Serial communication is a fundamental method of transmitting data bit by bit over a single communication line, or channel. Unlike parallel communication, which sends multiple bits simultaneously across separate lines, serial communication orchestrates a sequential flow of information. This seemingly simple approach underpins a vast array of technologies, from the simplest microcontrollers to complex industrial control systems. Its elegance lies in its efficiency for long-distance transmission and its reduced pin count requirements, making it an indispensable tool in the world of embedded systems and device interconnectivity.
In essence, serial communication is about breaking down data into a stream of individual bits and sending them one after another. Imagine a single lane highway where cars (bits) must travel in a single file. This is analogous to serial communication. Contrast this with a multi-lane highway where multiple cars can travel side-by-side, representing parallel communication. While parallel communication can offer higher speeds over short distances, its complexity, cost, and susceptibility to timing issues (skew) often make serial communication the more practical and robust choice for many applications, particularly where space and wiring are constrained.
The ubiquity of serial communication stems from its versatility and adaptability. It can be implemented in various forms, each with its own characteristics and use cases. Understanding the core principles of serial communication is crucial for anyone working with microcontrollers, sensors, embedded systems, or even in areas like drone technology where efficient data exchange is paramount. This article will delve into the fundamental concepts of serial communication, its common protocols, and its significance in modern technological landscapes.
The Fundamental Principles of Serial Communication
At its core, serial communication relies on a structured method of transferring data sequentially. This involves defining how data is framed, synchronized, and transmitted. Two primary modes of serial communication exist: synchronous and asynchronous. The choice between these two significantly impacts the complexity of the implementation and the efficiency of data transfer.
Asynchronous Serial Communication
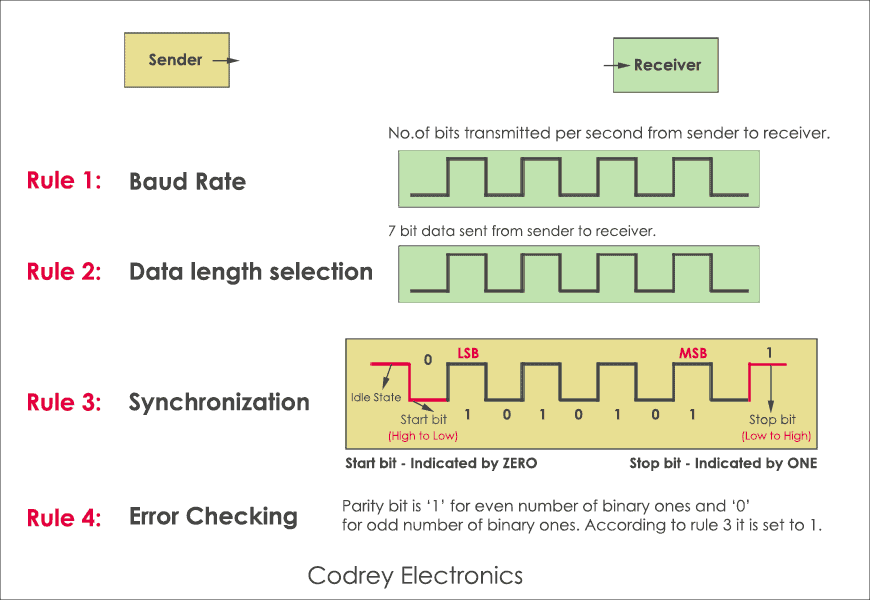
Asynchronous serial communication is characterized by its lack of a shared clock signal between the sender and receiver. Instead, it relies on pre-defined agreement on several parameters, including the data rate (baud rate), the number of data bits, the parity bit (if used), and the number of stop bits. This makes asynchronous communication simpler to implement, as it doesn’t require dedicated clock lines.
Start and Stop Bits: The Framing Mechanism
To enable the receiver to identify the beginning and end of each data unit (typically a byte), asynchronous serial communication employs start and stop bits. The line is typically held in a high state (idle state) when no data is being transmitted. When a byte of data is ready to be sent, the sender asserts a start bit, which is a transition from the high idle state to a low state. This transition signals to the receiver that data is about to arrive and initiates the receiving process.
