Foundations of Drone Autonomy: Logic Gates in Software
The advent of sophisticated drone technology, particularly in areas of autonomous flight, AI-powered features, and advanced remote sensing, relies heavily on robust software engineering. At the heart of this software lies fundamental logical operations that enable intelligent decision-making. Among these, the OR operator in Java serves as a critical building block, allowing drone systems to evaluate multiple conditions simultaneously and respond appropriately. It’s not merely a syntax element; it’s a conceptual cornerstone for building reactive, adaptive, and resilient unmanned aerial systems (UAS).
The Logical OR in Principle
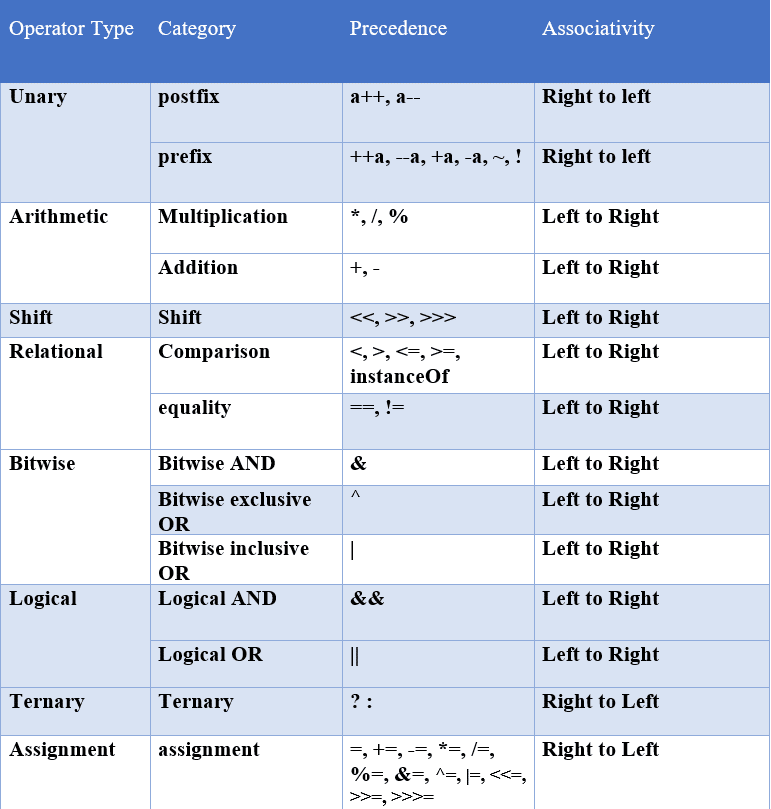
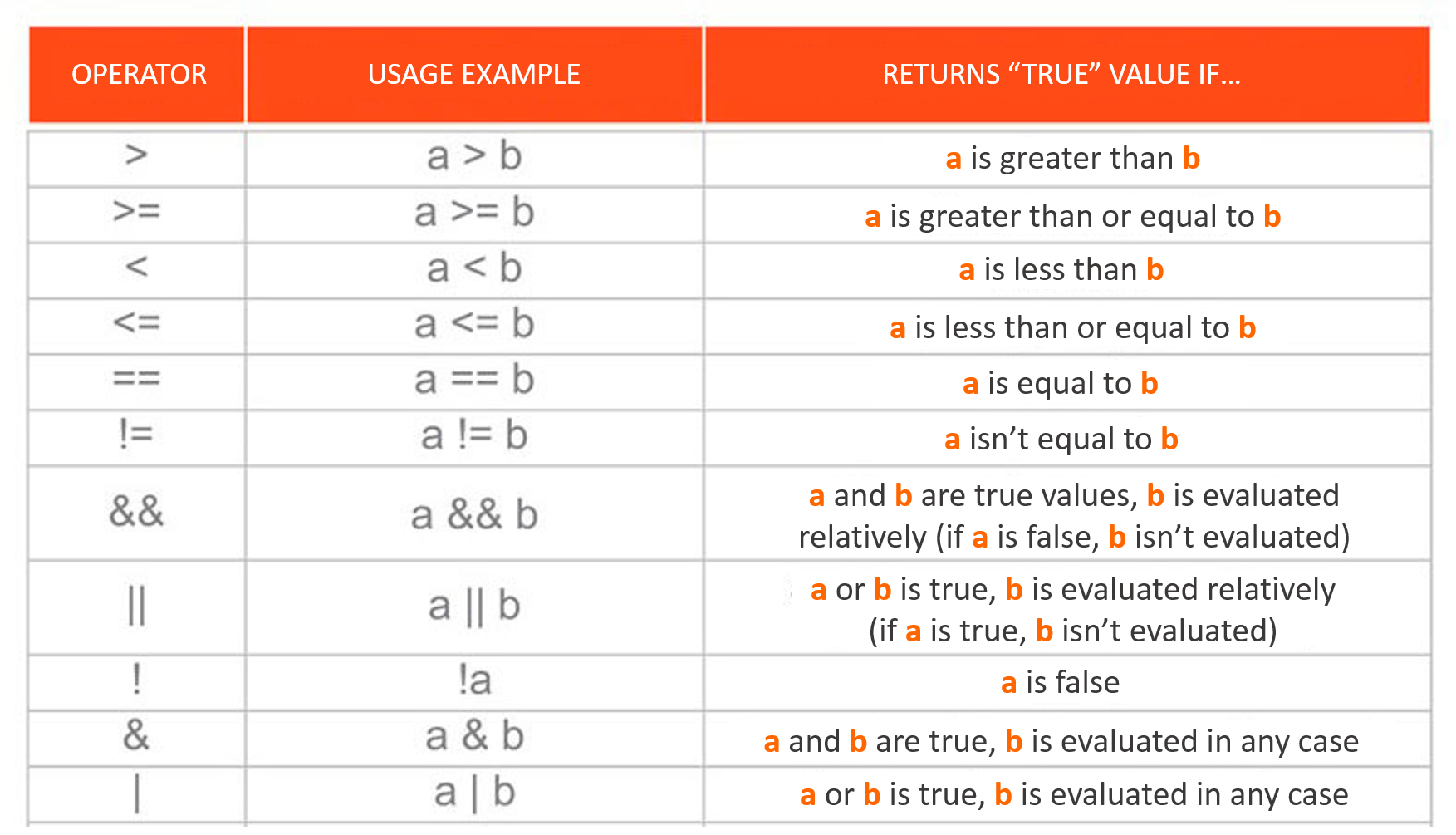
In the realm of computer science, a logical OR operation evaluates two or more boolean expressions. If any of the expressions evaluate to true, the entire OR statement returns true. It only returns false if all constituent expressions are false. In Java, this is typically represented by || (the conditional OR operator). For instance, if a drone system needs to decide whether to take a specific action, it might evaluate conditionA || conditionB. If conditionA is true (regardless of conditionB), or if conditionB is true (regardless of conditionA), the outcome is true. This simple principle forms the basis of complex decision trees within autonomous drone algorithms, allowing for flexibility and redundancy in logical evaluation. It’s a fundamental mechanism for “if this happens OR that happens, then do X.”
Applying Boolean Logic to Flight Decisions
The raw data collected by a drone’s myriad sensors—GPS, accelerometers, gyroscopes, altimeters, vision systems, thermal imagers, and more—are often translated into boolean (true/false) conditions. These conditions then become inputs for logical operations that dictate flight control. For example, a drone’s flight controller might process inputs like isObstacleDetected, isBatteryLow, isWindStrong, or isTargetLocked. By combining these boolean states with the OR operator, the system can formulate complex rules. This allows for a more nuanced and adaptive response than simply reacting to a single, isolated condition. The ability to aggregate multiple potential triggers into a single actionable outcome is paramount for dependable autonomous operations, moving beyond rigid, single-point failure logic to a more resilient, multi-faceted decision-making framework.
