In the rapidly evolving landscape of unmanned aerial vehicles (UAVs), the quest for true autonomy has moved beyond simple GPS waypoints and basic obstacle avoidance. As we push the boundaries of what machines can do, engineers and computer scientists are increasingly looking toward psychology and behavioral science to refine artificial intelligence. One of the most influential frameworks currently being adapted for high-end drone technology is the Social Cognitive Approach.
Originally developed by psychologist Albert Bandura, the Social Cognitive Theory (SCT) posits that learning occurs in a social context with a dynamic and reciprocal interaction of the person, environment, and behavior. When applied to the niche of Tech and Innovation in the drone industry, this approach transforms how autonomous systems perceive their surroundings, learn from data, and interact with human operators. Instead of being programmed with rigid “if-then” logic, drones using a social cognitive framework utilize machine learning to observe, emulate, and adapt to complex variables in real-time.

The Foundations of Social Cognitive AI in Robotics
The transition from “automated” to “autonomous” requires a shift in how a drone processes information. A social cognitive approach suggests that a drone is not just a passive sensor array but an active agent capable of learning through observation and interaction.
Triadic Reciprocal Causation in Autonomous Flight
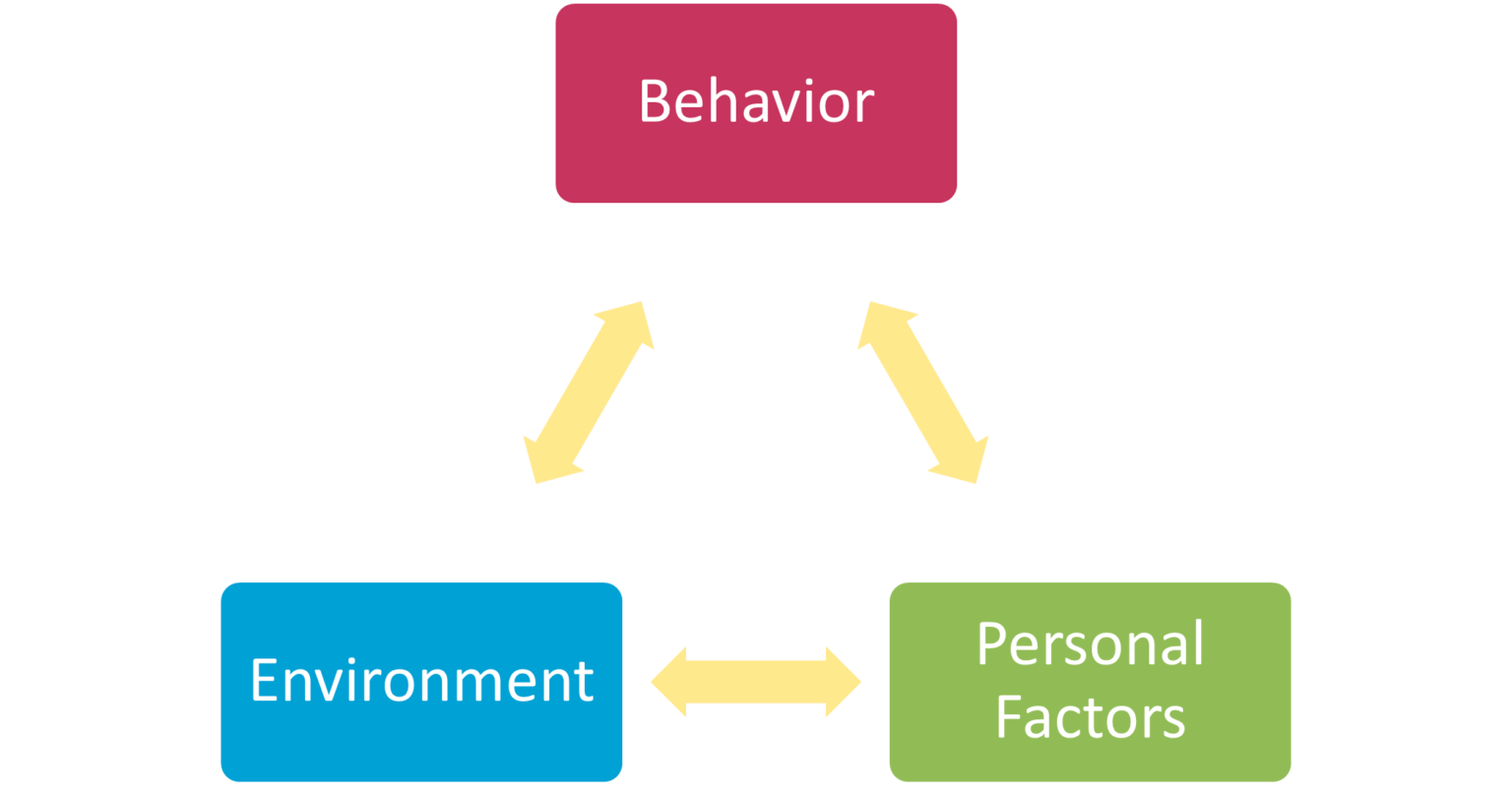
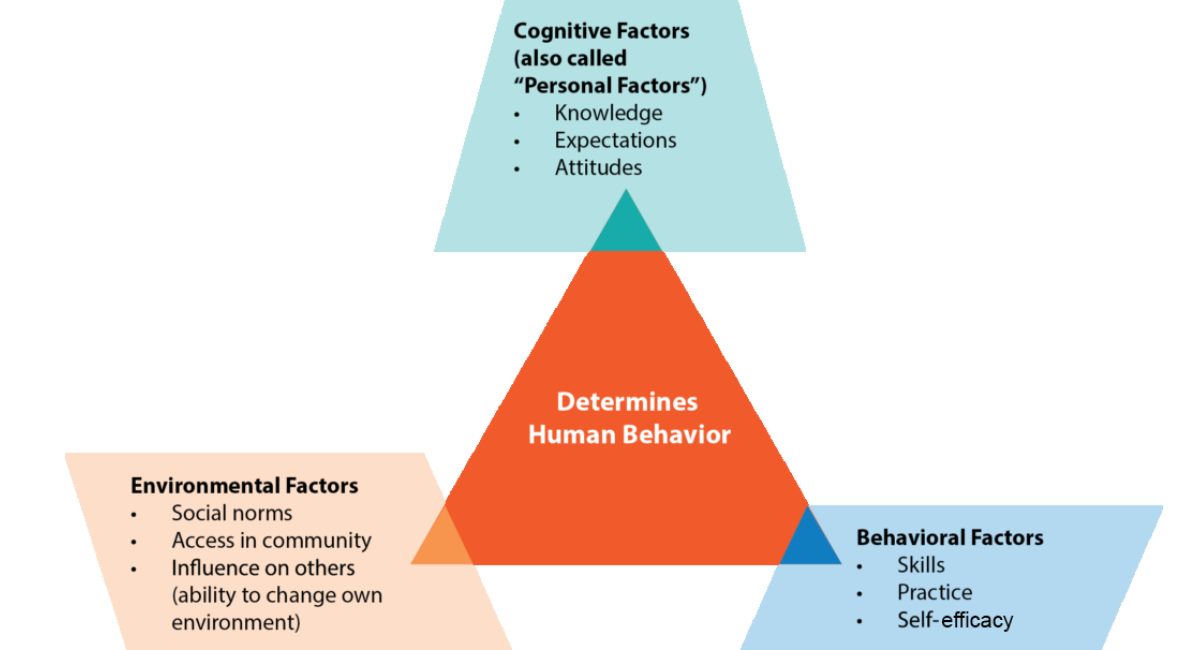
At the heart of the social cognitive approach is the concept of triadic reciprocal causation. In drone technology, this is represented by the interplay between three factors: the environment (the physical airspace and obstacles), the agent (the drone’s AI and processing power), and the behavior (the flight path and actions taken).
In traditional systems, the environment dictates the behavior. In a cognitive-based system, the drone’s internal state—its “understanding” of its own battery life, sensor health, and previous mission data—influences how it interacts with the environment. This creates a feedback loop where the drone’s experiences refine its future responses, leading to more efficient mapping and remote sensing.
