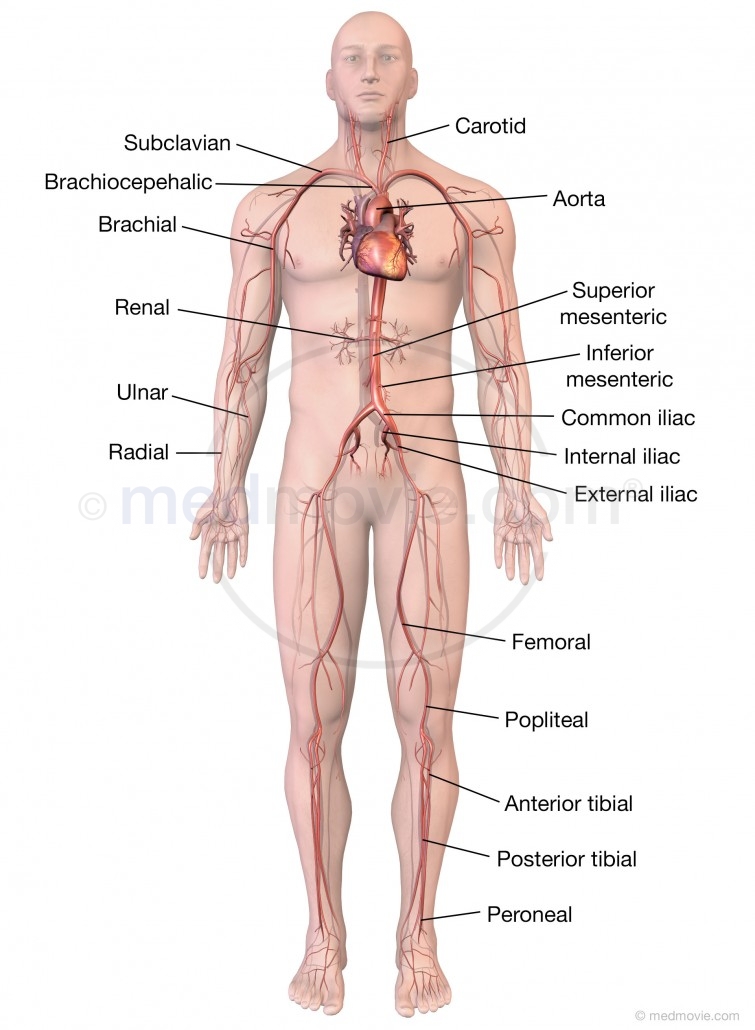
In the biological world, the aorta is the main artery of the body, responsible for carrying oxygenated blood from the heart to every other limb and organ. Without this central conduit, the system fails instantaneously. In the world of unmanned aerial vehicles (UAVs), we find a striking parallel. If we ask, “what is the main artery in the body” of a drone, the answer is not a physical vessel, but a sophisticated nexus of hardware and software: the Flight Controller (FC) and its associated data transmission protocols.
The flight controller acts as the central nervous system and the primary circulatory path for information. It is the component that takes raw data from sensors, processes it at lightning speeds, and distributes commands to the electronic speed controllers (ESCs). In this comprehensive exploration of flight technology, we will examine how the flight controller and its supporting navigation systems function as the lifeblood of modern drone technology.
The Flight Controller: The Central Aorta of Autonomous Flight
The Flight Controller is arguably the most critical piece of flight technology in any UAV. Much like the main artery of a human body, it is the primary channel through which all vital signals flow. Without a robust FC, a drone is merely a collection of plastic, carbon fiber, and motors.
Processing Power and the MCU
At the heart of the flight controller is the Microcontroller Unit (MCU). This is the “brain” that manages the flow of data. In the early days of drone technology, 8-bit processors were the standard, but as the demand for stabilization and autonomous features grew, the industry shifted toward 32-bit architecture. Today, processors like the STM32 F4, F7, and the high-performance H7 series act as the high-capacity “vessels” capable of handling thousands of calculations per second. This processing power ensures that the “blood flow” of data remains uninterrupted, even during complex maneuvers or high-speed racing.
Sensor Fusion: The Sensory Input System
For a drone to stay level, it needs to know its orientation in 3D space. This is achieved through sensor fusion—the process of combining data from multiple sensors to create a single, accurate picture of the aircraft’s state. The Inertial Measurement Unit (IMU), which typically consists of a gyroscope and an accelerometer, provides the raw data. The flight controller’s firmware (such as Betaflight, ArduPilot, or PX4) then applies complex mathematical filters, like the Kalman filter, to “clean” this data. This filtering process is essential; it prevents electronic “noise” from clogging the main artery of the flight system, ensuring that only clean, actionable data reaches the motors.
PID Loops: The Pulse of Stabilization
The “pulse” of a drone’s flight technology is the PID loop (Proportional, Integral, Derivative). This is the continuous calculation the flight controller performs to correct errors in the drone’s position. If a gust of wind tips the drone, the PID loop calculates the exact amount of power needed to rectify the tilt. A well-tuned PID loop allows for smooth, arterial-like flow of power, while a poorly tuned one results in “oscillations,” which can be compared to an irregular heartbeat in a biological system.