Real-World Applications in Autonomous Flight Systems
The OR operator’s utility becomes strikingly evident in the intricate dance of autonomous flight. From obstacle avoidance to intelligent navigation and mission-critical safeties, the capability to evaluate multiple conditions concurrently is indispensable for maintaining flight stability, safety, and mission success.
Obstacle Avoidance and Path Planning
Consider a drone operating in a complex environment. Its obstacle avoidance system might employ an array of ultrasonic, lidar, and vision sensors. Each sensor independently reports the presence of an obstruction within its field of view. An effective avoidance strategy doesn’t wait for all sensors to agree; it acts if any sensor detects a threat. Here, the OR operator is crucial: (frontSensorDetectedObstacle || leftSensorDetectedObstacle || rightSensorDetectedObstacle || upwardSensorDetectedObstacle). If any part of this combined condition evaluates to true, the drone initiates an evasive maneuver, such as ascending, braking, or changing its flight vector. This multi-sensor fusion with OR logic ensures comprehensive spatial awareness, greatly reducing collision risk. Similarly, in dynamic path planning, a drone might need to alter its route if (weatherConditionsWorsen || airspaceRestrictionEncountered || energyReserveCritical). Each of these can independently trigger a re-planning sequence, leveraging the logical OR for robust adaptability.
Intelligent Navigation and Waypoint Following
Modern drones often execute complex missions involving precise waypoint navigation or dynamic target following. The intelligence behind these operations is fortified by logical constructs. For instance, when maintaining a specific altitude or trajectory, the flight control system might adjust propulsion based on (altitudeDeviationSignificant || horizontalPositionDriftExcessive). If either condition is true, corrective action is taken. For waypoint following, a drone might decide to transition to the next waypoint if (currentWaypointReached || timeLimitExceededForCurrentWaypoint). This ensures progress even if GPS drift prevents an exact ‘reach’ confirmation, or if a specific waypoint is proving impossible to reach within a reasonable timeframe. The OR operator provides the flexibility to define multiple success criteria or multiple triggers for a state change, enhancing the system’s ability to adapt to real-world inaccuracies and dynamic environments.