The Role of Agency and Self-Regulation
For a drone to operate autonomously in a complex ecosystem, it must possess a form of “agency.” This doesn’t mean consciousness, but rather the ability to self-regulate based on goals. For instance, in autonomous mapping missions, a social cognitive-inspired AI can determine if the current lighting conditions or wind speeds are detrimental to data quality. Instead of blindly following a pre-set path, the system “decides” to hover, adjust its gimbal angle, or return to base based on its self-assessment of “efficacy”—the probability that it can successfully complete the task given current constraints.
Observational Learning Through Large Datasets
One of the hallmarks of the social cognitive approach is learning by watching others. In the world of AI, this translates to “Imitation Learning.” By processing thousands of hours of flight data recorded by professional human pilots, autonomous systems can learn the “nuances” of flight—such as how to bank smoothly around a corner or how to compensate for the “ground effect” when landing—without needing explicit code for every possible scenario.
Implementing Social Cognitive Principles in Autonomous Navigation
The application of this approach is most visible in how modern drones navigate tight spaces and unpredictable environments. By mimicking the way humans process spatial information and social cues, these drones achieve a level of fluidity that was previously impossible.
Predictive Modeling and Intent Recognition
A key component of social cognition is the ability to predict the actions of others. In Tech and Innovation, this is known as “Intent Recognition.” When a drone is in “Follow Mode” or navigating a crowded urban environment, it isn’t just tracking a moving dot. It is using cognitive-style algorithms to predict where a person or vehicle will be in three seconds.
