In an era increasingly defined by automation, artificial intelligence, and immersive digital experiences, the precision with which we understand and manipulate three-dimensional space is paramount. From the fluid movements of an autonomous drone to the seamless immersion of a virtual reality world, the underlying mathematical framework that enables such sophistication is often unseen yet incredibly powerful. Among these foundational tools, quaternions stand out as an indispensable concept, a numerical system that extends complex numbers and offers an elegant, robust solution for representing rotations in 3D space.
Far from being an abstract mathematical curiosity, quaternions are the unsung heroes powering a vast array of modern technological innovations. They provide a superior alternative to traditional methods like Euler angles and rotation matrices, overcoming critical limitations that plague real-time systems and complex simulations. Understanding what quaternions are, why they are so effective, and where they are applied is crucial for anyone looking to delve deeper into the mechanics of contemporary tech. This article will demystify quaternions, exploring their mathematical foundation, highlighting their advantages, and showcasing their profound impact across autonomous flight, robotics, computer graphics, and beyond—all critical facets of the burgeoning landscape of tech and innovation.
Beyond Euler Angles: Why Quaternions Are Superior for 3D Rotations
The concept of rotation is fundamental to understanding movement in 3D space. For decades, engineers and developers relied on methods like Euler angles or rotation matrices. While effective for certain applications, these traditional approaches come with inherent limitations that significantly impede performance and reliability in dynamic, real-time environments. Quaternions emerged as a groundbreaking solution, offering unparalleled robustness and efficiency.
The Problem with Gimbal Lock and Euler Angles
Euler angles, typically represented by three consecutive rotations around orthogonal axes (e.g., yaw, pitch, and roll), are intuitively appealing. They are easy for humans to understand and visualize, often corresponding to how we naturally describe an object’s orientation. However, their simplicity belies a critical flaw: gimbal lock. Gimbal lock occurs when two of the three rotation axes align, effectively reducing the system’s degrees of freedom from three to two. When this happens, a drone might lose its ability to pitch or roll, or a camera system might lose its ability to track smoothly. This phenomenon leads to erratic behavior, loss of control, and computational instability, making Euler angles unsuitable for precise, continuous rotation tracking required by advanced robotics, autonomous systems, and flight controllers. The mathematical singularity at the point of gimbal lock can cause division by zero errors or unpredictable results in calculations.
Quaternions: A More Robust Representation
Quaternions address the problem of gimbal lock head-on by providing a four-component representation of rotation. Unlike Euler angles, which describe rotations sequentially, a quaternion represents a single rotation about an arbitrary axis in 3D space. This continuous and unambiguous representation means that quaternions inherently avoid gimbal lock. They describe orientation smoothly across all possible rotations, eliminating the singularities that plague Euler angles. This robustness is vital for systems like drone stabilization, where a sudden loss of rotational freedom could lead to a crash, or in VR/AR where a glitch in head tracking could cause severe motion sickness. Their ability to handle all orientations without ambiguity makes them the go-to choice for mission-critical applications where stability and precision are paramount.
Mathematical Elegance and Efficiency
Beyond solving gimbal lock, quaternions also offer significant computational advantages. While rotation matrices are equally robust (they also avoid gimbal lock), they involve a 3×3 matrix multiplication, which requires 9 numbers and 27 multiplications and 18 additions for composing rotations. Quaternions, consisting of four numbers, require fewer operations for composing rotations (16 multiplications and 12 additions) and for rotating vectors. This efficiency is critical in real-time systems where every millisecond counts, such as in flight controllers, game engines, and robotic control systems. Their more compact representation also means less memory usage. Furthermore, operations like interpolation between two orientations (known as Slerp – Spherical Linear Interpolation) are mathematically elegant and computationally straightforward with quaternions, producing smooth, natural-looking transitions, a necessity for animation and trajectory planning in modern tech.