Following the start bit, the individual data bits are transmitted, usually from the least significant bit (LSB) to the most significant bit (MSB). After all the data bits have been sent, one or more stop bits are transmitted. These are typically in the high idle state, which allows the receiver to distinguish the end of one data frame from the beginning of the next. The inclusion of stop bits ensures that the receiver has enough time to process the received data and be ready for the next start bit.
Data Bits and Parity: Ensuring Data Integrity
The actual data is transmitted in a series of bits, commonly 5, 6, 7, or 8 bits per character or byte. The exact number of data bits is part of the agreed-upon communication parameters. Beyond the data bits, an optional parity bit can be included for basic error detection. Parity checking involves calculating a bit based on the number of ‘1’s in the data bits.
- Even Parity: The parity bit is set to ‘1’ if the number of ‘1’s in the data bits is odd, and ‘0’ if it’s even. This ensures the total number of ‘1’s (including the parity bit) is always even.
- Odd Parity: The parity bit is set to ‘1’ if the number of ‘1’s is even, and ‘0’ if it’s odd. This ensures the total number of ‘1’s is always odd.
The receiver recalculates the parity and compares it with the received parity bit. If they don’t match, it indicates a potential transmission error. While useful for detecting single-bit errors, parity checking is a simple form of error detection and cannot correct errors or detect multiple-bit errors. More sophisticated error correction techniques are employed in other communication protocols.
Synchronous Serial Communication
In contrast to asynchronous communication, synchronous serial communication utilizes a shared clock signal that is transmitted alongside the data. This clock signal dictates the timing for both the sender and receiver, ensuring that data bits are sampled at precise intervals. This synchronized timing eliminates the need for start and stop bits, as the receiver knows exactly when to expect each bit of data based on the clock pulses.
The Role of the Clock Signal
The clock signal in synchronous communication acts as a metronome, keeping the sender and receiver perfectly in sync. The sender transmits a data bit and then toggles the clock line. The receiver, synchronized to this clock, samples the data line at the appropriate edge of the clock signal. This precise timing allows for higher data transfer rates compared to asynchronous communication, especially over longer distances, as it minimizes the overhead associated with start and stop bits.
Data Framing in Synchronous Systems
While start and stop bits are absent, synchronous communication still requires a mechanism for framing data, particularly for longer data blocks. This is often achieved through special synchronization characters or patterns. The sender transmits a sequence of these synchronization characters before the actual data begins. The receiver looks for this pattern to identify the start of a valid data transmission. Once the synchronization pattern is detected, the receiver knows that the subsequent bits will be data, and it uses the clock signal to read them accurately. After the data block, another synchronization pattern might be used to signal the end of the transmission.
Common Serial Communication Protocols
The principles of serial communication are implemented through various standardized protocols, each designed to meet specific needs in terms of speed, complexity, and application. These protocols define the electrical characteristics, the data framing, and the communication rules that govern the exchange of information between devices.
Universal Asynchronous Receiver/Transmitter (UART)
UART is one of the most prevalent asynchronous serial communication protocols. It’s commonly found in microcontrollers and is used for communication between devices like computers and peripherals, or between different microcontrollers. The UART hardware within a microcontroller handles the process of converting parallel data from the microcontroller’s internal bus into a serial stream of bits for transmission and vice versa for reception.

RS-232: A Classic Implementation
RS-232 is a widely recognized standard that defines the electrical characteristics and signal timing for serial communication, often using UART for data transmission. It specifies voltage levels to represent binary ‘0’ and ‘1’, as well as connector types. Historically, RS-232 was the standard for connecting modems, printers, and terminals to computers. While newer interfaces have emerged, RS-232 remains in use for industrial equipment, legacy systems, and debugging interfaces due to its robustness and simplicity.