By analyzing the trajectory and velocity of surrounding objects, the drone builds a mental model of the environment. This allows for proactive obstacle avoidance rather than reactive. If the AI “observes” a cyclist leaning into a turn, it anticipates the change in path, adjusting its own flight trajectory before the obstacle even enters its immediate safety zone.
Social Navigation and Human-Machine Interaction
As drones become more integrated into public spaces for delivery or surveillance, “Social Navigation” becomes critical. This refers to the drone’s ability to navigate in a way that is predictable and comfortable for humans. A social cognitive approach teaches the drone to respect personal space and follow “social norms” of movement. For example, instead of zipping directly over a crowd, an intelligent autonomous system might choose a peripheral path that minimizes noise disturbance and perceived threat, demonstrating an “awareness” of the social environment.
Adaptive Mapping and Remote Sensing
In the realm of remote sensing, the social cognitive approach allows for “Active Perception.” Standard drones capture data indiscriminately. However, an AI-driven drone using cognitive principles can identify areas of interest—such as a crack in a dam or a diseased patch of crops—and autonomously decide to circle back for a higher-resolution scan. It learns what “important” data looks like by comparing real-time inputs against a learned model of high-value targets.
Machine Learning and the Evolution of Drone “Intelligence”
The “Cognitive” part of the social cognitive approach relies heavily on the advancement of neural networks and edge computing. To think and act like a social agent, the drone needs massive computational power localized on the aircraft.
Neural Networks and Pattern Recognition
Modern drone innovation leverages Deep Reinforcement Learning (DRL), which is a digital mirror of Bandura’s reinforcement theories. Through millions of simulated flights, the AI is “rewarded” for stable flight and “punished” for collisions. Over time, the drone develops complex patterns of behavior that are not manually programmed but are “learned” through experience. This mimics the way cognitive development occurs in biological entities—through a process of trial, error, and refinement.
Edge AI and Real-Time Cognition
The “Social” aspect requires immediacy. A drone cannot wait for a cloud server to process whether a person is waving “hello” or “stay away.” Innovations in Edge AI—processing data directly on the drone’s onboard processor—allow for real-time social cognition. This enables features like gesture control and autonomous landing on moving platforms, where the drone must interpret the “behavior” of the landing deck and synchronize its own “behavior” perfectly.
Collaborative Swarm Intelligence
The social cognitive approach is perhaps most evident in “Swarm Technology.” When multiple drones work together to map a large area or perform a light show, they operate as a social unit. Each drone observes the position and velocity of its neighbors (observational learning) and adjusts its own behavior to maintain the integrity of the formation. This decentralized intelligence means the swarm can adapt to the loss of one unit or a sudden change in wind without human intervention, mimicking the collective behavior of birds or bees.
The Future of Innovation: Toward Socially Intelligent UAVs
As we look toward the future of drone technology, the social cognitive approach will likely move from a niche experimental framework to the industry standard for autonomous systems.
Enhancing AI Follow Mode
Currently, most “Follow Me” modes are tethered to a GPS signal or a simple visual lock. Future iterations, powered by social cognitive models, will understand context. If a mountain biker disappears behind a cluster of trees, the drone won’t simply stop; it will use “Object Permanence” (a cognitive developmental milestone) and predictive logic to fly to the spot where the biker is most likely to emerge, maintaining the shot without losing the subject.
Ethical AI and Autonomous Decision Making
As drones gain more autonomy, the social cognitive approach provides a framework for “Ethical Navigation.” By training AI on human-centric values and social behaviors, developers can create drones that prioritize safety and privacy. For instance, an autonomous drone could be programmed to recognize “privacy zones”—observing fences or windows and “learning” to avoid pointing its sensors in those directions, even if they are on the most direct flight path.
The Integration of 5G and IoT
The future of cognitive drones lies in their connectivity. Through 5G and the Internet of Things (IoT), drones will be able to share their “learned experiences” with an entire fleet. If one drone encounters a new type of obstacle or a unique environmental hazard, it can upload that “cognitive map” to the cloud, allowing all other drones in the network to “learn” from its experience without having to encounter the hazard themselves. This represents a global scale of social learning.
Conclusion
The social cognitive approach represents a paradigm shift in drone Tech and Innovation. By moving away from the “drone as a tool” mentality and toward the “drone as an intelligent agent,” we are unlocking the full potential of autonomous flight. Through the integration of triadic reciprocal causation, observational learning, and predictive modeling, modern UAVs are becoming more than just flying cameras; they are becoming sophisticated systems capable of navigating the complex nuances of the physical and social world.
As AI continues to mature, the gap between human intuition and machine logic will continue to shrink. The drones of tomorrow will not just follow our commands—they will understand our environment, predict our needs, and learn from every second they spend in the air. In this intersection of psychology and high-tech engineering, we find the blueprint for the next generation of truly autonomous aerial innovation.