In the world of unmanned aerial vehicles (UAVs), the terms “mass” and “weight” are frequently used as synonyms. However, for the engineers, developers, and pilots who push the boundaries of flight technology, these two terms represent distinct physical properties that dictate everything from battery efficiency to flight stability. Understanding the nuance between mass—the measure of an object’s inertia—and weight—the force exerted by gravity—is essential for optimizing stabilization systems, navigation algorithms, and the structural integrity of modern drones.
As drone technology evolves toward more autonomous and specialized applications, the physics governing these machines becomes increasingly complex. Whether a drone is hovering in the thin air of the Himalayas or performing high-speed maneuvers in a racing circuit, the interplay between its mass and the gravitational force acting upon it determines the limits of its performance. This article explores the critical differences between mass and weight through the lens of flight technology and explains why this distinction is the cornerstone of aerial engineering.
Defining the Core Concepts: Mass and Weight in the Cockpit
To understand how a drone stays aloft, one must first strip away the colloquialisms and look at the raw physics. In the vacuum of space, a drone still has mass, but it essentially has no weight. In the atmosphere, both forces are in a constant tug-of-war with the drone’s propulsion system.
Mass: The Universal Constant of Inertia
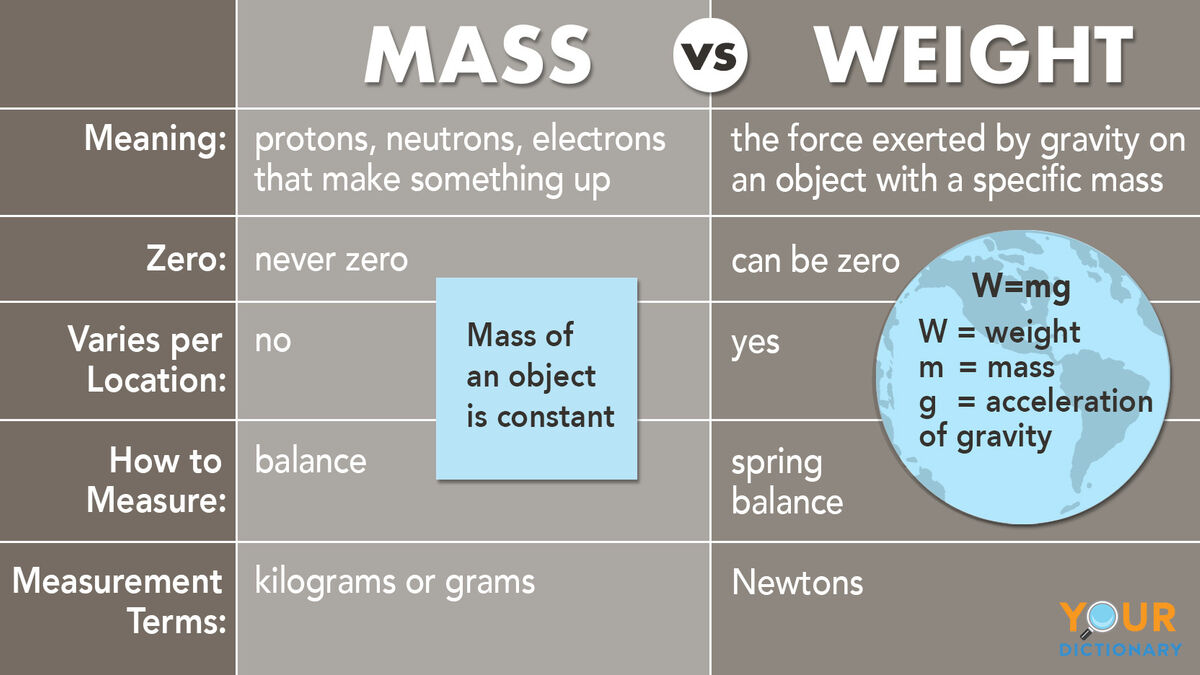
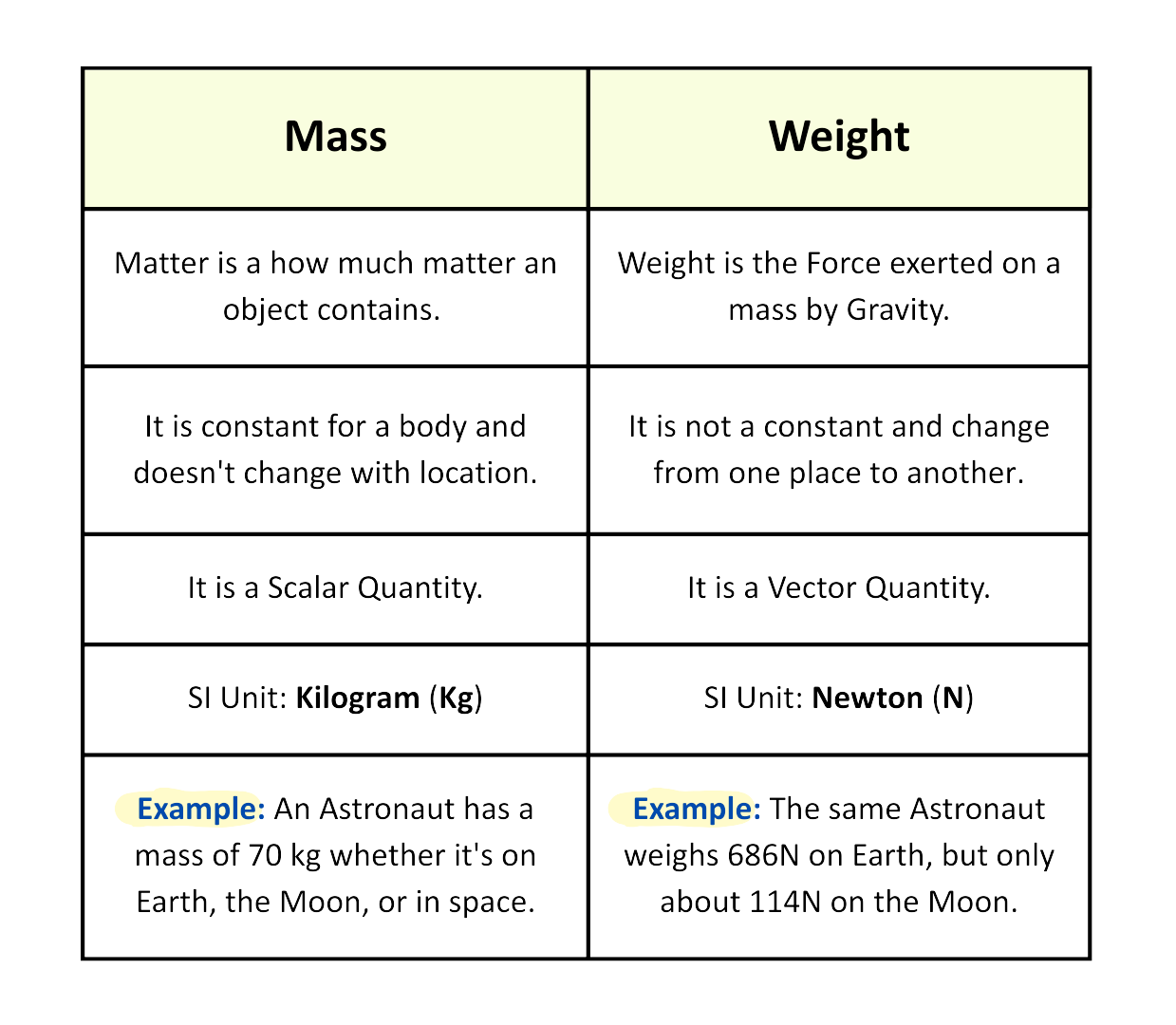
Mass is an intrinsic property of the drone. It is the sum total of every carbon fiber weave, every copper winding in the brushless motors, and every silicon chip on the flight controller. Measured in kilograms (kg), mass does not change regardless of where the drone is located.
In flight technology, mass is primarily synonymous with inertia. According to Newton’s First Law, an object at rest stays at rest unless acted upon by a force. The greater the mass of a drone, the more force is required to change its state of motion. For high-speed FPV (First Person View) racing drones, minimizing mass is the primary goal because a lower mass allows for instantaneous changes in direction. Conversely, for industrial mapping drones, a certain amount of mass can be beneficial, providing the structural “heft” needed to resist being buffeted by minor wind gusts.
