In the rapidly evolving world of drone technology, where autonomous flight, precision navigation, and intelligent decision-making are becoming standard, the underlying mathematical principles that govern these capabilities often remain unseen. One such fundamental concept, critical to nearly every advanced function in modern unmanned aerial vehicles (UAVs), is the system of linear equations. Far from being an abstract academic exercise, these mathematical structures are the silent architects of the sophisticated algorithms that allow drones to fly, sense, map, and interact with their environment with unprecedented autonomy and accuracy.
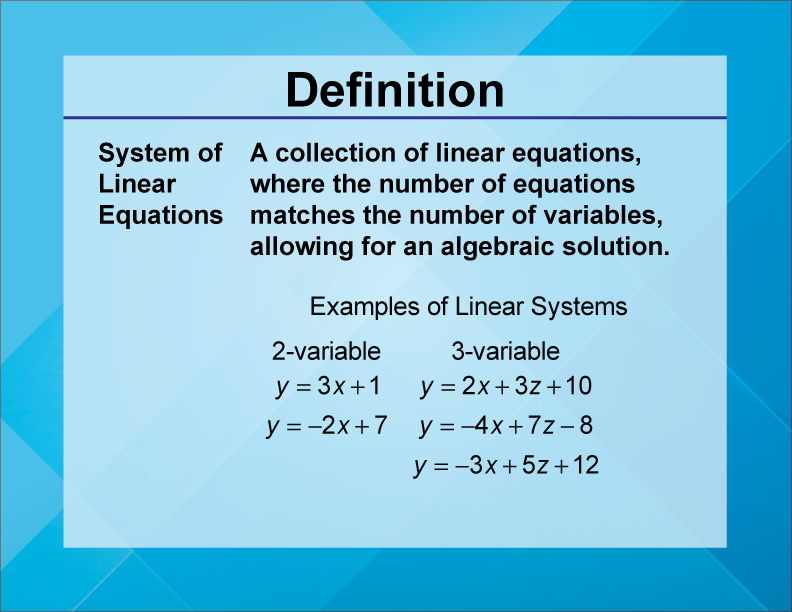
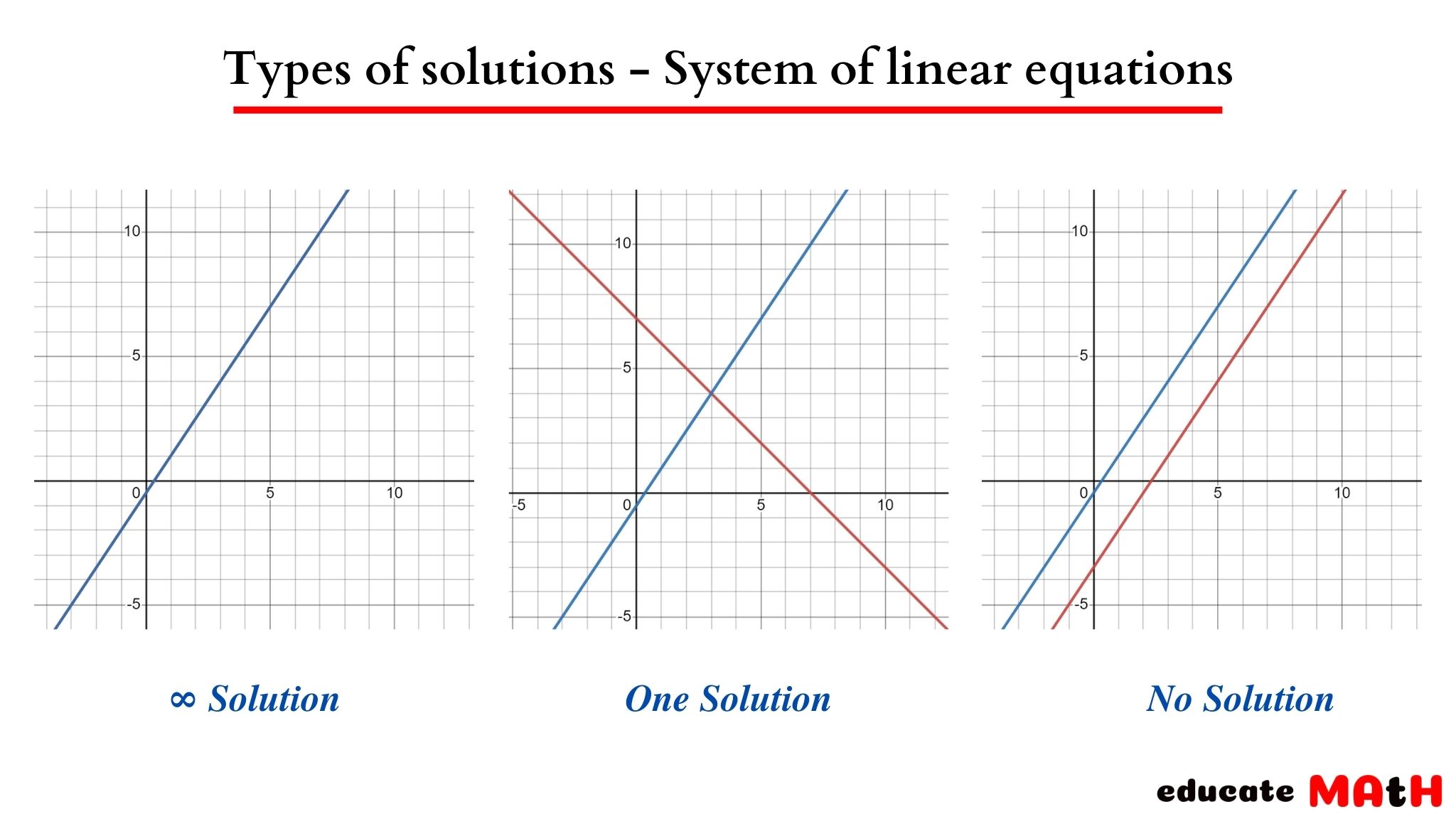
At its core, a system of linear equations is a set of two or more linear equations involving the same variables. A linear equation is an algebraic equation in which each term is either a constant or the product of a constant and a single variable (e.g., ax + by = c). When you have multiple such equations, all needing to be true simultaneously for a given set of variables, you have a system. The “solution” to such a system is the set of values for those variables that satisfies all equations concurrently. While this definition might sound simple, its application in real-world engineering, particularly in the complex domain of drone technology and innovation, is profoundly impactful.
In the context of modern tech, especially drones, these systems are not merely solved on paper; they are continuously processed by powerful onboard computers to make split-second decisions. Whether a drone is calculating its precise location, stabilizing itself against turbulent winds, identifying objects on the ground, or constructing a 3D map of its surroundings, it is almost certainly relying on the rapid and efficient solution of countless systems of linear equations. This article will delve into how this foundational mathematical concept underpins the groundbreaking innovations in drone technology, from autonomous flight to sophisticated AI capabilities.
The Mathematical Blueprint for Drone Autonomy
The dream of fully autonomous drones capable of complex tasks without human intervention rests heavily on their ability to accurately perceive their state (position, velocity, orientation) and react intelligently to their environment. This perception and reaction cycle is fundamentally built upon solving mathematical models, with linear equations playing a central role due to their computational tractability and robustness.
Defining Linear Equations in a Practical Context
