In the rapidly evolving landscape of drone technology and innovation, the seemingly simple mathematical concept of the Least Common Multiple (LCM) plays a surprisingly fundamental role. While discussions often gravitate towards advanced topics like AI-driven autonomous flight, sophisticated sensor fusion, or groundbreaking materials science, the underlying principles that ensure seamless operation and optimal performance often stem from basic mathematical logic. The question “what is the LCM of 8 and 12” might sound like a relic from a school textbook, but its answer – 24 – holds significant implications for synchronizing complex drone operations, optimizing AI algorithms, and enhancing the overall efficiency of advanced aerial systems.
This article delves into the core concept of LCM, demonstrating how this foundational mathematical tool underpins various critical aspects of drone technology and innovation. From orchestrating multi-drone swarms to synchronizing diverse sensor inputs for real-time decision-making, understanding and applying the LCM is crucial for pushing the boundaries of what drones can achieve in a connected, intelligent future. We will explore how this concept, often overlooked in its simplicity, becomes an indispensable component in developing robust, efficient, and truly innovative unmanned aerial systems.
Understanding the Least Common Multiple (LCM)
Before we explore its profound applications in drone technology, let’s briefly revisit the definition and calculation of the Least Common Multiple (LCM). At its heart, the LCM of two or more integers is the smallest positive integer that is a multiple of all the given integers. It represents the point at which different cycles or frequencies align perfectly.
The Basics of Multiples and Common Multiples
To find the LCM, we first list the multiples of each number. A multiple of a number is simply the result of multiplying that number by an integer.
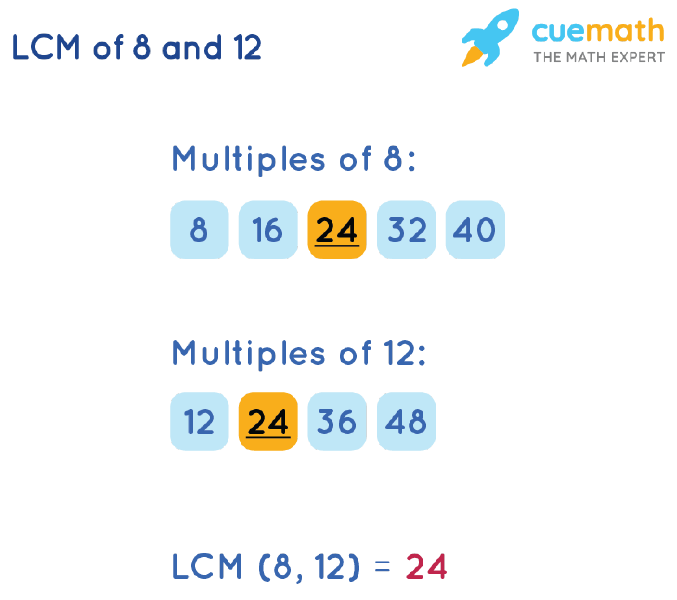
For the number 8, its multiples are: 8, 16, 24, 32, 40, 48, …
For the number 12, its multiples are: 12, 24, 36, 48, 60, …
From these lists, we can identify common multiples – numbers that appear in both lists. In this case, the common multiples of 8 and 12 include 24, 48, 72, and so on.
Unveiling the LCM of 8 and 12
Among the common multiples, the Least Common Multiple (LCM) is the smallest one. By inspecting the lists above, it is clear that the smallest number common to both sets of multiples is 24.
Therefore, the LCM of 8 and 12 is 24.
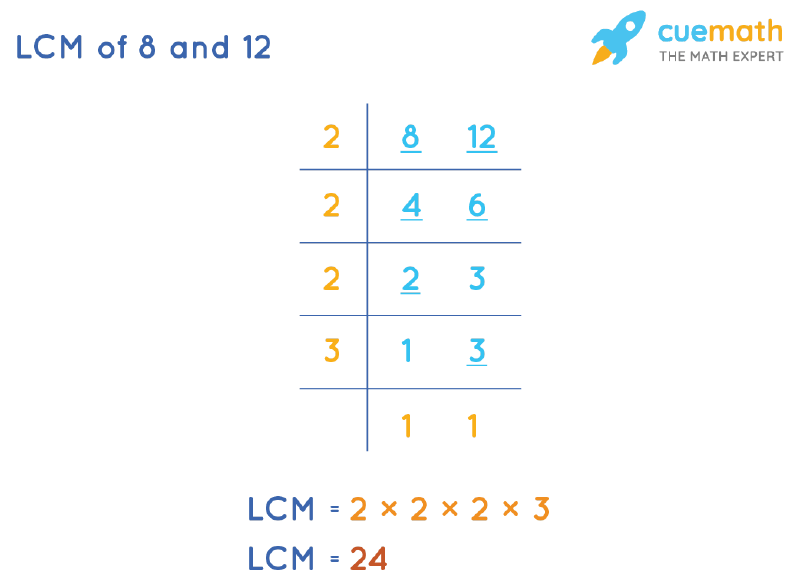
While listing multiples is intuitive for small numbers, for larger or more numbers, methods like prime factorization are more efficient. For 8, its prime factorization is $2^3$. For 12, it is $2^2 times 3^1$. To find the LCM using prime factorization, you take the highest power of all prime factors present in any of the numbers. Here, the highest power of 2 is $2^3$ (from 8), and the highest power of 3 is $3^1$ (from 12). Multiplying these gives $2^3 times 3^1 = 8 times 3 = 24$. This foundational mathematical understanding, though simple, lays the groundwork for tackling complex synchronization challenges in advanced technological systems, especially within the dynamic domain of drone operations.
