted movements or to achieve a specific maneuver.
Consider a drone attempting to fly directly north. If it experiences a crosswind blowing from the west, it will need to angle its nose slightly into the wind (a process known as crabbing) to maintain its northerly track. Trigonometry allows the flight controller to calculate the precise angle of this crab by considering the desired ground speed, the true airspeed, and the wind vector. The sine and cosine of the crab angle will determine the proportions of the drone’s thrust that contribute to forward motion and counteract the sideways wind.
Resolving Forces
Forces acting on an aircraft, such as lift, drag, thrust, and gravity, are often not perfectly aligned with the aircraft’s primary axes. Trigonometry is essential for resolving these forces into components that can be understood and managed by the control system. For example, gravity acts downwards, but if an aircraft is climbing at an angle, only a portion of the gravitational force will oppose its upward motion. Similarly, the thrust generated by engines might not be perfectly horizontal during ascent or descent.
Navigational Calculations and Waypoint Following
Precise navigation is a hallmark of modern flight technology, and trigonometry underpins many of its core functions, from basic heading calculations to complex waypoint sequencing.
Bearing and Distance Determination
When a flight system needs to travel from Point A to Point B, trigonometry is used to calculate the bearing (the direction or angle relative to North) and the distance between these two points. This is often done using spherical trigonometry when dealing with large distances on the Earth’s surface, where the curvature of the planet cannot be ignored. For shorter distances, planar trigonometry suffices.
Imagine a drone programmed to fly to a specific GPS coordinate. The flight controller receives the current GPS coordinates of the drone and the target coordinates. Using the difference in latitude and longitude, and potentially applying the Haversine formula (which itself relies heavily on trigonometric functions), the system can accurately determine the direction and distance to the target. This information is then fed into the navigation and control systems to guide the drone along the most efficient path.
Maintaining a Desired Track
Even with accurate initial navigation calculations, external factors like wind can cause an aircraft to drift off its intended course. Trigonometry is vital for constantly recalculating the necessary adjustments to maintain the desired track. By measuring the aircraft’s actual movement relative to the ground and comparing it to the intended movement, the flight control system can determine the magnitude and direction of any deviation. Trigonometric functions then help translate this deviation into precise adjustments to the aircraft’s heading and airspeed, ensuring it stays on course.
Trigonometry in Sensor Fusion and Stabilization Systems
Beyond basic navigation, the sophisticated operations of modern flight technology heavily rely on trigonometry for interpreting data from various sensors and maintaining stability. Stabilization systems, in particular, are complex control loops that would be inoperable without a deep understanding of trigonometric principles.
Interpreting Inertial Measurement Unit (IMU) Data
Inertial Measurement Units (IMUs) are critical components that measure an aircraft’s angular velocity and linear acceleration. These sensors provide raw data that needs to be processed to understand the aircraft’s orientation and movement. Trigonometry plays a key role in transforming this raw sensor data into usable information for the flight controller.
Accelerometer and Gyroscope Data Processing
An IMU typically contains accelerometers and gyroscopes. Accelerometers measure linear acceleration along three axes, while gyroscopes measure angular rates of rotation around three axes. When an aircraft pitches, rolls, or yaws, these sensors detect the resulting accelerations and rotational velocities. Trigonometric functions are used to:
- Resolve accelerations: If an aircraft is accelerating forward while also experiencing a vertical acceleration due to a sudden climb, trigonometry helps separate these components.
- Integrate angular rates: The angular rates from the gyroscopes are integrated over time to estimate changes in orientation (pitch, roll, and yaw). This integration process involves calculating the effect of each small angular rotation, and trigonometric functions are used to determine how these rotations affect the aircraft’s overall orientation in 3D space. For example, a small roll may slightly alter the perceived vertical direction from an accelerometer, and trigonometry is used to compensate for this.
Attitude Determination
By combining data from accelerometers (which are sensitive to gravity and can thus provide a reference for the vertical) and gyroscopes (which provide precise measurements of rotation), and applying trigonometric transformations, the flight control system can accurately determine the aircraft’s attitude – its pitch, roll, and yaw angles relative to the Earth. This information is fundamental for both stabilization and for performing controlled maneuvers.
Gimbal Stabilization and Camera Pointing
For applications like aerial photography and videography, maintaining a stable camera platform is paramount. Gimbals are electromechanical devices that use motors and sensors to counteract the movement of the aircraft, keeping the camera level or pointed in a specific direction. Trigonometry is the invisible force behind their precision.