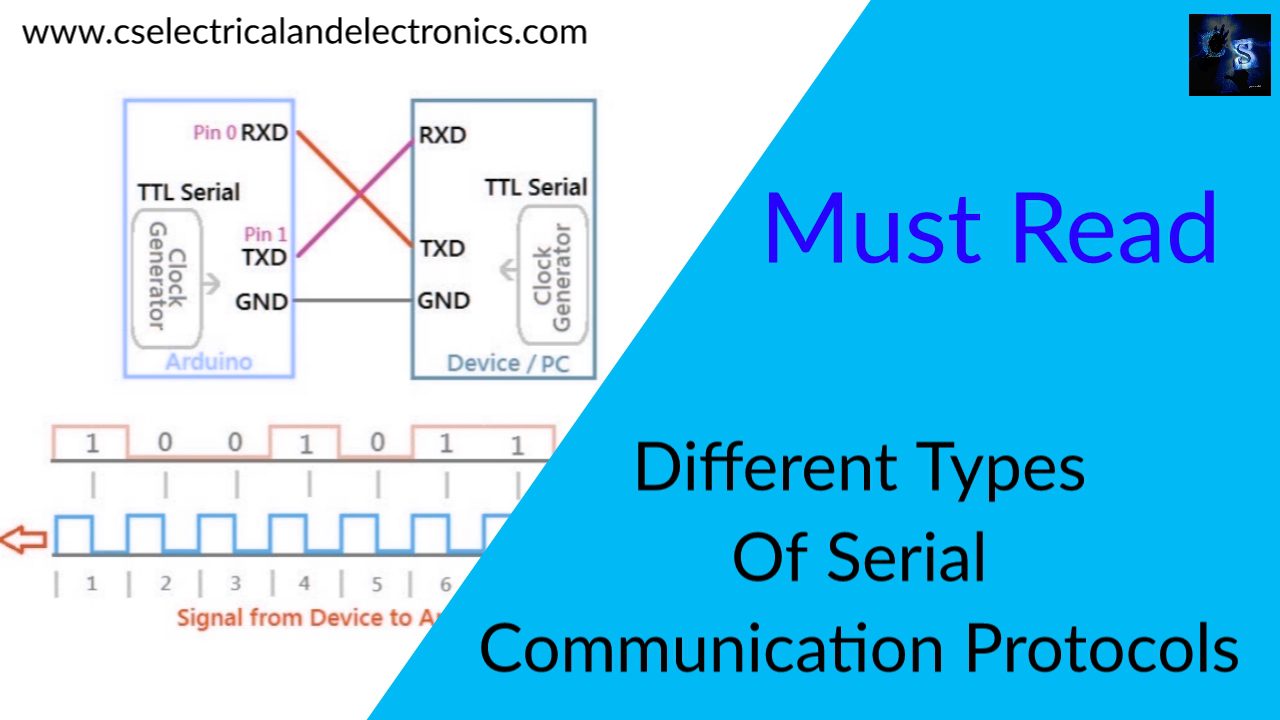
TTL vs. RS-232 Voltage Levels
It’s important to distinguish between Transistor-Transistor Logic (TTL) serial and RS-232 serial. TTL serial communication typically uses voltage levels of 0V for a logic ‘0’ (low) and 3.3V or 5V for a logic ‘1’ (high). This is directly compatible with the logic levels of most microcontrollers. RS-232, on the other hand, uses a different voltage convention. In RS-232, a negative voltage (e.g., -3V to -15V) represents a logic ‘1’ (mark), and a positive voltage (e.g., +3V to +15V) represents a logic ‘0’ (space). This difference in voltage levels necessitates the use of level-shifting ICs (like MAX232) when interfacing TTL serial devices with RS-232 ports.
Inter-Integrated Circuit (I²C)
I²C, pronounced “I-squared-C” or “I-two-C,” is a synchronous serial communication protocol developed by Philips Semiconductor (now NXP Semiconductors). It’s designed for short-distance communication between integrated circuits on the same circuit board. I²C uses only two wires: a serial data line (SDA) and a serial clock line (SCL). This makes it very efficient in terms of pin usage, which is a significant advantage in compact electronic designs.
Master-Slave Architecture and Addressing
I²C operates on a master-slave architecture. A master device initiates communication and controls the clock signal. Slave devices respond to the master’s commands. Each slave device on the I²C bus has a unique 7-bit or 10-bit address. When the master wants to communicate with a specific slave, it first sends the slave’s address on the SDA line. Only the slave device with that matching address will acknowledge the request and participate in the subsequent data transfer. This addressing scheme allows multiple slave devices to share the same two communication lines.
