In the rapidly evolving landscape of unmanned systems, the distinction between aerial drones and maritime vessels is blurring. When we examine the question of what is needed for steering control on a personal watercraft (PWC)—whether it is a remote-controlled hobbyist vessel, a professional Unmanned Surface Vessel (USV), or an autonomous jet-propelled unit—we move into the sophisticated realm of Flight Technology.
While “flight” might seem a misnomer for a vessel bound to the water’s surface, the stabilization systems, GPS navigation, and sensor arrays required to steer a modern watercraft are direct descendants of the technology found in high-end UAVs. Steering a PWC in a dynamic aquatic environment requires a complex synergy of mechanical thrust, electronic stabilization, and intelligent path-planning.
1. The Core Mechanics: Thrust Vectoring and Directional Control
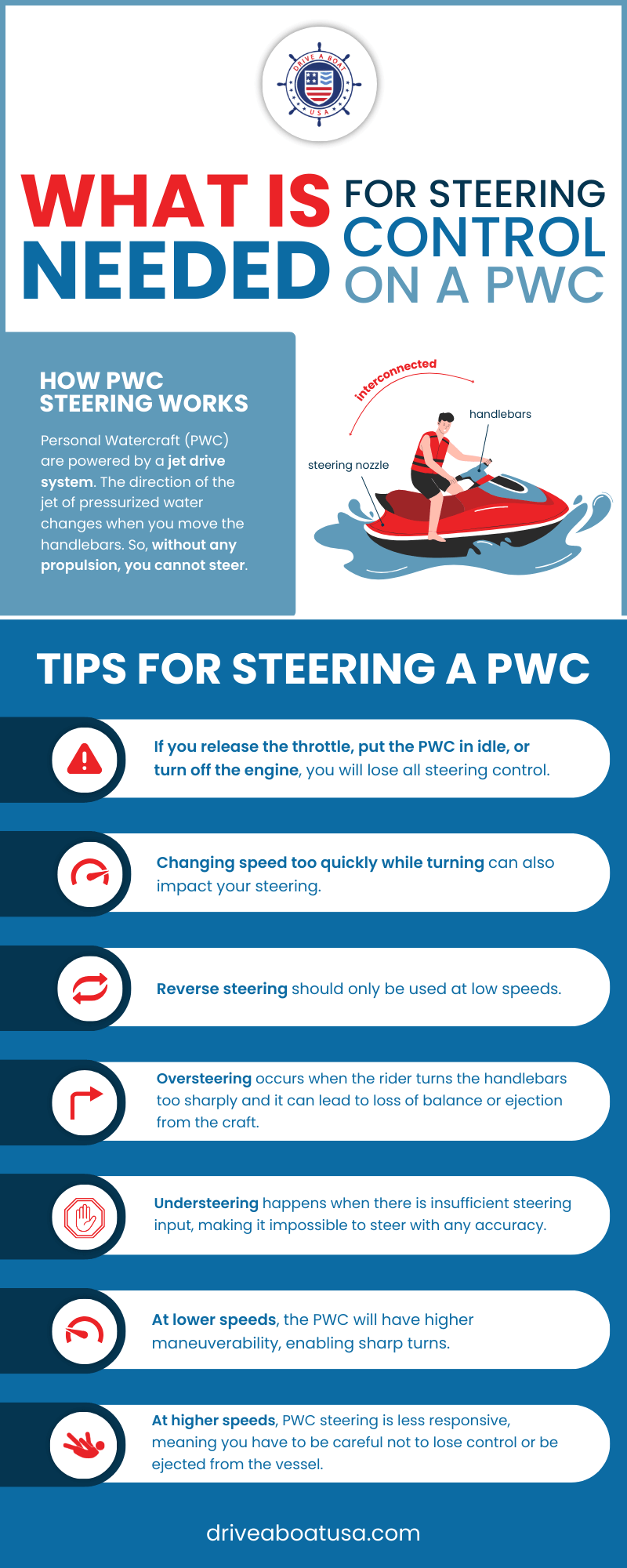
Unlike traditional boats that rely on a rudder to deflect water flow, a personal watercraft typically utilizes a jet propulsion system. Steering control in these vessels is fundamentally different and requires a specific set of mechanical and electronic components to manage directional change effectively.
The Steering Nozzle and Pump Assembly
At the heart of PWC steering is the steerable nozzle. The engine drives an internal impeller that draws water in and forces it out through a rear nozzle at high velocity. To change direction, the operator (or the autonomous controller) must physically pivot this nozzle. This is known as thrust vectoring. In the context of “Flight Technology,” this is analogous to the varying RPMs of drone motors or the movement of servos on a fixed-wing aircraft’s ailerons. Without thrust, there is no steering; this “off-throttle steering” challenge is a major focus for modern navigation systems.