Signal Transmission Protocols: The Circulatory System of Data
If the Flight Controller is the aorta, then the communication protocols used to transmit data between the receiver, the FC, and the ESCs are the veins and capillaries. The speed and reliability of these protocols determine the responsiveness of the aircraft.
Digital Protocols: From PWM to DShot
In the infancy of drone flight technology, Pulse Width Modulation (PWM) was the standard. However, PWM was slow and susceptible to interference. The evolution toward digital protocols revolutionized how drones fly. Today, we utilize protocols like DShot (Digital Shot), which communicates directly with the ESCs in a digital language. DShot1200, for example, allows for incredible data throughput, ensuring that the “main artery” of the drone is never congested. This high-speed communication allows the motors to respond to the flight controller’s commands in microseconds, providing a level of stability that was once thought impossible.
SBUS and IBUS: High-Speed Receiver Communication
The communication between the pilot’s radio receiver and the flight controller is another vital branch of the drone’s “circulatory” system. Protocols like SBUS (Serial Bus) allow for multiple channels of information to be sent over a single wire. This streamlines the internal wiring of the drone, much like how a main artery minimizes the need for hundreds of smaller, redundant vessels. By using a serial bus, the flight technology can handle complex inputs—such as flight mode changes, gimbal controls, and emergency kill switches—simultaneously without latency.

ESC Feedback and Telemetry
Modern flight technology does not just send signals one way; it is a bidirectional system. Through telemetry, the ESCs can “talk back” to the flight controller. They provide real-time data on motor RPM, temperature, and current draw. This feedback loop is essential for the health of the aircraft. If a motor is over-stretching its limits, the flight controller can adjust the power distribution to prevent a catastrophic failure. This is the drone’s equivalent of a biological feedback loop that regulates blood pressure during physical exertion.
Navigation and Spatial Awareness: The Brain and the Blood Flow
A drone that can only stabilize itself but doesn’t know where it is in the world is like a body without a sense of direction. For high-level flight technology, the integration of Global Navigation Satellite Systems (GNSS) is the next critical component.
GPS Integration and Coordinate Systems
GPS (Global Positioning System) and GLONASS are the external signals that the drone uses to “map” its environment. When a flight controller is equipped with a GPS module, it gains the ability to perform “Position Hold” and “Return to Home” (RTH) functions. In this context, the GPS data becomes a secondary main artery, pumping vital coordinate data into the flight controller. This allows the drone to fight against external forces like wind drift autonomously, maintaining a “digital tether” to its take-off point.
Barometers and Magnetometers: Maintaining Altitude and Heading
While GPS provides horizontal coordinates, the barometer (pressure sensor) and magnetometer (compass) provide vertical and directional stability. The barometer measures tiny changes in air pressure to determine altitude, allowing the drone to maintain a consistent height without pilot input. The magnetometer ensures the drone knows which way is North, preventing “toilet bowling”—a phenomenon where a drone circles uncontrollably because its internal compass and GPS data are conflicting. These sensors act as the “inner ear” of the drone, ensuring balance and orientation flow smoothly through the system.
Obstacle Avoidance and Vision Systems
The most advanced flight technology today incorporates “Vision Systems” or “Optical Flow” sensors. Using stereo cameras or ultrasonic sensors, the drone can “see” obstacles in its path. This data is processed in real-time by the flight controller to automatically reroute the flight path. This is the ultimate evolution of the drone’s “arterial” system—a proactive network that not only keeps the drone alive but also protects it from external trauma by navigating around hazards autonomously.
Innovation in Flight Tech: The Future of Autonomous Systems
As we look toward the future, the “main artery” of drone flight technology is becoming more intelligent. We are moving away from simple stabilization and toward true Artificial Intelligence (AI).
Edge Computing and AI Follow Modes
Newer flight controllers are being equipped with dedicated AI processors capable of “Edge Computing.” This means the drone can identify objects (like a person or a vehicle) and track them without needing a constant signal from a ground station. The data flow here is massive; high-definition visual data must be converted into flight commands instantly. This requires a “widening” of the main artery—increased bandwidth and faster processors that can handle the sheer volume of “vision-to-motion” calculations.
Redundancy and Fail-safe Systems
In commercial and industrial drones, a single “artery” is a point of failure. Therefore, modern flight technology is moving toward “Triple Redundancy.” These systems feature three IMUs and two separate flight controllers working in parallel. If one system detects an error or “clog” in the data flow, the backup system takes over instantly. This redundancy is what makes modern drones safe for use in urban environments and for critical tasks like medical supply delivery.
The Modular Evolution
Finally, the future of flight technology lies in modularity. Just as medical science seeks to replace damaged vessels, drone manufacturers are designing flight controllers that are “plug-and-play.” This allows for the rapid upgrading of the drone’s central nervous system as new technology emerges. Whether it’s a new GPS constellation or a faster communication protocol, the ability to upgrade the “main artery” ensures that the aircraft remains at the cutting edge of performance throughout its lifespan.
In conclusion, when we ask “what is the main artery in the body” of a drone, we are looking at the intricate dance of the Flight Controller and the high-speed data protocols that sustain it. From the micro-calculations of the PID loop to the global coordinates provided by satellites, every piece of flight technology must work in harmony to keep the aircraft stable, responsive, and safe. As these systems continue to evolve, the “pulse” of drone technology only grows stronger, pushing the boundaries of what is possible in our skies.