The world of drones is rapidly evolving, moving beyond simple aerial photography to embrace sophisticated autonomous systems, advanced remote sensing, and seamless integration with broader technological ecosystems. At the heart of this evolution lies the critical need for robust, flexible, and intelligent connectivity. While off-the-shelf drone solutions offer convenience, the true innovation and customization often stem from leveraging powerful, programmable hardware. This is where the Raspberry Pi, a versatile credit-card-sized computer, enters the picture. When we talk about “Raspberry Pi Connect” in the context of drones, we are referring to the innovative ways a Raspberry Pi can be integrated to facilitate communication, data processing, and control for unmanned aerial vehicles (UAVs). It’s not a single, predefined product, but rather a conceptual framework and a set of practical implementations that unlock new levels of drone capability.

Understanding the Foundation: The Raspberry Pi and Drone Integration
The Raspberry Pi has revolutionized accessible computing, making powerful processing and programming capabilities available to hobbyists, educators, and professionals alike. Its appeal to the drone community lies in its small form factor, low power consumption, extensive I/O capabilities, and vast software support. Integrating a Raspberry Pi into a drone platform transforms it from a remote-controlled device into a sophisticated flying computer. This allows for on-board intelligence, custom sensor integration, and advanced communication protocols that go far beyond the standard radio control systems.
The Raspberry Pi as a Drone’s Brain
At its core, the Raspberry Pi can function as the central processing unit for a drone. This means it can handle tasks that are too complex for the flight controller alone. While flight controllers are optimized for real-time stabilization and navigation, a Raspberry Pi can manage higher-level operations such as:
- Computer Vision and AI: Running algorithms for object detection, recognition, tracking, and even AI-driven flight modes like “follow me” or autonomous navigation through complex environments. This is crucial for applications in delivery, surveillance, and inspection.
- Data Logging and Processing: Collecting data from various sensors (LiDAR, thermal cameras, environmental sensors) and processing it in real-time or storing it for post-flight analysis. This enables sophisticated mapping, surveying, and scientific research missions.
- Custom Control Interfaces: Developing unique control interfaces beyond traditional joysticks, such as gesture control, voice commands, or integration with augmented reality (AR) systems.
- Network Connectivity: Enabling advanced networking capabilities for streaming high-definition video, telemetry data, or even controlling multiple drones simultaneously through complex command-and-control networks.
Leveraging Raspberry Pi’s I/O for Drone Systems
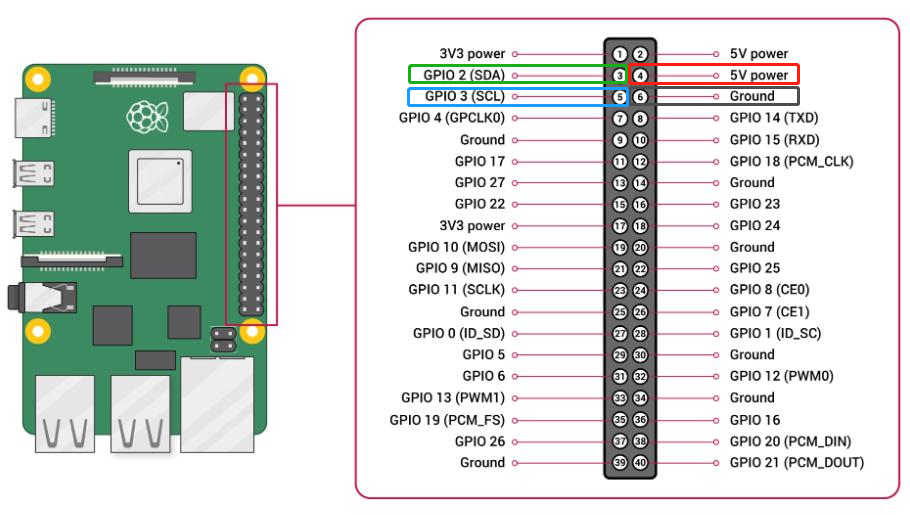
The General Purpose Input/Output (GPIO) pins on a Raspberry Pi are a key enabler of its connectivity prowess. These pins allow the Raspberry Pi to interface directly with a wide range of electronic components essential for drone operation.
