In the rapidly evolving landscape of unmanned aerial vehicles (UAVs), the distinction between a hobbyist toy and a sophisticated industrial tool is defined almost entirely by its code. As we push the boundaries of what is possible in remote sensing, autonomous navigation, and artificial intelligence, the hardware has become a vessel for complex software ecosystems. At the heart of this technological revolution lies the Software Development Life Cycle (SDLC).
The SDLC is a structured process used by software engineering teams to design, develop, and test high-quality software. In the context of drone tech and innovation, the SDLC is the rigorous framework that ensures a drone’s “brain”—its firmware, AI algorithms, and ground control stations—is reliable, scalable, and safe. For developers working on autonomous flight modes or complex mapping software, understanding the SDLC is not just about efficiency; it is about ensuring mission success in high-stakes environments.
Understanding the SDLC Framework within Drone Technology
The Software Development Life Cycle provides a systematic sequence of stages that transition a conceptual idea into a functional, airborne reality. In the niche of drone innovation, the SDLC must bridge the gap between abstract computer science and the physical laws of aerodynamics.
The Shift from Hardware-Centric to Software-Defined Platforms
Historically, drone development was dominated by mechanical engineering—propulsion systems, frame materials, and weight distribution. However, the current era of “Tech & Innovation” has shifted the focus toward software-defined platforms. Today, a drone’s ability to avoid a power line or map a 50-acre farm autonomously is a software triumph. The SDLC acts as the blueprint for this transformation, allowing innovators to manage the extreme complexity of embedded systems that must process millions of data points per second from multiple sensors.
Why the Standard SDLC Model Matters for Mission-Critical Flight Code
In drone technology, software failure isn’t just a “crash” on a screen; it can lead to a literal crash on the ground. Whether it is a delivery drone navigating a suburban neighborhood or a mapping drone surveying a construction site, the software must be resilient. By adhering to a formal SDLC, development teams can identify potential points of failure—such as sensor fusion errors or GPS signal loss—long before the aircraft leaves the workbench. This structured approach minimizes technical debt and maximizes the safety protocols inherent in modern UAV innovation.
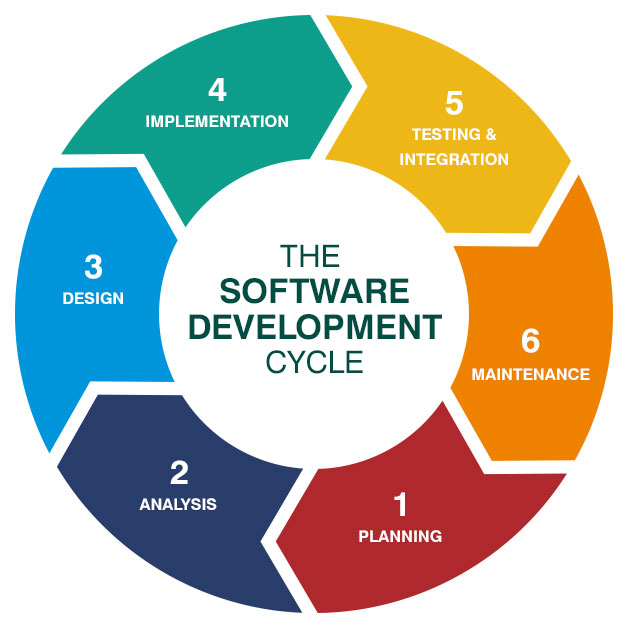
Phases of the Software Development Life Cycle for Aerial Systems
The SDLC is typically divided into several key phases. When applied to cutting-edge drone innovation, these phases take on a specialized technical character that accounts for the unique challenges of the aerial environment.
Phase 1: Requirement Analysis and Feasibility in Remote Sensing
The first step in the SDLC is defining what the software is intended to achieve. For an innovation-focused drone project, this might involve specifying the requirements for a new LiDAR mapping suite or an AI-driven crop health analysis tool. Engineers must ask: What is the required precision? What are the latency limits for the autonomous obstacle avoidance system? Feasibility studies at this stage determine if the current onboard processing power (such as NVIDIA Jetson modules or specialized SoCs) can handle the proposed algorithms.
