The coefficient of static friction is a fundamental concept in physics that describes the property of surfaces in contact that resists the initiation of motion between them. While it might sound like a niche academic term, understanding its implications is crucial for a wide range of technological applications, from the mechanics of everyday objects to the sophisticated designs of advanced machinery. This article will delve into the definition, influencing factors, calculation, and practical significance of the coefficient of static friction, particularly as it pertains to the realm of Tech & Innovation, specifically in the context of autonomous systems and robotic locomotion.
Understanding the Basics of Static Friction
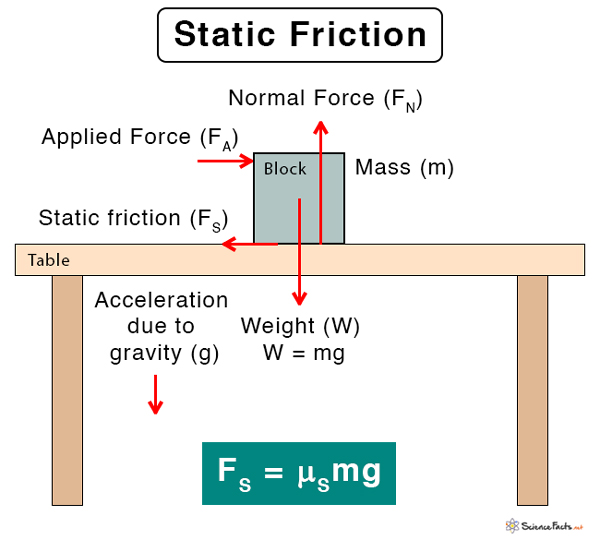
Static friction is the force that prevents an object from starting to move when a force is applied to it. Imagine trying to push a heavy box across the floor. Initially, as you apply a small amount of force, the box remains still. This is due to static friction, a force acting in the opposite direction to your push, counteracting it. As you increase your pushing force, the static friction also increases, up to a certain limit. If your pushing force exceeds this maximum static friction, the box will begin to slide.
The Force of Static Friction
The force of static friction, denoted as $fs$, is not a constant value. It is a variable force that adjusts itself to oppose the applied force, as long as motion has not yet begun. The maximum possible static friction, $f{s,max}$, is the threshold that must be overcome to initiate movement. This maximum force is directly proportional to the normal force ($F_N$) acting between the two surfaces. The normal force is the perpendicular force exerted by a surface on an object in contact with it. For an object resting on a horizontal surface, the normal force is typically equal to the object’s weight.
The Coefficient of Static Friction
The coefficient of static friction, represented by the Greek letter $mu_s$, is a dimensionless quantity that quantifies the “stickiness” or the inherent frictional properties between two specific surfaces in contact. It is a property of the materials themselves, independent of the area of contact or the applied force (within certain limits). The formula that relates the maximum static friction to the normal force is:
$f{s,max} = mus cdot F_N$
This equation highlights that for a given pair of surfaces (and thus a specific $mu_s$), a larger normal force will result in a greater maximum static friction. Conversely, if the normal force is small, the maximum static friction will also be small.
Factors Influencing the Coefficient of Static Friction
The value of $mu_s$ is not universal and depends on several critical factors:
- Nature of the Surfaces: This is the most significant factor. Different materials have vastly different coefficients of friction. For instance, rubber on dry asphalt will have a much higher $mu_s$ than ice on ice. The microscopic roughness and the molecular interactions between the surfaces play a crucial role.
- Surface Condition: Even for the same materials, the condition of the surfaces can alter $mu_s$. Clean, dry surfaces generally exhibit higher friction than wet or oily surfaces. The presence of contaminants, lubricants, or even dust can significantly reduce the coefficient.
- Temperature: While often a secondary effect, temperature can influence the molecular behavior of materials and, consequently, their frictional properties. Extreme temperatures can cause materials to become softer or harder, affecting $mu_s$.
- Pressure: At very high pressures, the deformation of softer materials can increase the contact area, potentially leading to a slight increase in static friction. However, for most practical applications, the coefficient is considered independent of pressure.
Calculating and Measuring the Coefficient of Static Friction
Determining the coefficient of static friction for a given scenario is often achieved through experimental methods. These methods are vital for engineers designing systems where predictable traction and stability are paramount.
Experimental Determination
A common method to measure $mu_s$ involves using an inclined plane.
-
Setup: Place an object of interest on a flat surface that can be gradually tilted.
-
Tilting: Slowly increase the angle of inclination of the surface.
-
Observation: Observe the angle at which the object just begins to slide. This angle is known as the angle of repose ($theta$).