Imagine a drone needs to determine its position. It might receive signals from multiple GPS satellites, each providing a measurement of distance. Each measurement, when combined with the known position of the satellite, can be formulated as an equation. If the drone’s position (x, y, z) is unknown, and it has several distance measurements (d1, d2, d3…) from known satellite positions (sx1, sy1, sz1), you can start to build a system. While the initial distance formula (which involves square roots) is non-linear, linearization techniques are frequently employed to transform these complex relationships into linear equations for easier, faster, and more reliable computation, especially in real-time scenarios. This process of linearization is a common mathematical trick used throughout drone autonomy.
Furthermore, within a drone’s internal sensors, such as accelerometers and gyroscopes (part of the Inertial Measurement Unit or IMU), the relationships between sensor readings and the drone’s true physical motion can often be approximated or modeled using linear equations. For example, if you know the thrust generated by each motor, you can model the resulting forces and torques on the drone’s body using linear relationships to predict its acceleration and angular velocity. The accuracy of these models is paramount for stable flight.
Why Simplicity (Linearity) is Key for Complex Systems
The world is inherently non-linear. However, linear models are preferred in many computational tasks because they offer significant advantages:
- Computational Efficiency: Linear systems can be solved very quickly and efficiently, even with a large number of variables. This is crucial for real-time applications in drones where decisions must be made in milliseconds. Algorithms like Gaussian elimination or LU decomposition are highly optimized for this.
- Predictability and Stability: Linear systems are well-understood mathematically. Their behavior is predictable, which helps in designing stable control systems. Small changes in inputs lead to proportionally small changes in outputs, making them easier to manage.
- Robustness: While approximations, linear models often provide sufficiently accurate solutions within certain operating ranges. Techniques like Kalman filtering, which extensively uses linear algebra, are incredibly robust against sensor noise and uncertainties.
- Foundation for Optimization: Many optimization problems, from path planning to resource allocation, are either formulated directly as linear programs or rely on iterative linearization techniques to find optimal solutions.

Without the ability to quickly and reliably solve systems of linear equations, the computational demands of truly autonomous flight would be insurmountable for current onboard processors.