Weight: The Dynamic Force of Gravity
Weight is not an inherent property; it is a force. It is the result of gravity acting upon a drone’s mass ($W = m times g$). Because weight is a force, it is technically measured in Newtons (N), though in the drone industry, it is often expressed in “grams of lift” for simplicity.
Unlike mass, weight is variable. A drone weighing 1.5 kg at sea level will technically weigh slightly less at the top of Mount Everest because it is further from the Earth’s center of gravity. More importantly for flight technology, “apparent weight” changes during maneuvers. When a drone pulls out of a steep dive, the centrifugal forces increase its apparent weight, requiring the flight controller to demand significantly more thrust from the motors than is needed for a simple hover.
The Impact on Flight Dynamics and Stabilization Systems
The distinction between mass and weight is most apparent when looking at how a drone maintains its position in the sky. Stabilization systems, specifically the Flight Controller (FC) and the Inertial Measurement Unit (IMU), are designed to manage these two forces in real-time.
Momentum and Maneuverability
The mass of a drone dictates its momentum ($p = mv$). In flight technology, managing momentum is the key to precise navigation. When a drone is moving at 50 mph, its mass wants to keep it moving in that direction. To stop or turn, the propulsion system must generate enough force to overcome that inertia.
Advanced flight controllers use PID (Proportional-Integral-Derivative) loops to calculate how much power to send to the motors to counteract this momentum. If a drone is too “massive,” it will suffer from “overshoot,” where it carries past its intended stopping point. Engineers must balance the mass of the airframe against the torque of the motors to ensure that the stabilization system remains “locked-in” and responsive.
