In the rapidly evolving world of uncrewed aerial vehicles (UAVs), commonly known as drones, terms borrowed from fundamental physics often take on specialized and critical meanings. Among these, “displacement” stands out as a concept absolutely foundational to everything from a drone’s basic flight stability to its most complex autonomous missions. Far more than just a theoretical construct, displacement in drone flight technology is the precise vector quantity that defines an aircraft’s change in position relative to a reference point, providing crucial insights into its journey, purpose, and control.
Understanding displacement is not merely academic; it is the bedrock upon which sophisticated flight technology systems are built. Navigation, stabilization, autonomous flight planning, and even precision landing all hinge on the accurate measurement, calculation, and utilization of displacement data. Without a robust grasp of this principle, a drone would merely drift aimlessly, unable to execute programmed movements or even maintain a stable hover. This article delves into what displacement truly signifies within the realm of drone flight technology, exploring its critical distinction from distance, its role in various flight systems, and its profound impact on the future of autonomous aerial operations.
The Fundamental Concept of Displacement in Aeronautics
To appreciate displacement’s importance in drone technology, it’s essential to first establish a clear understanding of the concept itself, particularly how it differentiates from related terms and why this distinction is vital for airborne systems.
Displacement vs. Distance: A Critical Distinction
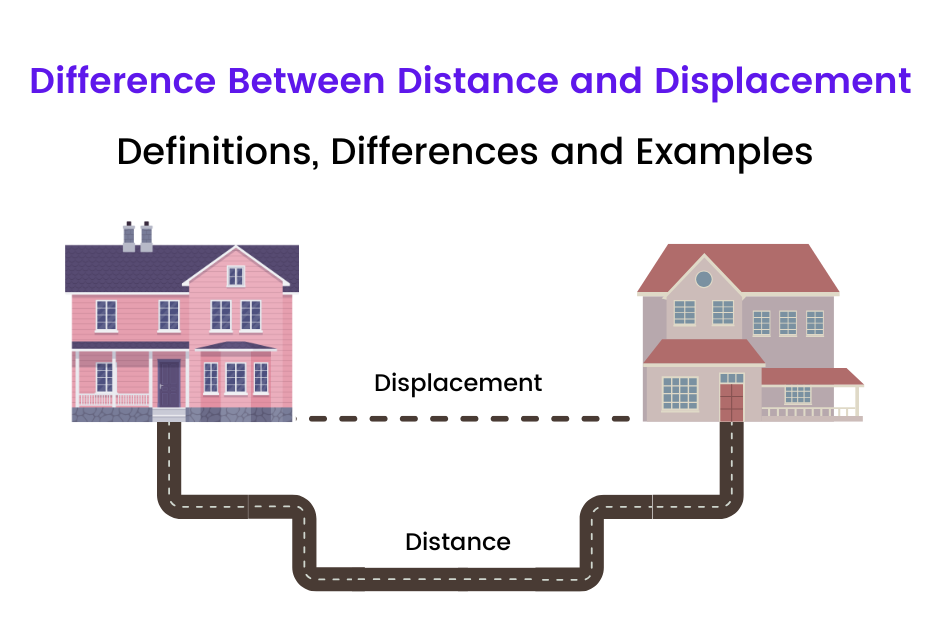
At its core, displacement is a vector quantity, meaning it possesses both magnitude (how much) and direction (where to). It represents the shortest straight-line path from a starting point to an ending point, irrespective of the actual path taken. Imagine a drone that takes off from its home base, flies around a building, performs a complex aerial maneuver, and then returns to precisely land back at its launch point. In this scenario, the drone’s total distance traveled might be several kilometers, tracing its entire meandering flight path. However, its total displacement from launch to landing would be zero, because its final position is identical to its initial position.
Conversely, if the drone flew directly from its home base to a target 100 meters due north, its displacement would be “100 meters, North.” Its distance traveled would also be 100 meters. This distinction is paramount in drone flight. While distance tells us about the energy expended or the total ground covered, displacement tells us exactly where the drone is relative to a specific origin or target. For navigation and control, knowing the drone’s precise displacement from a desired location is far more useful than knowing only the distance it has covered. This vector nature allows flight computers to calculate not just how far a drone has deviated, but in what direction it needs to correct itself.
Why Displacement Matters for Drone Flight Physics
In drone flight, displacement is intrinsically linked to other fundamental kinematic quantities: velocity and acceleration. Velocity is the rate of change of displacement, and acceleration is the rate of change of velocity. A drone’s flight controller continuously works with these values to maintain stable flight, execute commands, and navigate effectively.
- State Estimation: Modern flight controllers utilize sophisticated algorithms to estimate the drone’s current “state”—its position, velocity, and orientation—in three-dimensional space. Displacement is a key component of this state vector. By integrating acceleration data from inertial measurement units (IMUs) over time, and correcting these estimates with external references like GPS, the system continuously calculates the drone’s displacement from its known starting point or a global reference frame.