Multi-Master Capability and Arbitration
A notable feature of I²C is its multi-master capability. More than one master device can be connected to the same I²C bus. However, to prevent data collisions when multiple masters attempt to communicate simultaneously, I²C employs an arbitration mechanism. If two masters start transmitting at the same time, the I²C protocol ensures that only one master will gain control of the bus, while the other will back off and try again later. This arbitration process is critical for maintaining data integrity in complex systems with multiple controlling devices.
Serial Peripheral Interface (SPI)
SPI is another synchronous serial communication protocol, developed by Motorola (now Freescale Semiconductor). SPI is known for its high speed and full-duplex communication capabilities, meaning data can be transmitted and received simultaneously. It typically uses four wires:
- Serial Clock (SCLK): Generated by the master device to synchronize data transfer.
- Master Out, Slave In (MOSI): Data line from the master to the slave.
- Master In, Slave Out (MISO): Data line from the slave to the master.
- Slave Select (SS) or Chip Select (CS): An active-low signal from the master to select a specific slave device.
Full-Duplex Communication and Dedicated Slave Selects
The full-duplex nature of SPI allows for very efficient data exchange, as the master can be sending data to a slave while simultaneously receiving data from it. This is particularly advantageous in applications where continuous data streams are required, such as from sensors or displays. Each slave device on the SPI bus requires its own dedicated Slave Select line from the master. This simplifies the communication process for each slave, as it doesn’t need to contend for bus access through addressing schemes like I²C. The master simply activates the SS line of the desired slave before initiating data transfer.
Applications and Significance of Serial Communication
The principles and protocols of serial communication are fundamental to the operation of a vast array of electronic devices and systems. Its efficiency, scalability, and robustness have made it a cornerstone of modern technology, enabling seamless data exchange across diverse platforms.
Embedded Systems and Microcontrollers
Microcontrollers are at the heart of countless electronic devices, from simple appliances to complex industrial machinery. Serial communication interfaces like UART, I²C, and SPI are integral to microcontrollers, allowing them to interact with the outside world. Microcontrollers use these interfaces to receive sensor data, send commands to actuators, communicate with other microcontrollers, and interface with external memory or peripherals. The reduced pin count of serial interfaces is particularly beneficial in microcontroller-based designs, where board space and component cost are often critical considerations.
Sensor Interfacing
Modern devices are increasingly reliant on sensors to gather information about their environment. Serial communication protocols are the primary means by which these sensors communicate their readings to a central processing unit. For example, temperature sensors, accelerometers, gyroscopes, and pressure sensors often use I²C or SPI to transmit their data. The ability to connect multiple sensors to a single bus (especially with I²C) simplifies wiring and reduces the complexity of the overall system design.
Networking and Communication
Beyond within-device communication, serial interfaces play a role in connecting devices over networks. While higher-level networking protocols like Ethernet and Wi-Fi are common, underlying serial interfaces are often used for initial device configuration, debugging, or in simpler network topologies. For instance, some embedded systems might use a UART to establish a basic serial link for remote monitoring or control. Moreover, many modems and communication modules employ serial interfaces for their primary data transmission.
Legacy Systems and Debugging
Despite the advent of newer, faster interfaces, serial communication, particularly RS-232, continues to be prevalent in legacy systems and industrial automation. Its simplicity and robustness make it suitable for harsh environments. Furthermore, serial ports are invaluable for debugging embedded systems. Developers often use a UART connection to a PC to send diagnostic messages, receive debugging commands, and monitor the internal state of their firmware in real-time. This provides a critical insight into the system’s behavior during development and troubleshooting.
In conclusion, serial communication, in its various forms, is a pervasive and essential technology. Understanding its principles, protocols, and applications is fundamental for anyone involved in the design, development, or maintenance of electronic systems. Its ability to efficiently transfer data bit by bit ensures that the intricate dance of information within and between our devices continues to power innovation across countless domains.