-
Calculation: At the point of impending motion, the component of the object’s weight acting parallel to the inclined plane is equal to the maximum static friction. The normal force is the component of weight perpendicular to the plane. Using trigonometry, it can be shown that:
$F{applied} = mg sin(theta)$ (force pulling the object down the slope)
$FN = mg cos(theta)$ (normal force)
$f{s,max} = mus cdot F_N$At the verge of sliding, $F{applied} = f{s,max}$. Therefore:
$mg sin(theta) = mu_s cdot mg cos(theta)$
Simplifying by dividing both sides by $mg cos(theta)$:
$mus = frac{sin(theta)}{cos(theta)}$
$mus = tan(theta)$
Thus, the coefficient of static friction is equal to the tangent of the angle of repose.
Importance in Engineering and Design
Accurate measurement of $mus$ is fundamental for designing systems that require controlled movement or prevent unwanted slippage. In robotics, for example, understanding the friction between a robot’s wheels or grippers and various surfaces is essential for tasks such as locomotion, manipulation, and gripping. For autonomous vehicles, knowing the $mus$ between tires and road surfaces under different conditions (dry, wet, icy) is critical for developing effective traction control systems and ensuring safe navigation.
Practical Applications in Tech & Innovation
The coefficient of static friction plays a subtle yet critical role in numerous technological advancements, particularly in areas involving intelligent motion and autonomous operation.
Robotics and Autonomous Navigation
In the field of robotics, particularly for ground-based or legged robots, $mu_s$ is a primary determinant of mobility.
- Locomotion: For wheeled robots, the ability to accelerate, decelerate, and turn without slippage relies heavily on the static friction between the wheels and the ground. High $mus$ values allow for greater acceleration and tighter turns. Autonomous navigation systems must account for variations in $mus$ to avoid skidding or getting stuck. Imagine a Mars rover needing to traverse rocky, uneven terrain; its designers must have a precise understanding of the $mu_s$ between its wheels and Martian regolith.
- Manipulation: Robotic arms and grippers utilize static friction to hold objects. The gripping force required to lift an object is directly related to the $mus$ between the gripper surfaces and the object’s surface. If $mus$ is too low, the object will slip out of the grip. Advanced robotic systems use tactile sensors to estimate friction and adjust grip force dynamically.
- Balance and Stability: For legged robots, maintaining balance involves complex control algorithms that consider forces and torques. Static friction at the foot-ground interface is crucial for providing the necessary reaction forces to prevent the robot from toppling.
Advanced Material Science and Surface Engineering
The continuous drive for innovation in tech often involves developing new materials or modifying existing ones to achieve specific frictional properties.
- Frictionless or Low-Friction Surfaces: In some applications, such as high-speed manufacturing or advanced bearing systems, minimizing friction is key to reducing energy loss and wear. This involves developing materials with inherently low $mu_s$ or applying coatings that achieve this effect.
- High-Friction Surfaces: Conversely, for applications requiring extreme grip, such as in climbing robots, specialized treads, or emergency braking systems, materials with exceptionally high $mu_s$ are engineered. This might involve designing surfaces with complex microstructures or using materials like specialized rubbers and composites.
AI and Predictive Control
The integration of artificial intelligence (AI) with robotics and autonomous systems allows for more sophisticated control strategies that explicitly account for friction.
- Friction Modeling: AI algorithms can learn and adapt to changing frictional conditions. By analyzing sensor data (e.g., wheel slippage, motor torque), an AI can build a dynamic model of $mu_s$ for its environment and adjust its control parameters in real-time. This is particularly important for systems operating in unpredictable outdoor environments.
- Path Planning: Advanced path planning algorithms can incorporate friction models to optimize routes for energy efficiency and speed, ensuring that the chosen path is traversable without excessive slippage. For instance, an autonomous delivery robot might choose a slightly longer but less slippery route in wet conditions.
- Human-Robot Interaction: In collaborative robots, understanding friction is also important for safety. If a robot is designed to exert force on an object held by a human, the $mu_s$ between the robot’s gripper and the object, as well as the potential for unexpected sliding, needs to be carefully managed to prevent injury.