- Control Loops: To maintain a hover or follow a specific trajectory, the flight controller compares the drone’s measured displacement with its desired displacement. Any discrepancy (an error vector) triggers control actions—adjusting motor speeds and propeller thrust—to reduce this error and bring the drone back to its intended position or path. This constant feedback loop relies entirely on accurate displacement information.
- Predictive Modeling: Understanding displacement also allows for predictive modeling of the drone’s future position. By knowing its current displacement, velocity, and acceleration, the flight system can anticipate where the drone will be in the next few milliseconds, enabling smoother control inputs and proactive adjustments, especially crucial in high-speed maneuvers or adverse wind conditions.
Displacement’s Role in Drone Navigation and Positioning
The ability of a drone to know where it is, where it’s going, and where it has been is entirely dependent on its capacity to measure and calculate displacement. Various technologies and methodologies are employed to achieve this, each contributing to a more robust and accurate positioning system.
GPS and Relative Displacement Calculation
The Global Positioning System (GPS) is perhaps the most widely recognized tool for determining a drone’s position, and by extension, its displacement from a global reference. GPS receivers on drones triangulate their position by measuring the time delay of radio signals received from multiple orbiting satellites. Each satellite transmits its precise location and a timing signal. By knowing the exact time the signal was sent and received, the drone can calculate its distance to each satellite. With signals from four or more satellites, the drone’s absolute position (latitude, longitude, and altitude) can be determined with remarkable accuracy.
From this absolute position, the drone’s flight controller can easily calculate its displacement from its launch point (often designated as “home”) or any other arbitrary reference point. For example, if a drone takes off from coordinates (X0, Y0, Z0) and is currently at (X1, Y1, Z1), its displacement vector is simply (X1-X0, Y1-Y0, Z1-Z0). This allows for functions like “Return to Home,” where the drone calculates the displacement vector back to its initial position and flies along that path. High-precision GPS systems, such as RTK (Real-Time Kinematic) or PPK (Post-Processed Kinematic), further enhance displacement accuracy down to centimeter levels, critical for applications like precision agriculture or surveying.
Inertial Measurement Units (IMUs) and Dead Reckoning
While GPS provides global positioning, it can be susceptible to signal loss (e.g., indoors, under bridges, or in dense urban canyons) or intentional jamming. This is where Inertial Measurement Units (IMUs) become indispensable. An IMU typically consists of accelerometers and gyroscopes.
- Accelerometers measure the drone’s linear acceleration along its three axes (X, Y, Z). By integrating these acceleration readings over time, the flight controller can estimate changes in velocity. Integrating velocity over time then yields displacement.
- Gyroscopes measure angular velocity (rate of rotation) along the three axes, allowing the drone to determine its orientation (pitch, roll, yaw).
The process of estimating position based solely on IMU data is known as “dead reckoning.” While IMUs provide high-frequency data and are invaluable for short-term position updates and stabilization, they suffer from inherent drift. Small errors in acceleration measurements accumulate rapidly over time, leading to significant inaccuracies in estimated displacement. Therefore, IMU data is usually fused with GPS or other positioning systems to correct this drift, providing a robust and continuous estimate of the drone’s displacement.
Vision-Based Positioning and Optical Flow
For environments where GPS is unavailable or insufficient, or for highly localized precision, vision-based positioning systems offer an elegant solution. These systems use cameras to observe the environment and infer the drone’s motion and displacement.
- Optical Flow: This technique analyzes the movement of visual features across successive camera frames. By tracking how pixels or feature points shift, the system can estimate the drone’s velocity and, through integration, its displacement relative to the observed scene. Optical flow sensors are particularly effective for maintaining position in a hover, detecting sideways drift, and enabling stable flight indoors or close to the ground where visual textures are abundant.
- Visual Inertial Odometry (VIO): VIO systems combine visual data from cameras with inertial data from IMUs. By simultaneously processing both streams, VIO can achieve highly accurate real-time estimates of a drone’s position and orientation. The visual data helps correct the drift inherent in IMUs, while the IMU data provides high-frequency motion updates that smooth out visual noise or occlusions. This fusion provides a robust estimation of the drone’s displacement, crucial for complex autonomous tasks in GPS-denied environments.
- Feature-Based Localization (SLAM): Simultaneous Localization and Mapping (SLAM) algorithms build a map of an unknown environment while simultaneously tracking the drone’s position within that map. As the drone moves, it identifies and tracks unique visual features in its surroundings. By relating its current view to previously seen features, it can calculate its displacement and update the map, allowing for extended autonomous operation in complex, unfamiliar spaces.