- Sensor Integration: The GPIO pins can be used to connect various sensors, including GPS modules for precise location tracking, Inertial Measurement Units (IMUs) for attitude and acceleration data (though often handled by the flight controller, the Pi can augment or read this data), ultrasonic or infrared sensors for proximity detection and obstacle avoidance, and specialized sensors for environmental monitoring or payload operation.
- Actuator Control: While the flight controller manages motor PWM signals, the Raspberry Pi can control other actuators such as servos for camera gimbals, mechanisms for deploying payloads, or even the operation of specialized lighting or communication equipment.
- Communication Modules: The Pi can host and manage various communication modules, including Wi-Fi, Bluetooth, and even cellular modems (via USB or HATs), allowing for diverse connectivity options.
Architectures of Raspberry Pi Connect for Drones
The term “Raspberry Pi Connect” encompasses various architectural approaches to integrating the Pi into a drone system. These architectures dictate how the Raspberry Pi interacts with the flight controller, sensors, and ground station, each offering distinct advantages for different applications.
Onboard Companion Computer Architecture
This is the most common and versatile approach. In this setup, the Raspberry Pi acts as an “onboard companion computer” to the primary flight controller (e.g., Pixhawk, ArduPilot).
- Flight Controller as the Core: The flight controller remains responsible for the critical, real-time tasks of flight stabilization, basic navigation, and safety protocols.
- Raspberry Pi for Higher-Level Tasks: The Raspberry Pi connects to the flight controller, typically via a serial (UART) connection, and handles more computationally intensive or complex tasks. This allows for a division of labor, with each component optimized for its role.
- Mavlink Protocol: A common communication protocol used between the flight controller and the Raspberry Pi is MAVLink (Micro Air Vehicle Link). This standardized messaging protocol enables the exchange of telemetry data, commands, and sensor information.
- Examples of Use Cases:
- Autonomous Navigation: The Pi can process camera feeds or GPS waypoints to plan complex flight paths and send them to the flight controller for execution.
- Advanced Payload Control: Controlling a robotic arm, deploying a parachute, or operating a specialized camera based on AI-driven decisions.
- Real-time Data Analysis: Analyzing sensor data for anomalies or identifying specific objects in the environment.
Standalone Raspberry Pi Flight Control (Experimental)
While less common for general-purpose drones due to the stringent real-time requirements of flight control, there are experimental projects and specialized applications where a Raspberry Pi, often paired with additional hardware like real-time co-processors or specialized motor controllers, can manage flight control directly.
- Direct Motor Control: The Pi would directly send PWM signals to electronic speed controllers (ESCs) for motor propulsion.
- Sensor Fusion and Stabilization: The Pi would be responsible for reading data from IMUs and other sensors, performing sensor fusion, and calculating stabilization commands.
- Challenges: Achieving the low latency and determinism required for stable flight control can be challenging on a general-purpose operating system like Raspberry Pi OS. Real-time operating system (RTOS) patches or dedicated co-processors are often needed.
- Use Cases: Primarily found in research and development, or for custom-built drones where unique control algorithms or custom hardware integration is paramount.
Hybrid Architectures
More complex drone systems might employ hybrid architectures, combining elements of both. For instance, a drone might have a primary flight controller for stability, a separate Raspberry Pi for vision processing, and yet another microcontroller (potentially another Raspberry Pi or an Arduino) for managing a specific payload or sensor array. This modularity allows for extreme customization and scalability.
Enabling Advanced Capabilities Through Raspberry Pi Connect
The true power of integrating a Raspberry Pi into a drone lies in the advanced capabilities it unlocks. These capabilities are transforming how drones are used across various industries and applications.
Enhanced Situational Awareness and Autonomy
- Computer Vision for Object Detection and Tracking: With libraries like OpenCV and frameworks like TensorFlow or PyTorch, a Raspberry Pi can analyze video streams from onboard cameras to detect and track specific objects. This is fundamental for autonomous delivery drones, agricultural drones identifying pests, or inspection drones pinpointing defects.
- Obstacle Avoidance: By processing data from ultrasonic, infrared, or even stereo vision sensors, the Raspberry Pi can compute avoidance maneuvers and send commands to the flight controller to steer clear of obstacles, significantly improving safety and enabling operation in complex environments.