Synchronizing Complex Drone Operations with LCM
The ability to find the Least Common Multiple is a quiet workhorse behind many synchronization and scheduling challenges in modern drone technology. In scenarios where multiple independent processes, components, or entire drone units operate on different cycles, the LCM becomes indispensable for determining the optimal moment for alignment, data fusion, or coordinated action. This is particularly vital in the context of “Tech & Innovation,” where the emphasis is on creating intelligent, autonomous, and highly integrated systems.
Multi-Drone Swarm Coordination
One of the most compelling applications of LCM in drone innovation lies in the realm of multi-drone swarm coordination. Imagine a fleet of drones tasked with a complex mission, such as mapping a vast agricultural area, conducting search and rescue operations, or performing a synchronized aerial display. Each drone might have slightly different operational parameters, such as varying battery life, different sensor refresh rates, or assigned flight paths that take varying amounts of time to complete.
Consider a scenario where Drone A is assigned a segment of a mission that takes exactly 8 minutes to complete before returning to a staging point or changing its operational mode. Drone B, on the other hand, has a different task or route that requires 12 minutes to complete. For the swarm to perform a synchronized action – perhaps recharging, sharing data, or commencing the next phase of the mission together – they need to meet at a common interval. The LCM of 8 and 12, which is 24, tells us that after 24 minutes, both Drone A (completing 3 cycles) and Drone B (completing 2 cycles) will simultaneously arrive at a synchronized state or location. This understanding allows engineers to design robust coordination algorithms that ensure efficient resource utilization, minimize downtime, and prevent collisions in shared airspace. Without this mathematical foundation, coordinating complex drone maneuvers would be significantly more challenging, leading to inefficiencies and potential mission failures.
Sensor Data Fusion and Sampling Rates
Modern drones are equipped with an array of sophisticated sensors, including optical cameras, thermal cameras, LiDAR, GPS, and various environmental sensors. Each of these sensors might operate at a different sampling rate or update frequency. For instance, a high-resolution optical camera might capture images every 8 milliseconds for maximum detail, while a thermal camera, focused on broader thermal signatures, might update every 12 milliseconds.
For an autonomous drone to make informed, real-time decisions, it must fuse the data from these disparate sources. Simply taking the latest data from each sensor might lead to an asynchronous and potentially inconsistent understanding of the environment. Here, the LCM becomes critical. By identifying the LCM of the sensor update rates (e.g., 24 milliseconds for 8ms and 12ms cycles), the drone’s onboard processing unit can schedule data fusion points where all relevant sensor data is maximally fresh and aligned. This ensures that the drone’s perception system operates on a synchronized snapshot of reality, leading to more accurate obstacle avoidance, better target tracking, and more reliable navigation, particularly in dynamic and complex operational environments. The innovative integration of diverse sensor data, a cornerstone of advanced drone perception, heavily relies on such fundamental synchronization principles.
Scheduled Maintenance and Resource Management
Beyond direct flight operations, LCM also finds utility in the logistical and operational efficiency aspects of drone fleets, contributing to overall technological innovation in maintenance and resource management systems. Drones, like any advanced machinery, require periodic maintenance and resource replenishment. Different components or consumable parts might have different optimal service intervals.
Consider a professional drone operation where propeller sets typically need replacement or recalibration after 8 hours of flight time, while critical motor inspections are recommended every 12 hours of operation. To optimize the maintenance schedule and minimize the total downtime of a drone, it would be beneficial to perform both tasks simultaneously whenever possible. The LCM of 8 and 12, which is 24, indicates that every 24 hours of flight time, both the propellers and motors will require attention. By scheduling comprehensive maintenance at these LCM intervals, operators can reduce the number of separate maintenance events, streamline logistics, and keep drones operational for longer periods. This application of LCM contributes to the innovative development of predictive maintenance algorithms and resource management platforms, enhancing the economic viability and operational readiness of large drone fleets.
Optimizing Autonomous Systems and AI Algorithms
The frontier of drone technology is undeniably autonomous systems and artificial intelligence. These advanced capabilities require meticulously designed algorithms that can process vast amounts of data, make instantaneous decisions, and learn from experience. Even at this sophisticated level, basic mathematical principles, including the LCM, serve as foundational elements for optimizing performance, ensuring data integrity, and enhancing decision-making frameworks.
AI Follow Mode and Predictive Analytics
AI-driven follow modes and object tracking are pivotal for various drone applications, from filmmaking to surveillance. These systems often track multiple dynamic targets simultaneously, each potentially exhibiting different movement patterns or requiring data updates at varying frequencies. If an AI algorithm is monitoring, for instance, a subject whose telemetry data is updated every 8 data cycles and another target whose visual signature is re-evaluated every 12 data cycles, the system needs to know when both pieces of information are maximally current and aligned for a comprehensive decision.