Applying Displacement in Drone Control and Autonomy
Beyond simply knowing where it is, a drone must actively use displacement information to perform tasks, from maintaining a stable hover to executing intricate flight patterns. This is where the control and autonomy aspects come into play.
Flight Path Planning and Waypoint Navigation
Autonomous drone missions often involve following a predefined flight path, which is typically broken down into a series of waypoints. Each waypoint represents a specific target displacement from the drone’s starting point or a global reference. The flight controller’s job is to calculate the displacement vector from the drone’s current position to the next waypoint and then generate the necessary motor commands to follow that vector.
For instance, if a drone is at waypoint A and needs to go to waypoint B, the system calculates the displacement from A to B. It then continuously adjusts the drone’s velocity and attitude to align with this displacement vector, ensuring it reaches waypoint B accurately. Complex flight paths might involve numerous waypoints, with the drone calculating displacement segment by segment, ensuring efficient and precise trajectory execution for tasks like mapping grids, inspection routes, or delivery operations.
Stabilization Systems and Drift Correction
One of the most immediate and vital applications of displacement sensing is in a drone’s stabilization system. When a drone is intended to hover in place, any external disturbance—a gust of wind, prop wash, or slight imbalances—will cause an unwanted displacement from its desired stationary position. The flight controller, using data from IMUs, GPS, and potentially optical flow sensors, continuously detects these subtle displacements.
Upon detecting a drift, the system calculates the displacement error vector (the difference between the desired and actual position). It then rapidly adjusts the thrust of individual motors to generate a counteracting force, pushing the drone back towards its intended position. This constant, high-frequency feedback loop, driven by precise displacement measurements, is what allows modern drones to maintain remarkably stable hovers, even in challenging conditions.
Obstacle Avoidance and Trajectory Redirection
As drones become more autonomous, their ability to perceive and react to their environment is paramount. Obstacle avoidance systems use sensors like ultrasonic, lidar, radar, or vision cameras to detect objects in the drone’s flight path. Once an obstacle is detected, the system calculates the drone’s displacement relative to the obstacle and the obstacle’s displacement relative to the drone.
Based on this information, the drone’s autonomous navigation system re-plans its trajectory to create a new, safe displacement path around the obstacle. This might involve a slight change in altitude, a lateral maneuver, or a complete detour, all while calculating the necessary displacement vectors to safely navigate the airspace and continue towards its original target. This dynamic recalculation of displacement is critical for preventing collisions and enabling drones to operate safely in complex environments.
The Future of Displacement Sensing and Utilization
The quest for ever-greater autonomy and precision in drone operations continues to push the boundaries of displacement sensing and utilization. Future developments promise even more sophisticated ways for drones to understand their spatial relationship with the world.
Enhanced Sensor Fusion and Kalman Filters
The combination of various sensor inputs (GPS, IMU, cameras, lidar, etc.) through advanced algorithms like Kalman filters or particle filters is key to achieving highly accurate and robust displacement estimates. These filters intelligently weigh the data from different sensors, accounting for their individual strengths and weaknesses, to produce the most probable displacement state. Future advancements will focus on developing even more sophisticated sensor fusion techniques, potentially incorporating novel sensor types, to achieve unprecedented levels of accuracy and reliability in displacement tracking, even in challenging or dynamic environments.
Advanced Autonomous Missions and Swarm Robotics
With improved displacement sensing comes the potential for vastly more complex autonomous missions. This includes long-endurance flights over vast, featureless terrains where drift accumulation is a major concern, or intricate inspection tasks requiring sub-centimeter positioning accuracy. The true power of precise displacement control will be unleashed in swarm robotics, where multiple drones need to coordinate their movements with extreme precision. Each drone must accurately track its own displacement relative to its neighbors and the overall swarm objective, enabling complex synchronized maneuvers, collaborative mapping, and distributed sensing tasks.
Precision Landing and Docking
One of the ultimate challenges in drone autonomy is precision landing and automatic docking. This requires extremely accurate displacement control in the final stages of flight. Imagine drones autonomously returning to charge stations, landing on moving platforms, or delivering packages to precise drop-off points. Such tasks demand real-time displacement measurements with millimeter-level accuracy, often achieved through a combination of local positioning systems (e.g., optical markers, ultra-wideband radio) and refined control algorithms. The ability to precisely control displacement will unlock a new era of fully automated drone operations.
In conclusion, “what is displacement” is far more than a simple physics question for drone flight technology; it is a gateway to understanding the very essence of how these incredible machines navigate, stabilize, and operate autonomously. From differentiating it from mere distance to its intricate applications in GPS, IMUs, vision systems, and complex autonomous behaviors, displacement is the fundamental vector that orchestrates every aerial maneuver. As drone technology continues its exponential growth, the precision with which we measure, calculate, and apply displacement will remain at the forefront of innovation, paving the way for safer, more efficient, and increasingly intelligent aerial systems.