Precision Navigation and Control: Steering Drones with Math
The ability of a drone to know where it is, how it’s moving, and to precisely execute flight commands is a testament to sophisticated control and navigation systems, all of which lean heavily on systems of linear equations.
Sensor Fusion: Merging Data for a Single Truth
A drone’s navigation system rarely relies on a single sensor. Instead, it employs a technique called sensor fusion, combining data from multiple sources like GPS, IMUs (accelerometers, gyroscopes, magnetometers), barometers, and even optical flow sensors or LiDAR. Each sensor has its strengths and weaknesses (e.g., GPS is accurate for position but slow, IMUs are fast but drift over time).
To get the most accurate estimate of the drone’s state (position, velocity, orientation), an algorithm like the Kalman filter is often used. The Kalman filter is a powerful recursive algorithm that estimates the state of a system from a series of incomplete and noisy measurements. At its heart, the Kalman filter works by continually predicting the next state of the system using a linear model, then correcting that prediction based on new sensor measurements, also modeled linearly. This process involves solving systems of linear equations to weight the confidence in predictions versus measurements, effectively blending diverse data streams into a single, highly accurate, and robust estimate of the drone’s true state.
Dynamic Control Systems: Keeping Drones Stable and Responsive
Once a drone knows its current state, it needs to adjust its motor speeds and propeller thrusts to achieve a desired state (e.g., hover, move forward, turn). This is the role of the flight controller, which implements control systems. A common approach is to use Proportional-Integral-Derivative (PID) controllers or more advanced model predictive control (MPC) systems.
For complex maneuvers or to counteract external disturbances like wind gusts, the flight controller needs to solve a system that relates the desired change in position/orientation to the required adjustments in motor power. For example, if the drone needs to pitch up, specific motors need to increase thrust while others decrease. This relationship can be modeled as a system of linear equations, where the variables are the changes in thrust for each motor, and the equations represent the desired torques and forces on the drone body. Solving this system allows the flight controller to issue precise commands to the electronic speed controllers (ESCs) and motors, ensuring stable and responsive flight.
Path Planning and Optimization: Finding the Best Route
Autonomous drones often need to navigate complex environments, avoiding obstacles and reaching specific waypoints. This involves path planning – determining an optimal trajectory. While the high-level planning might involve graph theory or heuristic search algorithms, the finer details of optimizing a path (e.g., minimizing energy consumption, flight time, or deviation from a smooth curve) often involve solving systems of linear equations.
For instance, if a drone needs to fly between two points while avoiding a known set of obstacles, the problem can be formulated as a set of linear inequalities. Finding a feasible path that satisfies all these conditions (representing safe distances from obstacles and respecting flight constraints) often boils down to solving linear programming problems, which are specialized forms of linear equation systems. Even in situations where paths are curved, they can often be approximated by a series of linear segments, allowing linear optimization techniques to be applied.
Seeing and Understanding: Systems in Mapping and Imaging
Drones are increasingly used for surveying, mapping, inspection, and surveillance. Their ability to gather vast amounts of visual and spatial data from unique aerial perspectives hinges on sophisticated imaging and computational techniques, many of which are rooted in linear algebra.
Photogrammetry and 3D Reconstruction: Building Models from Pixels
Photogrammetry is the science of making measurements from photographs. Drones equipped with high-resolution cameras capture overlapping images of a terrain or structure. To transform these 2D images into accurate 3D models or maps, complex calculations are performed to determine the camera’s precise position and orientation at the moment each photo was taken, as well as the 3D coordinates of points in the environment.
This process involves solving massive systems of linear equations. Each identifiable point in an image (a feature point) provides equations relating its 2D pixel coordinates to its unknown 3D world coordinates and the unknown camera pose (position and orientation). By identifying the same feature points across multiple images, a highly overdetermined system of linear equations is formed. Solving this system (often using techniques like bundle adjustment, which iteratively solves linearized versions of the problem) allows for the precise triangulation of 3D points and accurate reconstruction of the scene. Without the ability to solve these systems efficiently, 3D mapping and modeling from drone imagery would be impossible.
Object Detection and Tracking: Identifying and Following Targets
In applications like security, search and rescue, or precision agriculture, drones need to identify specific objects (e.g., missing persons, crop anomalies, vehicles) and often track their movement. Modern object detection algorithms, particularly those based on deep learning, employ vast neural networks. While the training phase of these networks is highly non-linear, the inference phase (when the drone is actually detecting objects) involves numerous matrix multiplications and linear transformations.
Furthermore, for object tracking, Kalman filters (and their non-linear extensions like Extended Kalman Filters) are frequently used. Once an object is detected, its motion can be predicted using a linear model, and subsequent detections are fused with these predictions to maintain a robust and smooth track of the object, even if it briefly goes out of sight or if detections are noisy. Again, these filters rely on continuously solving systems of linear equations to update the object’s estimated state (position, velocity).