Mission Critical Safeties and Failsafes
Safety is paramount in drone operations, especially with increasing autonomy. Failsafe mechanisms are often a direct application of OR logic. A drone’s flight controller might trigger a return-to-home sequence or an emergency landing if (batteryLevelCritical || GPSLostForExtendedPeriod || communicationLinkLost || motorMalfunctionDetected). Any single one of these severe conditions is sufficient to warrant an immediate, predefined emergency protocol. Without the OR operator, the system would require a cascade of individual if statements, potentially leading to less efficient or more error-prone code. The OR operator streamlines the definition of these critical safety triggers, ensuring that multiple independent failure modes can all lead to the correct emergency response, thereby enhancing overall operational reliability and safety.
Enhancing AI Follow Mode and Remote Sensing Algorithms
Beyond direct flight control, the OR operator plays an equally vital role in the higher-level intelligence of drones, particularly in AI-driven features like follow modes and the complex data processing required for remote sensing.
Target Tracking and Recognition
In AI Follow Mode, a drone is programmed to autonomously track a subject, whether it’s a person, vehicle, or animal. The algorithms for target recognition and tracking often rely on combining multiple detection criteria. For instance, an object recognition algorithm might classify a target as “human” if it detects (humanShapeSignature || specificFacialFeatures || characteristicGaitPattern). The drone needs to maintain lock on its target even if one specific visual cue is temporarily obscured. An OR condition allows the system to continue tracking based on any available identifying characteristic. Furthermore, to initiate or maintain a follow sequence, the drone might assess (targetWithinTrackingRange || targetMovingWithinExpectedParameters). If the target is simply present or moving predictably, the follow mode can persist, providing a more robust and less interruptive user experience. The ability to combine diverse recognition features with OR logic makes these AI systems remarkably adaptable to real-world variability.
Data Fusion in Remote Sensing
Remote sensing involves collecting and analyzing data from a distance, typically using advanced sensors. Drones equipped for remote sensing might carry multispectral cameras, thermal imagers, lidar scanners, and other instruments. The data from these diverse sources must often be fused and analyzed to identify anomalies or specific features. For instance, in agricultural monitoring, a drone might detect crop stress if (NDVI_Index_BelowThreshold || ThermalSignature_AboveThresholdForStress || PlantHeight_BelowExpectedRange). Any one of these indicators could signal a problem. Similarly, in environmental monitoring, identifying pollution might involve (spectralAnomaliesDetected || elevatedThermalSignatures || gaseousPlumeIdentifiedByChemicalSensor). The OR operator allows for the aggregation of multiple independent detection methods, increasing the likelihood of accurately identifying phenomena that might only manifest subtly across different spectral or thermal bands. This multi-criteria approach, enabled by logical OR, significantly enhances the robustness and accuracy of remote sensing analyses, making the drone an even more powerful tool for data acquisition and interpretation.
The Role of Java in Drone Software Ecosystems
Java’s extensive ecosystem, robust features, and platform independence make it a compelling choice for developing complex drone software, especially where reliability and scalability are paramount. The logical OR operator, while a universal programming concept, finds its powerful expression within Java’s structured environment, contributing to sophisticated control systems.
Cross-Platform Compatibility and Robustness
Java’s “write once, run anywhere” philosophy is highly beneficial for drone development. Software written in Java can often run on various embedded systems, ground control stations, and cloud platforms without significant modification, facilitating a cohesive software ecosystem. Moreover, Java’s strong typing, garbage collection, and exception handling mechanisms contribute to building robust and fault-tolerant systems, which are crucial for safety-critical applications like drone flight control and autonomous decision-making. The ability to define and manage complex logical conditions using operators like OR within such a resilient framework allows developers to create highly dependable drone operations that can gracefully handle various operational challenges and contingencies.
From Concept to Code: Implementing Logical Decisions
Ultimately, the power of the OR operator in Java for drone technology lies in its ability to translate intricate logical requirements into executable code. Whether it’s defining the conditions for a drone to avoid a collision, identifying a target, or triggering a failsafe, the OR operator provides a clear, concise, and efficient way to combine multiple truth statements into a single, actionable decision point. It empowers engineers to build sophisticated AI algorithms, intelligent navigation systems, and comprehensive safety protocols that react dynamically to the environment and mission parameters. As drone technology continues to evolve towards greater autonomy and integration into various industries, fundamental logical constructs like the OR operator will remain indispensable tools for crafting the intelligent and resilient software that powers the future of flight.