The Anatomy of a Quaternion: Understanding the Basics
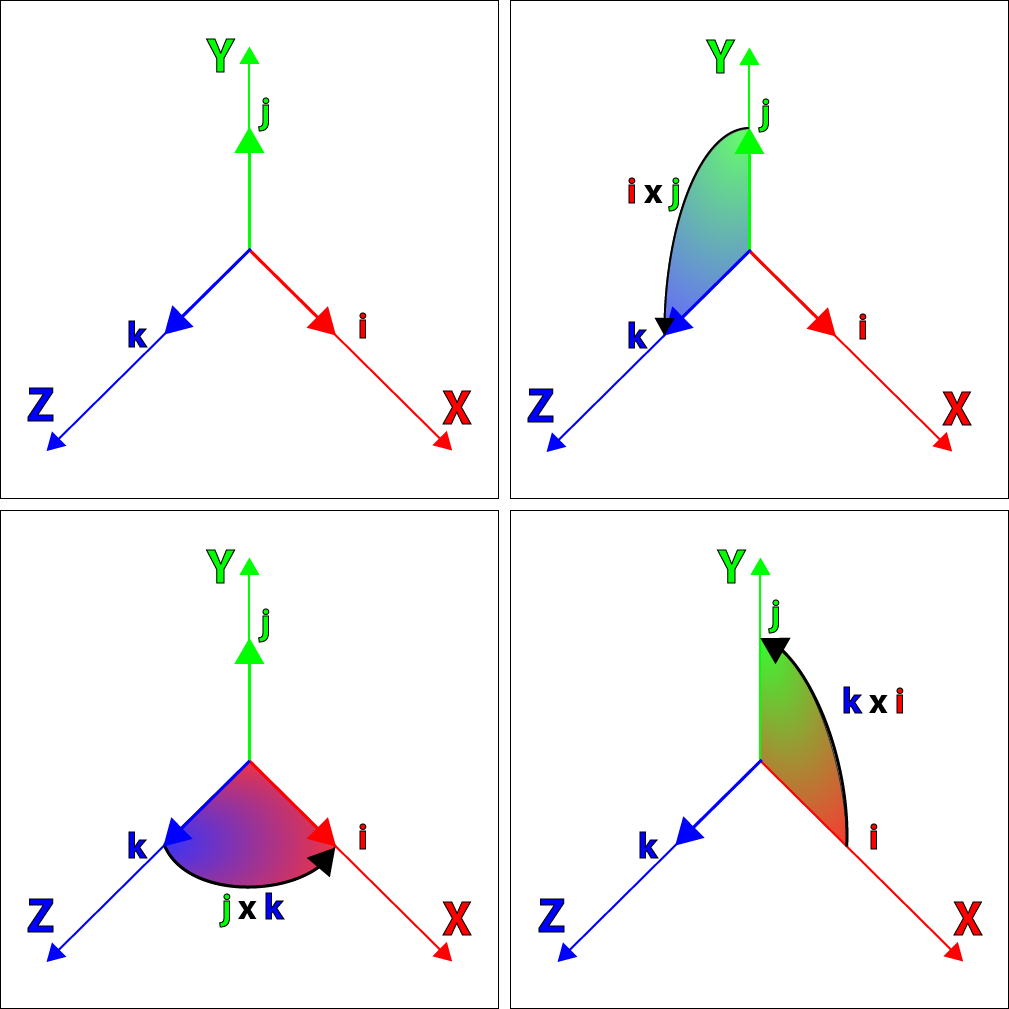
To truly appreciate the power of quaternions, it’s essential to grasp their fundamental mathematical structure. Invented by William Rowan Hamilton in 1843, quaternions extend the concept of complex numbers, which use an imaginary unit i where i² = -1, by introducing two more imaginary units, j and k, that also satisfy j² = k² = ijk = -1. This extension provides the framework necessary to describe 3D rotations in a coherent and compact manner.
Real and Imaginary Components
A quaternion q is typically expressed in the form q = w + xi + yj + zk, where w, x, y, and z are real numbers.
- The
wcomponent is known as the scalar or real part. - The
xi + yj + zkpart is the vector or imaginary part, often denoted asv.