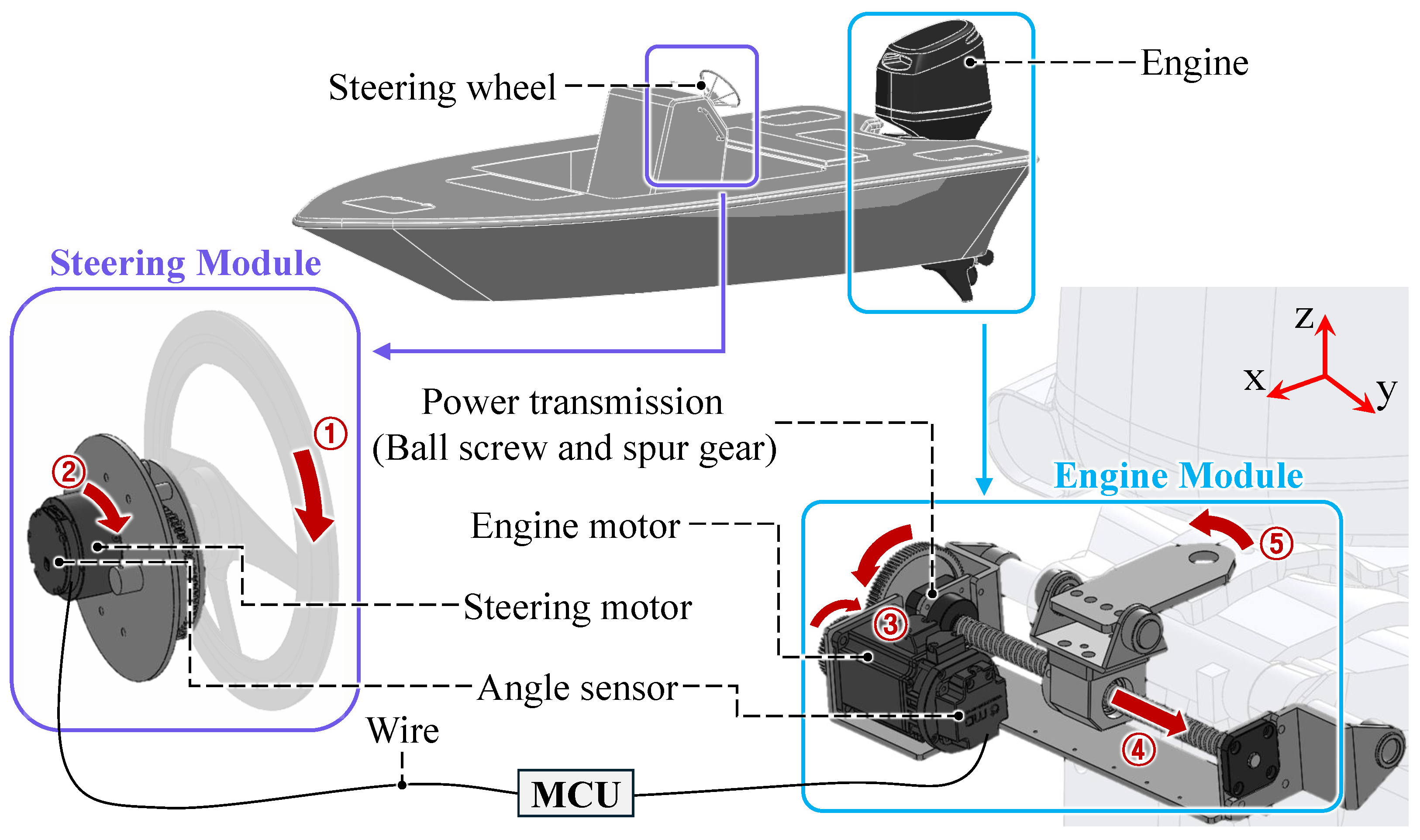
Actuators and Servo Systems
In autonomous or remote-controlled personal watercraft, the physical movement of the nozzle is handled by high-torque servos or linear actuators. These components must be integrated with the craft’s electronic brain. For precise steering control, these actuators require high resolution and low latency. If the actuator cannot respond within milliseconds to a command from the navigation system, the craft will “hunt” for its heading, leading to oscillation and instability—a common problem solved by advanced flight-derived stabilization algorithms.
2. Integrated Navigation and Stabilization Systems
Steering a personal watercraft isn’t just about moving a nozzle; it’s about knowing where the craft is and where it is pointing. This is where Flight Technology (Category 2) becomes the dominant factor in PWC design.
The Inertial Measurement Unit (IMU)
In the drone world, the IMU is the most critical sensor for stabilization. The same is true for a personal watercraft. An IMU consists of gyroscopes and accelerometers that track the craft’s pitch, roll, and yaw. On the water, waves create constant “noise” that tries to knock the craft off course.
A sophisticated steering system uses IMU data to provide active stabilization. If a wave hits the hull and forces the PWC to yaw to the left, the stabilization system detects this movement instantly and applies a counter-steer command to the nozzle. This ensures that the craft maintains a straight line even in choppy conditions, much like how a drone maintains a level hover in gusty winds.
GPS and GNSS Integration
For any meaningful steering control over distance, Global Navigation Satellite Systems (GNSS) are essential. Modern PWCs used for mapping or autonomous transit utilize multi-constellation GPS (including GLONASS, Galileo, and BeiDou) to pinpoint their location.