The LCM of 8 and 12 (24) dictates that every 24 cycles, both data streams will have just been refreshed. This allows the AI to schedule specific decision points or recalibration moments where it can confidently utilize the most up-to-date information for both targets, leading to smoother tracking, more accurate predictions of future movement, and more intelligent interaction with the environment. This foundational synchronization improves the responsiveness and reliability of AI systems, making autonomous flight and object interaction significantly more robust.
Adaptive Path Planning and Obstacle Avoidance
In dynamic environments, a drone’s ability to plan paths and avoid obstacles in real-time is paramount. This involves constant interaction with various sensors (like ultrasonic, lidar, and vision systems), each providing data at different intervals. An ultrasonic sensor might provide quick, short-range updates every 8ms, while a more sophisticated vision-based obstacle detection system might process detailed images every 12ms.
For effective adaptive path planning, especially in rapidly changing scenarios, the drone’s navigation AI must integrate these different data streams without lag or inconsistency. Using the LCM, the AI can establish synchronized decision windows (e.g., every 24ms) where all relevant obstacle data is simultaneously updated, allowing for comprehensive environmental assessment. This ensures that route recalculations are based on a fully current and integrated understanding of the surroundings, minimizing collision risks and enabling more fluid and intelligent navigation through complex terrains or crowded airspaces. The LCM helps ensure that critical decisions are not made on stale or partial information, which is a cornerstone of safe and intelligent autonomous flight.
Resource Allocation in Edge Computing
As drones become more intelligent, they often carry out significant computational tasks onboard, leveraging edge computing capabilities. This can involve running multiple applications concurrently: real-time video processing, navigation algorithms, payload management, and communication protocols. Each of these processes might demand CPU cycles, memory, or bandwidth at different frequencies or in discrete bursts.
If one critical background process requires CPU allocation every 8 units of time and another high-priority foreground task needs resources every 12 units of time, conflicts can arise, leading to processing delays or system instability. By understanding the LCM of these resource demands (24 units), the drone’s operating system can implement an optimized scheduler that allocates resources efficiently, ensuring that all critical processes receive their required resources without contention. This innovative approach to resource management maximizes the performance of onboard computing, enabling drones to handle more complex tasks autonomously and reliably, even under demanding operational conditions.
Beyond the Basics: Advanced Applications and Future Prospects
While the LCM of 8 and 12 provides a tangible example, the underlying principle scales to far more complex scenarios, influencing advanced drone technologies and pointing towards future innovations. Its role extends into areas that are currently at the cutting edge of technological development.
Blockchain and Distributed Ledger Technology in Drones
The integration of Blockchain and Distributed Ledger Technology (DLT) in drones is an emerging area of innovation, particularly for secure data logging, autonomous supply chains, and establishing trust in multi-drone networks. If different nodes or drone participants in a DLT network update their ledgers or validate transactions at varying intervals (e.g., Drone A commits data every 8 blocks, Drone B every 12 blocks), establishing consensus and maintaining data integrity becomes a challenge. The LCM helps identify the earliest points where all nodes can synchronize their states or agree on a common ledger snapshot, which is vital for the robustness and reliability of decentralized drone operations. This mathematical basis ensures that distributed systems remain coherent and secure, even with asynchronous data generation.
Quantum Computing Implications (Conceptual)
Looking further into the future, as quantum computing begins to transition from theoretical to practical applications, the principles behind LCM could see fascinating new interpretations. While direct application of LCM might not be a quantum algorithm itself, the underlying need for synchronizing quantum states, optimizing the timing of quantum gate operations in a multi-qubit system, or finding common periods in highly complex, superposed computational processes could conceptually benefit from such fundamental cyclical alignment logic. In the pursuit of developing quantum-resistant encryption for drone communication or optimizing quantum sensor data processing, the abstract concept of finding common periods might find a home in designing highly complex, synchronized quantum algorithms that could revolutionize drone capabilities. This remains speculative but highlights how foundational mathematical concepts often reappear in unexpected ways at the vanguard of innovation.
Conclusion
The question “what is the LCM 8 and 12” appears deceptively simple, yet its answer, 24, unlocks a surprisingly wide array of applications within the complex and cutting-edge field of drone technology and innovation. From orchestrating synchronized maneuvers in multi-drone swarms and ensuring the coherent fusion of diverse sensor data to optimizing AI algorithms for autonomous flight and enhancing resource management, the Least Common Multiple serves as an invisible but indispensable algorithmic foundation.
As drones continue to evolve, becoming more autonomous, intelligent, and integrated into our daily lives, the principles of synchronization and efficient scheduling will only grow in importance. Understanding and applying basic mathematical concepts like LCM allows engineers and researchers to build more robust, reliable, and sophisticated systems. It underscores a crucial truth in technology: true innovation often stems from a deep understanding and creative application of fundamental principles, demonstrating that even the simplest mathematical tools can underpin the most advanced technological achievements in the skies above us.