Phase 2: Design and Architecture of Autonomous Flight Logic
Once requirements are set, the architectural design begins. This involves creating the software’s skeleton, including data flow diagrams and communication protocols between the flight controller and the companion computer. In drone tech, this stage often focuses on “Sensor Fusion Architecture”—designing how the software will weigh inputs from IMUs, barometers, and computer vision systems. A well-designed architecture ensures that the software is modular, allowing for future updates to AI models without rewriting the core flight stability code.

Phase 3: Coding and Implementation of AI Follow Algorithms
This is the “build” phase where developers write the actual code. For drone innovators, this often involves languages like C++ for real-time flight control and Python for high-level AI and machine learning tasks. During this phase, developers implement the mathematical models that allow for “Follow Me” modes or autonomous path planning. The focus is on optimization; the code must be lightweight enough to run on embedded hardware while being robust enough to handle the chaotic variables of wind, light changes, and moving obstacles.
Verification and Validation: Testing Drone Software for Safety and Precision
The testing phase of the SDLC is arguably the most critical in the drone industry. Software innovation in this space requires a multi-layered approach to validation to ensure that the “intelligence” of the drone behaves predictably.
Simulation Environments vs. Real-World Field Tests
Before a single propeller spins, modern drone software undergoes extensive “Software-in-the-Loop” (SITL) and “Hardware-in-the-Loop” (HITL) testing. Using advanced simulation environments like Gazebo or AirSim, developers can subject their algorithms to thousands of flight hours in a virtual world. This allows for the testing of “edge cases”—such as sudden motor failure or extreme weather—that would be too dangerous or expensive to test in real life. Once the software passes these digital gauntlets, it moves to controlled field testing to validate the simulation’s accuracy against real-world physics.
Managing Updates and Iterative Maintenance in Firmware
The SDLC does not end when the software is deployed. In the realm of tech innovation, continuous maintenance is vital. Over-the-air (OTA) firmware updates are the standard for modern drones, allowing companies to push security patches or improve AI recognition capabilities post-purchase. This phase involves monitoring the software’s performance in the field, collecting telemetry data, and identifying bugs that only emerge in specific environmental conditions. This feedback loop informs the next cycle of development, ensuring the technology remains at the cutting edge.
Modern SDLC Methodologies: Agile vs. Waterfall in the Drone Industry
How a team moves through the SDLC phases depends on the chosen methodology. The choice between traditional and modern approaches can significantly impact the speed of innovation.
Implementing DevOps for Rapid Aerial Software Deployment
In the fast-paced world of drone startups, many are adopting DevOps—a methodology that combines development and operations to shorten the SDLC. For drone tech, this means “Continuous Integration and Continuous Deployment” (CI/CD) pipelines. Every time a developer commits a piece of code for a new autonomous flight mode, it is automatically built, tested in a simulator, and prepared for deployment. This allows for rapid iteration, enabling tech companies to respond to new regulatory requirements or hardware breakthroughs in weeks rather than months.
Scaling AI Capabilities through Continuous Integration (CI/CD)
As drones become more reliant on AI and machine learning for tasks like object recognition and 3D reconstruction, the SDLC must adapt to “Data-Driven Development.” This involves a sub-cycle where the software is constantly trained on new datasets gathered from the fleet. By integrating this into the SDLC, drone innovators can ensure that their autonomous systems are getting smarter with every flight, refining their ability to distinguish between a person and a tree, or a healthy crop and a diseased one.

The Future of SDLC in Autonomous Ecosystems
As we look toward the future of drone technology, the Software Development Life Cycle will become even more integrated with secondary innovations like 5G connectivity and Edge Computing. The SDLC for a drone “swarm,” for instance, requires a level of complexity in the design and testing phases that was unimaginable a decade ago. It involves not just the flight of one aircraft, but the orchestrated communication of hundreds.
The SDLC is the invisible engine driving drone innovation. By providing a structured path from requirement gathering to maintenance, it allows engineers to manage the inherent risks of flight while pushing the boundaries of what autonomous machines can achieve. Whether it is refining a search-and-rescue algorithm or perfecting a remote sensing application, the disciplined application of the Software Development Life Cycle ensures that the future of flight is not only innovative but also safe, reliable, and intelligent.