So, a quaternion can be thought of as a pair:(w, v), wherewis a scalar andvis a 3D vector. This structure is key to how quaternions represent rotations. Thei,j, andkcomponents behave according to specific multiplication rules (e.g.,ij = k,jk = i,ki = j, butji = -k,kj = -i,ik = -j), which define their non-commutative algebra.
Representing Rotations: Unit Quaternions
For representing rotations, a special type of quaternion called a unit quaternion (or versor) is used. A unit quaternion has a magnitude (or norm) of 1, meaning that √(w² + x² + y² + z²) = 1. This property is crucial because it ensures that rotations do not scale or deform the objects they rotate, only change their orientation.
A unit quaternion q = w + xi + yj + zk representing a rotation of an angle θ around an arbitrary axis (ax, ay, az) can be constructed as follows:
w = cos(θ/2)x = ax * sin(θ/2)y = ay * sin(θ/2)z = az * sin(θ/2)
Here, the vector(ax, ay, az)must be a unit vector (normalized). This elegant formulation directly encodes the axis and angle of rotation into a single quaternion, making it both intuitive and mathematically sound for 3D manipulation.
Quaternion Algebra: Multiplication and Conjugation
The power of quaternions for representing rotations comes from their unique algebra.
- Quaternion Multiplication: Unlike regular number multiplication, quaternion multiplication is non-commutative (i.e.,
q1 * q2 ≠ q2 * q1). This property is essential for chaining rotations, where the order of operations matters. If you want to apply rotationq1and then rotationq2, you multiplyq2 * q1. This operation effectively composes two rotations into a single new quaternion, streamlining complex rotational sequences. - Quaternion Conjugation: The conjugate of a quaternion
q = w + xi + yj + zkisq* = w - xi - yj - zk. The conjugate represents the inverse rotation. Multiplying a quaternion by its conjugate results in a scalar (magnitude squared), and for unit quaternions,q * q* = 1. This property makes it straightforward to undo rotations or find the opposite orientation. - Rotating a Vector: To rotate a 3D vector
vusing a quaternionq, you treat the vectorvas a “pure” quaternion (withw=0, sov = 0 + xi + yj + zk). The rotated vectorv'is then calculated asv' = q * v * q*. This elegant formula performs the rotation efficiently and robustly.
The blend of their scalar and vector parts, combined with specific multiplication and conjugation rules, makes quaternions an incredibly powerful and versatile tool for managing 3D orientations, forming the bedrock for many advanced technological applications.
Quaternions in Action: Driving Innovation Across Tech Domains
The unique properties of quaternions—their robustness, efficiency, and lack of gimbal lock—have made them indispensable across a wide spectrum of modern technological fields. They are not merely an academic concept but a fundamental enabling technology for autonomous systems, immersive experiences, and sophisticated control mechanisms.
Autonomous Flight and Drone Navigation
One of the most prominent applications of quaternions is in the realm of autonomous flight and drone navigation. Drones, particularly quadcopters, rely heavily on precise orientation control to maintain stability, execute complex maneuvers, and resist external disturbances like wind.
- Flight Controllers: Quaternions are used within drone flight controllers to represent the aircraft’s attitude (pitch, roll, yaw). Sensor data from IMUs (Inertial Measurement Units) – gyroscopes and accelerometers – is often processed to estimate the drone’s current orientation, which is then typically converted into a quaternion.
- Stabilization Systems: Control algorithms use these quaternion-based orientations to calculate corrective thrusts for the motors, ensuring stable flight. The smooth interpolation capabilities of quaternions allow for fluid transitions between target orientations, crucial for cinematic drone footage or precise cargo delivery.
- Navigation and Path Planning: For autonomous flight, quaternions are used to define desired orientations along a flight path. When a drone needs to follow a complex trajectory or track a moving target, quaternions ensure that the drone can smoothly transition through various attitudes without encountering computational singularities or jitter. This is vital for advanced features like “follow-me” modes, waypoint navigation, and autonomous surveying.
Robotics and Kinematics
In robotics, particularly for multi-jointed robot arms, humanoids, and mobile robots, precise control over orientation and movement is critical. Quaternions play a key role in both forward and inverse kinematics, allowing robots to perform intricate tasks with high accuracy.