Calculating Compensating Movements
A gimbal often operates with three axes of rotation (pan, tilt, and roll) to isolate the camera from the drone’s movements. When the drone pitches up, the gimbal’s tilt motor must move downwards by an equivalent angle to keep the camera level. Similarly, if the drone rolls left, the gimbal’s roll motor must move right. Trigonometric functions are used to:
- Determine required angular corrections: Based on the drone’s measured attitude (derived from its IMU, as discussed above) and the desired camera orientation, trigonometry calculates the precise angle and direction each gimbal motor needs to move.
- Account for gimbal limitations: In some scenarios, the gimbal might not have enough range of motion to perfectly compensate for extreme drone movements. Trigonometry helps the system understand these limitations and potentially adjust camera framing or alert the operator.
Maintaining Target Lock
In advanced applications, gimbals are used to track moving targets. This requires continuous real-time calculations based on the target’s movement, the drone’s movement, and the desired camera angle. Trigonometry is used to predict the target’s future position and to continuously adjust the gimbal’s pan and tilt angles to keep the target centered in the frame. This involves calculating vectors to the target and continuously updating the angles needed to maintain that vector.
Advanced Applications: Beyond Basic Control
The principles of trigonometry extend into more complex areas of flight technology, impacting everything from sophisticated mapping and surveying to autonomous decision-making.
3D Mapping and Photogrammetry
The creation of detailed 3D models of terrain, structures, and environments from aerial imagery (photogrammetry) is a powerful application of flight technology. Trigonometry is fundamental to this process.
Georeferencing and Point Cloud Generation
When a drone captures images for photogrammetry, its precise position and attitude at the moment each photo was taken are critical. This data, often captured by an integrated GPS and IMU, is combined with the image data. Trigonometry is used to:
- Calculate the spatial orientation of each pixel: For every point in an image, trigonometry helps determine its real-world 3D coordinates. By knowing the camera’s internal parameters (focal length, lens distortion) and its external position and orientation (obtained from GPS and IMU data processed using trig), the system can triangulate the position of points in the real world.
- Create dense point clouds: As multiple images of the same area are captured from different viewpoints, overlapping points are identified. Trigonometry allows for the precise alignment and integration of these points from each image, building a dense 3D “point cloud” that represents the surveyed area.
Autonomous Flight and Obstacle Avoidance
The pursuit of fully autonomous flight necessitates advanced perception and decision-making capabilities, where trigonometry plays a vital role in processing sensor data and planning safe trajectories.
Understanding Sensor Data for Environmental Awareness
Obstacle avoidance systems, for instance, rely on sensors like LiDAR, radar, and cameras to detect and characterize the environment. Trigonometry is used to transform the raw data from these sensors into meaningful spatial information.
- LiDAR and Radar: These sensors emit signals and measure the time it takes for them to return after reflecting off an object. Knowing the speed of the signal (light or radio waves), trigonometry is used to calculate the distance to the object. Furthermore, by knowing the direction in which the sensor was pointed when the signal returned, trigonometry can determine the object’s 3D position relative to the aircraft.
- Stereo Vision: Using two cameras to mimic human binocular vision, trigonometry is used to calculate depth by comparing the position of the same object in both images. The difference in perspective (parallax) is directly related to the object’s distance, and trigonometric principles are used to compute this.

Path Planning and Collision Detection
Once obstacles are identified and their positions are understood, trigonometry is essential for planning a safe flight path.
- Vector Calculations: The aircraft’s intended trajectory is represented as a vector. Obstacles are also represented as spatial objects with defined boundaries. Trigonometry is used to calculate the distance between the intended path vector and the obstacle boundaries, allowing the system to detect potential collisions.
- Generating Avoidance Maneuvers: If a collision is imminent, trigonometry helps calculate the necessary changes in the aircraft’s velocity and direction to safely navigate around the obstacle. This involves determining the most efficient and least disruptive avoidance maneuver that maintains the overall mission objectives.
In conclusion, trigonometric functions are far more than an academic exercise; they are the fundamental mathematical framework that empowers the sophisticated capabilities of modern flight technology. From ensuring a drone flies precisely to its destination to enabling it to safely navigate complex environments and capture detailed aerial imagery, trigonometry provides the essential tools for understanding, controlling, and interacting with the three-dimensional world. Its principles are deeply embedded within navigation systems, stabilization platforms, sensor interpretation, and autonomous decision-making processes, making it an indispensable element in the ongoing advancement of aerial technology.