Obstacle Avoidance: Calculating Safe Trajectories in Real-Time
For a drone to fly autonomously and safely in complex environments, it must detect obstacles and plan avoidance maneuvers in real-time. This often involves processing data from LiDAR, ultrasonic sensors, or stereo cameras to build a local map of the environment.
When an obstacle is detected, the drone’s flight controller must rapidly calculate a new, collision-free trajectory. This can involve defining a “safe zone” or “no-fly zone” around obstacles using linear inequalities. The problem then becomes finding the optimal path segments that stay outside these zones while moving towards the target. These are often framed as constrained optimization problems solvable using linear programming methods, which, at their heart, solve large systems of linear equations and inequalities to determine feasible and optimal flight paths.
Driving Innovation: Machine Learning and AI in Drone Operations
The cutting edge of drone technology—AI follow mode, autonomous decision-making, and intelligent data analysis—is deeply intertwined with machine learning. And machine learning, despite its often-complex appearance, is heavily reliant on linear algebra and the solution of linear systems.
Predictive Maintenance and Anomaly Detection
Drones generate enormous amounts of operational data, from flight logs and sensor readings to battery performance and motor diagnostics. Analyzing this data can predict potential failures, optimize maintenance schedules, and detect anomalous behavior. Many machine learning models used for predictive maintenance and anomaly detection, such as linear regression, support vector machines, or principal component analysis (PCA), fundamentally involve solving systems of linear equations or eigenvalue problems (which are closely related).
For example, PCA reduces the dimensionality of complex data by finding linear combinations of variables that capture the most variance. This involves solving an eigenvalue problem. Linear regression models predict future performance based on past data by finding the “best fit” line or hyperplane through data points, which is achieved by solving a system of normal equations derived from minimizing squared errors. These insights can extend the operational life of drones and prevent costly failures.
Resource Allocation and Swarm Intelligence
When multiple drones operate together as a swarm, tasks like coverage, target searching, or payload delivery require sophisticated coordination and resource allocation. Deciding which drone performs which task, or how to collectively optimize a mission, often involves solving optimization problems that can be formulated as linear programs or integer linear programs.
For instance, if a swarm of drones needs to survey a large area, assigning specific sub-areas to individual drones to minimize overlap and maximize efficiency can be modeled as a linear assignment problem. Solutions to such problems dictate the optimal deployment and movement of each drone in the swarm, relying on the efficient solution of large systems of linear equations to achieve intelligent collective behavior.
The Computational Backbone of Advanced AI
While deep learning models often involve non-linear activation functions, the core operations within each layer of a neural network are massive matrix multiplications. These matrix operations are essentially highly organized systems of linear equations. Training these models, especially with techniques like backpropagation, involves calculating gradients and updating weights, which can be seen as solving large, albeit iterative, systems to find optimal parameters. The hardware accelerators (GPUs, TPUs) that power modern AI are highly optimized for these linear algebra computations.
Therefore, whether it’s a drone’s AI recognizing objects, making autonomous decisions, or adapting to new environments, the speed and efficiency of these operations are directly tied to the ability to perform linear algebraic computations at an extraordinary scale and pace.
The Enduring Importance of Linear Algebra in Next-Gen Drones
The continued advancements in drone technology, pushing towards greater autonomy, intelligence, and integration into various industries, will only deepen the reliance on fundamental mathematical tools like systems of linear equations. As drones become more complex, requiring real-time processing of even larger datasets from more diverse sensors, the demand for efficient and robust algorithms built on these mathematical foundations will grow exponentially.
The Constant Evolution of Algorithms
Researchers are continuously developing more sophisticated algorithms for navigation, control, perception, and AI. While some problems might intrinsically be non-linear, the strategy often involves linearizing these problems around an operating point or iteratively solving a series of linear approximations. This means that the ability to formulate and solve linear systems remains a cornerstone skill and computational requirement. New numerical methods and hardware architectures will continue to emerge, further optimizing the speed and accuracy with which these systems can be tackled.
From Theory to Unmanned Practicality
What started as theoretical mathematics centuries ago has become the practical engine driving the autonomous vehicles of today and tomorrow. The drone, in its various forms and functions, is a powerful testament to how abstract mathematical concepts translate directly into tangible, cutting-edge technological innovation. Understanding “what is a system of linear equations” is not just about understanding a math concept; it’s about grasping one of the core enabling technologies behind the smart, flying robots that are reshaping our world. From ensuring a drone stays stable in flight to mapping a disaster zone or delivering a package autonomously, the silent, relentless processing of linear equations makes it all possible.