- Robot Arm Control: For robotic manipulators, quaternions can represent the orientation of each joint or end-effector. This prevents gimbal lock in complex sequences of motion, ensuring smooth and predictable movement of the robot arm. When a robot needs to grasp an object, the orientation of its gripper must be precisely controlled, and quaternions provide the mathematical stability for this.
- Humanoid Robotics and Gait Planning: In humanoid robots, maintaining balance and executing natural gaits requires constant orientation adjustments. Quaternions are used in the control algorithms to manage the robot’s center of mass and overall body orientation, preventing falls and enabling dynamic locomotion.
- Mobile Robot Navigation: For ground-based autonomous vehicles and rovers, quaternions contribute to accurate pose estimation and tracking, allowing them to navigate complex terrains and environments with greater reliability.
Virtual Reality, Augmented Reality, and Computer Graphics
The immersive experiences offered by VR/AR and the realism of modern computer graphics owe much to the efficient and accurate handling of 3D rotations provided by quaternions.
- Head Tracking and Motion Control: In VR headsets, quaternions are used to track the user’s head movements. The orientation data from IMUs in the headset is converted into quaternions, which then precisely control the virtual camera’s perspective. This ensures a seamless and natural viewing experience, minimizing latency and preventing motion sickness.
- Object Manipulation and Animation: In 3D modeling and animation software, artists and developers use quaternions to define rotations for objects, characters, and cameras. Their smooth interpolation (Slerp) is perfect for creating fluid, realistic animations without sudden jumps or unnatural twists.
- Game Engines: Modern game engines like Unity and Unreal Engine extensively use quaternions for managing object orientations, camera controls, character animations, and physics simulations. This allows for rich, dynamic virtual worlds where objects move and interact realistically.
- Augmented Reality (AR): For AR applications, accurately overlaying virtual objects onto the real world requires precise tracking of the device’s (e.g., smartphone, AR glasses) orientation. Quaternions ensure that virtual content remains stable and correctly aligned with the real environment as the user moves.
AI, Machine Learning, and Sensor Fusion
As AI and machine learning increasingly interact with the physical world, accurate spatial reasoning becomes paramount. Quaternions support these advancements, particularly in areas like sensor fusion and pose estimation.
- Sensor Fusion: Autonomous systems integrate data from various sensors (IMUs, GPS, LiDAR, cameras) to build a comprehensive understanding of their environment and their own state (position and orientation). Algorithms like Kalman filters or Extended Kalman Filters often use quaternions to represent orientation data from gyroscopes and accelerometers, providing a stable and accurate input for fusion processes.
- Pose Estimation: In fields like robotics, computer vision, and autonomous driving, determining the “pose” (position and orientation) of an object or an agent is a fundamental task. Quaternions are used to represent the rotational component of the pose, feeding into machine learning models that interpret sensor data to track objects, recognize gestures, or understand environmental context.
- Reinforcement Learning for Robotics: Training AI agents to control robots or autonomous vehicles involves teaching them to perform actions that result in desired poses and movements. Quaternions provide a robust representation for the agent’s current state and target orientations, simplifying the learning task and improving stability during training and execution.
Implementing Quaternions: From Theory to Practical Application
While the mathematical underpinnings of quaternions can appear daunting, their practical implementation in modern software development is made accessible through well-established tools and libraries. Moving from theoretical understanding to effective application involves leveraging these resources and being aware of common challenges and best practices.
Software Libraries and Development Frameworks
The widespread utility of quaternions has led to their integration into virtually every major mathematical, graphics, and robotics library. Developers rarely need to implement quaternion algebra from scratch, instead relying on robust, optimized implementations provided by these frameworks:
- Game Engines: Unity3D and Unreal Engine (C++) have built-in
Quaterniontypes and functions (e.g.,Quaternion.Lerp,Quaternion.Slerp,Quaternion.LookRotationin Unity,FQuatin Unreal) that handle all the complex mathematics. - Linear Algebra Libraries: Libraries like Eigen (C++), NumPy (Python) for scientific computing, or GLM (OpenGL Mathematics for C++) provide comprehensive quaternion support, allowing for efficient operations on vector and matrix types.