The Role of the IMU and Flight Controller
The IMU is the heart of a drone’s stabilization, consisting of accelerometers and gyroscopes. The accelerometer measures the force of gravity (weight) to determine which way is “down.” However, it also measures the forces generated by the drone’s own acceleration.
Sophisticated flight technology uses “sensor fusion” to distinguish between the constant pull of weight and the temporary forces of movement. By understanding the fixed mass of the drone, the flight controller can calculate exactly how much thrust is required to overcome the current weight. If the drone is carrying a heavy payload (increasing its mass and thus its weight), the flight controller must adjust its “gain” settings. This is why many professional drones require a “tuning” process when a new camera or sensor is added; the system must learn the new mass-to-weight ratio to maintain flight stability.

Power Management and the Lift-to-Weight Ratio
In aerial engineering, the “Lift-to-Weight Ratio” is perhaps the most important metric for determining a drone’s performance and endurance. Because weight is the force that gravity exerts downward, the drone must produce an equal or greater upward force (lift) to stay airborne.
Battery Efficiency and Energy Density
The relationship between mass and weight directly impacts battery life. Every gram of mass added to a drone increases the weight that the motors must lift. To lift more weight, the motors must spin faster, drawing more current from the battery. This creates a “diminishing returns” scenario: adding a larger battery increases energy capacity (mass), but it also increases the weight of the drone, which in turn consumes more energy to keep the drone in the air.
Flight technology innovators are constantly looking for ways to reduce mass without sacrificing the structural integrity of the drone. The use of high-modulus carbon fiber and integrated circuitry helps keep the mass low, ensuring that the majority of the “weight budget” can be allocated to the battery and specialized sensors rather than the airframe itself.
Propeller Pitch and Motor Torque Requirements
The drone’s propulsion system is designed based on the expected weight it will carry. Weight determines the “hover point”—the throttle percentage at which the drone maintains a steady altitude. Ideally, a well-engineered drone should hover at approximately 50% throttle.
If the weight is too high relative to the motor’s torque and the propeller’s pitch, the drone will be “underpowered.” This means the motors have to work near their maximum capacity just to stay level, leaving very little “overhead” for maneuvering or resisting wind. Understanding the difference between the drone’s dry mass (without accessories) and its take-off weight (TOW) allows engineers to select the perfect combination of motor KV ratings and propeller dimensions to maximize flight efficiency.
Environmental Variables and Altitude Challenges
One of the most complex aspects of drone flight technology is dealing with environments where the relationship between mass and weight is tested by external factors like atmospheric density and localized gravity.
Flying at Sea Level vs. High Altitudes
While a drone’s mass stays the same at high altitudes, the way it interacts with the air changes. At high altitudes, the air is less dense. While the weight of the drone (the gravitational pull) remains nearly the same, the “lift” generated by the propellers decreases because there are fewer air molecules to push down.
This requires the flight technology to work harder. To compensate for the “thin” air, propellers must spin faster to generate the same amount of lift required to offset the drone’s weight. Many modern drones now include barometric pressure sensors and GPS-linked altitude tables that allow the flight controller to automatically adjust motor outputs to compensate for these changes in air density, ensuring the pilot experiences consistent handling regardless of elevation.
Microgravity and Specialized UAV Applications
As UAV technology expands into extraterrestrial exploration—such as the Ingenuity Mars Helicopter—the distinction between mass and weight becomes life-or-death. On Mars, the gravity is only about 38% of Earth’s. A drone with a mass of 1 kg on Earth still has a mass of 1 kg on Mars, but its weight is significantly lower.
However, the Martian atmosphere is 1% as thick as Earth’s. In this scenario, the drone’s mass (and the inertia that comes with it) is the primary challenge for the stabilization system, while the reduced weight offers a slight reprieve for the propulsion system. This extreme example highlights why flight technology must be developed with a rigorous understanding of these two distinct physical properties.
Designing for the Future: Minimizing Weight without Sacrificing Mass Integrity
The future of drone technology lies in the development of “smart materials” and advanced AI that can manage the mass-weight dynamic more efficiently than ever before. We are seeing a move toward generative design, where AI creates airframe structures that provide maximum strength with minimum mass.
In the realm of autonomous flight, “Mass Estimation Algorithms” are becoming standard. These software systems allow a drone to “feel” its own weight during the first few seconds of take-off. By measuring how much power is required to lift off, the drone can estimate its total mass and adjust its flight characteristics on the fly. This is particularly useful for delivery drones, which may carry packages of varying masses on every flight.
By mastering the difference between mass and weight, drone flight technology has moved from simple remote-controlled toys to sophisticated autonomous robots capable of precision tasks in the most demanding environments on Earth—and beyond. As we continue to reduce the mass of components and increase the efficiency of our lift systems, the gap between what is “too heavy” to fly and what is “light enough” to soar continues to widen, opening up new possibilities for the future of aviation.