The Coefficient of Static Friction in Dynamic Systems
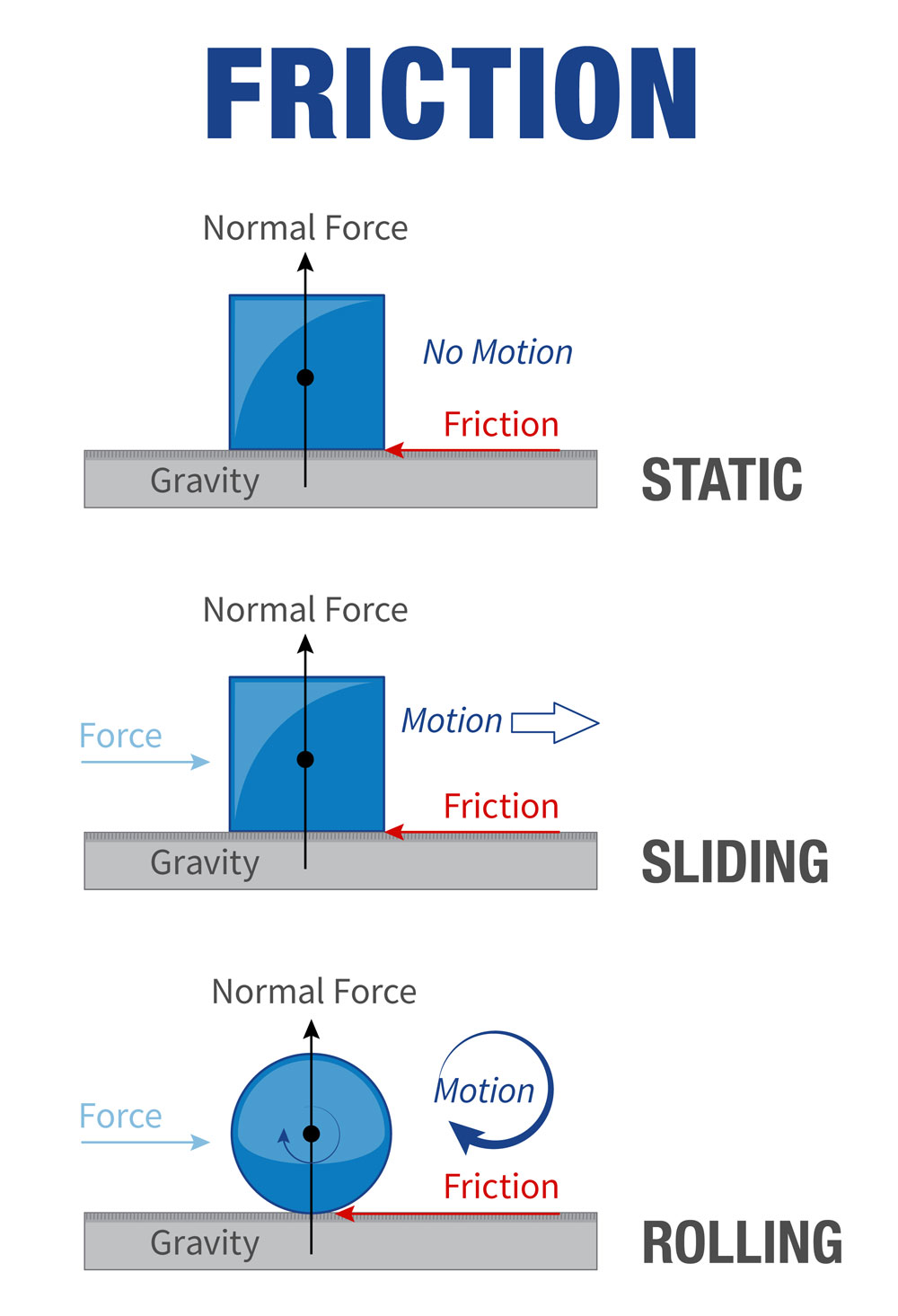
While this article focuses on static friction, it’s important to acknowledge its close relative: kinetic friction.
Static vs. Kinetic Friction
Static friction is the force that prevents motion. Once an object begins to move, the friction acting between the surfaces changes to kinetic friction ($fk$). Kinetic friction is generally less than the maximum static friction ($f{s,max}$). This is why it’s often easier to keep an object moving than to get it started. The coefficient of kinetic friction is denoted by $mu_k$, and the relationship is:
$fk = muk cdot F_N$
The relationship between the two coefficients is typically $muk < mus$. This difference is due to the fact that when surfaces are sliding against each other, the microscopic asperities (tiny bumps and irregularities) have less time to interlock, leading to a reduced resistance to motion.
Implications for Control Systems
The transition from static to kinetic friction is a critical point in the design of control systems. For example, in an anti-lock braking system (ABS) for vehicles, the goal is to maintain braking force close to the point of impending slip, maximizing deceleration without locking the wheels entirely. This involves oscillating the braking pressure to keep the tires at the boundary between static and kinetic friction. Similarly, robotic systems aim to operate within the static friction regime for precise positioning and manipulation, while understanding the threshold at which kinetic friction takes over to prevent loss of control.

Conclusion: The Unseen Force Driving Innovation
The coefficient of static friction, though seemingly a simple physical property, underpins the functionality of countless technological innovations. From the autonomous robots navigating our world to the sophisticated systems that ensure stability and control, this fundamental concept guides design, enables complex maneuvers, and pushes the boundaries of what is possible. By understanding and precisely controlling the forces that resist the initiation of motion, engineers and innovators continue to develop smarter, more capable, and more reliable technologies that shape our future. The unseen force of static friction is, in essence, a silent, yet powerful, engine of technological progress.