- Robotics Frameworks: ROS (Robot Operating System) uses quaternions as the standard representation for orientations in messages (e.g.,
geometry_msgs/Quaternion) and in its transformation library (TF). This standardization ensures seamless interoperability between different robotic components and algorithms. - Physics Engines: Most physics engines, whether for games or simulations, use quaternions internally for rigid body dynamics to ensure stable and accurate rotational motion.
These libraries abstract away the complex mathematical operations, allowing developers to focus on the application logic while benefiting from the inherent advantages of quaternions.
Computational Advantages in Real-time Systems
The choice of quaternions over other rotation representations is not just about avoiding gimbal lock; it’s also about computational performance, especially critical for real-time systems.
- Reduced Operations: As discussed, composing rotations with quaternions involves fewer multiplications and additions compared to rotation matrices. This translates directly to faster execution times per frame in a game, quicker control loop cycles in a drone, or more responsive feedback in a VR application.
- Memory Efficiency: A quaternion uses four floating-point numbers, compared to nine for a 3×3 rotation matrix. While this difference might seem minor for a single object, in systems with hundreds or thousands of rotating entities (e.g., particles, complex environments, or multi-robot simulations), the cumulative memory savings and reduced bandwidth can be substantial.
- Optimized Interpolation: Smooth interpolation between orientations is crucial for visually appealing animations and stable motion planning. Spherical Linear Interpolation (Slerp) with quaternions is computationally efficient and naturally produces the shortest path between two orientations on a sphere, preventing unwanted twists or flips that can occur with linear interpolation of Euler angles.
These advantages collectively make quaternions the preferred choice for applications demanding high performance and graphical fidelity.
Challenges and Best Practices
While quaternions offer significant benefits, there are some aspects developers need to be mindful of:
- Intuition Gap: Quaternions are less intuitive to grasp than Euler angles. A developer cannot simply “tweak” a quaternion’s
x,y,z, orwcomponent to get a desired visual effect directly. Conversion functions (e.g., quaternion to Euler angles for display, or Euler angles to quaternion for input) are often used to bridge this gap during development. - Normalization: It’s crucial to ensure that quaternions remain normalized (have a magnitude of 1), especially after multiple operations or floating-point precision errors accumulate. Regular re-normalization prevents “drift” in rotation and maintains the integrity of the rotation representation. Many libraries automatically handle this, but it’s a concept to be aware of.
- Double Cover: Every rotation can be represented by two unit quaternions (q and -q). These are mathematically equivalent but point in opposite directions in quaternion space. While usually not a problem, it can sometimes lead to issues if interpolation algorithms unexpectedly switch between these representations, causing a “flip.” Careful handling and ensuring consistent signs (e.g., always positive
wfor shortest path) can mitigate this.

By understanding these nuances and leveraging the powerful tools available, developers can effectively harness the capabilities of quaternions to build robust, efficient, and innovative technological solutions.
Conclusion
Quaternions, born from a flash of insight on Dublin’s Brougham Bridge, have evolved from a mathematical curiosity into an indispensable tool powering the vanguard of modern technological innovation. Their ability to elegantly and robustly represent 3D rotations, free from the pitfalls of gimbal lock and with superior computational efficiency, has cemented their status as the mathematical backbone for an astonishing array of advanced systems.
From the precise maneuvers of autonomous drones navigating complex airspace to the fluid interactions within immersive virtual reality environments, and from the dexterous movements of advanced robotic manipulators to the sophisticated sensor fusion algorithms driving AI, quaternions are silently at work. They enable the stability, accuracy, and performance that users now expect from cutting-edge technology. As we push the boundaries of automation, realism, and intelligent systems, the demand for precise spatial understanding will only grow. Quaternions stand ready, a testament to the enduring power of fundamental mathematics to unlock the next generation of human ingenuity and technological advancement within the ever-evolving landscape of Tech & Innovation.