- Simultaneous Localization and Mapping (SLAM): For advanced navigation and mapping tasks, the Raspberry Pi can run SLAM algorithms, allowing the drone to build a map of its environment while simultaneously tracking its own position within that map. This is invaluable for indoor navigation or operations in GPS-denied areas.
Sophisticated Data Acquisition and Processing
- Multi-Sensor Data Fusion: Drones can be equipped with a multitude of sensors (thermal, multispectral, LiDAR, gas sensors). The Raspberry Pi can collect data from all these sensors, synchronize it, and perform fusion to derive more meaningful insights than individual sensors could provide.
- Edge Computing: Instead of transmitting raw sensor data back to a ground station for processing, the Raspberry Pi can perform significant data processing onboard. This reduces bandwidth requirements, improves latency for real-time decision-making, and is crucial for applications operating in remote areas with limited connectivity.
- Custom Data Logging: For scientific research or industrial monitoring, the Raspberry Pi can be programmed to log specific sensor data with precise timestamps, store it efficiently, and even perform initial data quality checks.
Advanced Communication and Ground Control
- Custom Telemetry and Command Links: Beyond standard MAVLink, the Raspberry Pi can implement custom communication protocols for specialized applications, such as encrypted communication, high-bandwidth video streaming, or direct control of drone swarms.
- Integration with Cloud Platforms: The Raspberry Pi can act as a bridge, sending processed data and telemetry to cloud platforms for further analysis, storage, and visualization. This enables centralized monitoring and management of fleets of drones.
- Companion App Development: Developers can create sophisticated ground control applications that leverage the Raspberry Pi’s capabilities. This could include advanced mission planning interfaces, real-time data visualization dashboards, or interactive control systems.
Implementing Raspberry Pi Connect: Hardware and Software Considerations
Successfully implementing “Raspberry Pi Connect” requires careful consideration of both hardware and software components. The choice of components will depend on the specific application, budget, and desired level of performance.
Hardware Components
- Raspberry Pi Model: The choice of Raspberry Pi model (e.g., Raspberry Pi 4 Model B, Raspberry Pi Zero 2 W, Raspberry Pi Compute Module) will depend on the processing power, memory, and I/O requirements of the application. For intensive tasks like real-time AI, a more powerful model is necessary, while for simpler sensor interfacing, a Pi Zero might suffice.
- Flight Controller: A compatible flight controller (e.g., Pixhawk, CubePilot) is typically required to manage the core flight dynamics and safety features.
- Power Management: Providing stable and sufficient power to both the flight controller and the Raspberry Pi is crucial. This often involves specialized power distribution boards or voltage regulators.
- Communication Interfaces: Depending on the chosen architecture, this might include UART-to-USB converters, Ethernet connections, or specialized radio modules.
- Sensors and Peripherals: This can range from standard GPS modules and cameras to more specialized sensors like LiDAR scanners, thermal cameras, or environmental sensors.
- Enclosure and Mounting: A robust and lightweight enclosure is needed to protect the Raspberry Pi and its components from the elements and vibrations encountered during flight.
Software and Operating Systems
- Raspberry Pi OS (formerly Raspbian): The standard operating system for the Raspberry Pi provides a familiar Linux environment for development and deployment.
- Libraries and Frameworks: Extensive use of libraries like OpenCV for computer vision, NumPy for numerical operations, and specialized SDKs for particular sensors or communication protocols.
- MAVLink Libraries: For communication with flight controllers, libraries like
pymavlink(Python) are essential. - Custom Applications: Developers will often write custom scripts and applications to integrate the Raspberry Pi’s functionalities with the drone’s overall mission.
- Real-Time Considerations: For applications demanding strict real-time performance, exploring RTOS options or utilizing the Raspberry Pi alongside a dedicated real-time co-processor might be necessary.
In conclusion, “Raspberry Pi Connect” is not a singular product but a powerful paradigm for enhancing drone capabilities. By integrating the versatile computing power of a Raspberry Pi, users can move beyond basic flight and unlock advanced autonomy, sophisticated data processing, and unprecedented levels of customization. Whether for research, industrial applications, or the development of next-generation UAVs, the Raspberry Pi offers a flexible and accessible gateway to a smarter, more capable future for drone technology.