However, standard GPS is often not precise enough for tight maneuvers or docking. Therefore, “Flight Tech” solutions like RTK (Real-Time Kinematic) positioning are often employed. RTK provides centimeter-level accuracy, allowing the steering system to guide the PWC through narrow channels or toward a precise recovery point with surgical precision.
Magnetometers and Digital Compasses
While GPS tells the system where the craft is, the magnetometer tells it which way it is facing. In maritime environments, magnetic interference can be a significant hurdle. Advanced steering controllers utilize dual-magnetometer setups and “sensor fusion”—a process where GPS data and compass data are cross-referenced to eliminate “heading drift.” This ensures that when a “steer north” command is given, the nozzle responds with perfect alignment.
3. The Role of Flight Controllers and PID Algorithms

The “brain” of the steering system is the controller. In the niche of advanced tech, we often see flight controllers (like the Pixhawk or proprietary DJI industrial boards) being adapted for watercraft.
Proportional-Integral-Derivative (PID) Tuning
The logic that governs steering control is usually based on a PID loop. This mathematical formula calculates the difference between the desired heading and the actual heading, then applies a correction.
- Proportional: How far off are we? (The immediate correction).
- Integral: How long have we been off? (Correcting for constant forces like wind or current).
- Derivative: How fast are we moving toward the correct heading? (Preventing overshooting).
Tuning these parameters is what makes the difference between a PWC that “snakes” across the water and one that travels with robotic precision. For a PWC, the “D” (Derivative) term is particularly important because water provides significant drag, and the momentum of a heavy hull is much harder to stop than that of a lightweight carbon-fiber drone.
Obstacle Avoidance and Path Planning
Steering control is useless if it leads the craft into a pier or a swimmer. Modern flight technology incorporates obstacle avoidance systems using LiDAR, ultrasonic sensors, or stereoscopic vision. In a PWC, these sensors scan the water’s surface for obstructions.
The steering system must be capable of “re-routing” in real-time. This involves complex path-planning algorithms that calculate a new trajectory around an obstacle and then translate that trajectory into specific nozzle angles and throttle inputs. This level of autonomy is the peak of current marine steering technology.
4. Communication and Telemetry Links
You cannot have steering control without a reliable way to transmit commands and receive feedback. This brings us to the communication architecture derived from long-range drone technology.
Radio Frequency (RF) and Satellite Links
For remote steering, a high-bandwidth RF link is required. Using frequencies like 2.4GHz or 5.8GHz is common for short-range line-of-sight control. However, for “Personal Watercraft” operating as long-range USVs, cellular (4G/5G) or even SATCOM (Satellite Communication) links are necessary. The steering control system must be designed to handle “latency”—the delay between a command being sent and the nozzle moving. Advanced flight tech uses “predictive lag compensation” to ensure the operator remains in control even when the signal is delayed by a fraction of a second.
Telemetry and Real-Time Feedback
Steering isn’t a one-way street. The controller needs to send telemetry back to the user. This includes the current nozzle angle, the engine RPM, the battery or fuel levels, and the “Cross-Track Error” (how far the craft has drifted from its intended path). This feedback loop allows the steering system to adjust dynamically. If the telemetry shows that the nozzle is at maximum deflection but the craft is not turning, the system can diagnose a mechanical failure or a pump clog and switch to a failsafe mode.
5. Environmental Factors and Failsafe Protocols
Finally, effective steering control requires a deep integration of safety tech. The water is a harsh environment, and “Flight Technology” offers the best solutions for mitigating risk.
Geo-Fencing and Return-to-Home (RTH)
Just like a drone, a modern PWC steering system should be equipped with geo-fencing. This software-defined boundary prevents the craft from steering out of a designated safe zone. If the craft loses its connection to the controller, the “Return-to-Home” protocol takes over. The steering system uses its internal GPS log to navigate back to the launch point, autonomously managing the throttle and nozzle to avoid hazards along the way.
Redundancy and Waterproofing
In the world of flight tech, redundancy is life. For steering control on a watercraft, this means having redundant power supplies for the steering servos and often dual-IMU setups. Furthermore, since electronics and saltwater are natural enemies, all steering components—from the flight controller to the actuators—must be housed in IP67 or IP68-rated enclosures. The “steering” is only as good as the wires that carry the signals, making environmental hardening a core part of the technology stack.
Conclusion
Steering control on a personal watercraft has evolved far beyond a simple cable connected to a handlebar. Today, it is a sophisticated discipline within Flight Technology, utilizing the same sensors, algorithms, and stabilization techniques that keep the world’s most advanced drones in the air. From the mechanical precision of thrust-vectoring nozzles to the digital complexity of RTK-GPS and PID tuning, every component is essential for maintaining control in the unpredictable marine environment. As we move toward a future of fully autonomous watercraft, the synergy between aerial flight tech and maritime navigation will only continue to grow, making our “personal watercraft” smarter, safer, and more precise than ever before.