The concept of a “limit” is a cornerstone of calculus and, by extension, a fundamental principle that underpins much of modern technological innovation, particularly within the realm of advanced flight systems. While the term “limit definition” might initially conjure abstract mathematical formulas, its implications are deeply intertwined with the precision, predictability, and performance of technologies that rely on continuous change and infinitesimal adjustments. This exploration will delve into the mathematical definition of a limit and then pivot to its critical applications within the domain of Flight Technology, examining how this abstract concept translates into tangible advancements in navigation, stabilization, and autonomous operation.
The Mathematical Foundation of Limits
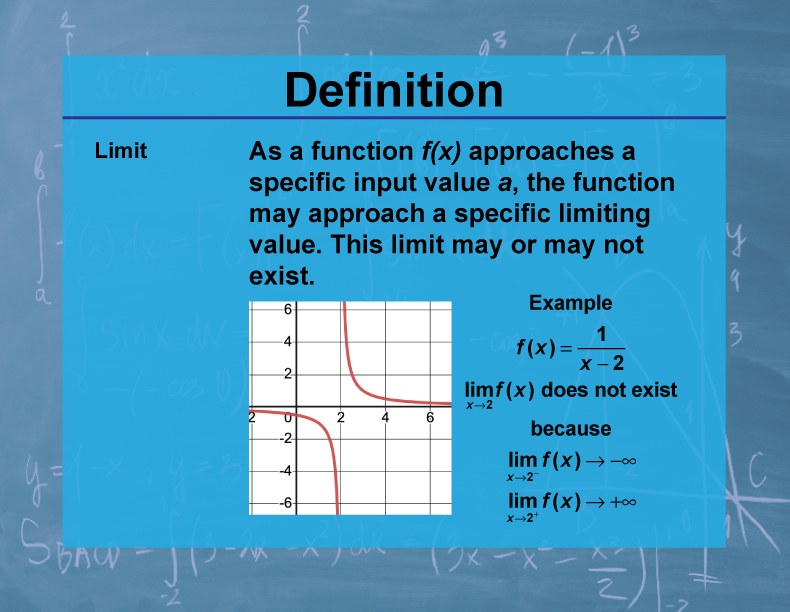
At its core, the limit of a function describes the behavior of that function as its input approaches a particular value. It’s not necessarily about what happens at that specific value, but rather what value the function’s output tends towards as the input gets arbitrarily close.
The Epsilon-Delta Definition
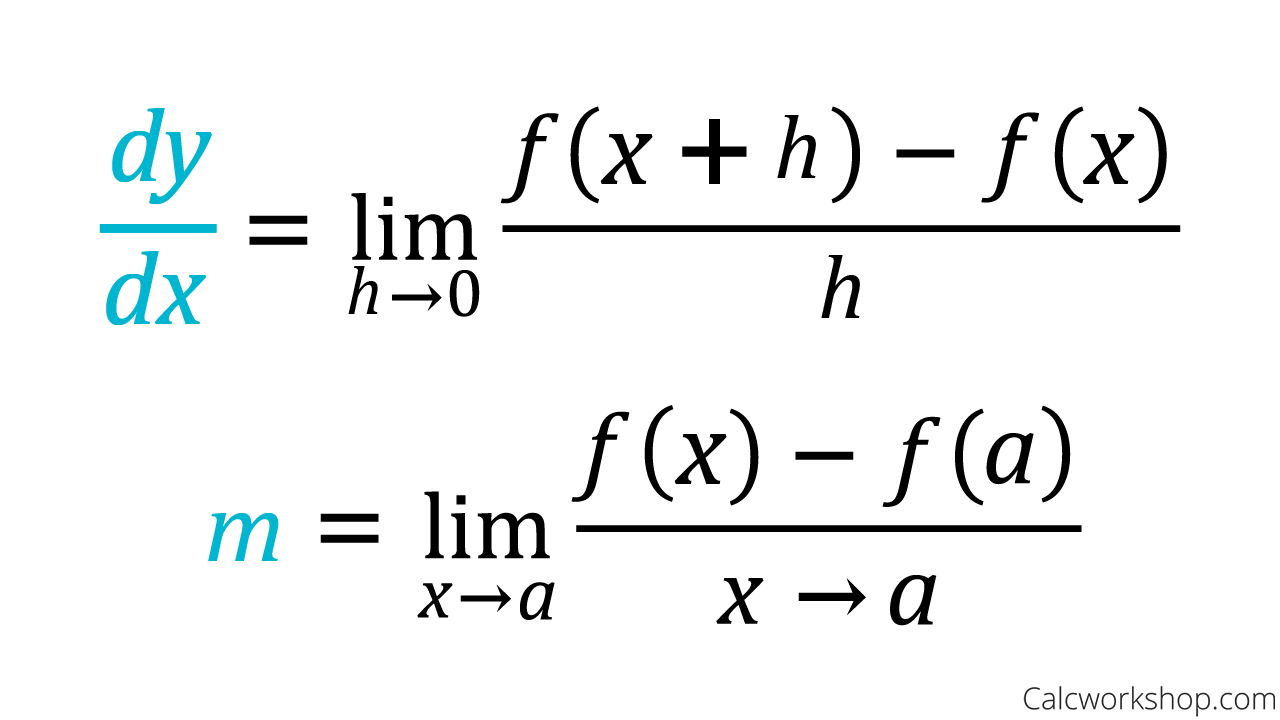
The rigorous mathematical definition of a limit, often referred to as the epsilon-delta (ε-δ) definition, provides a precise way to capture this intuitive idea. For a function (f(x)) and a point (c), we say that the limit of (f(x)) as (x) approaches (c) is (L), written as:
[ lim_{x to c} f(x) = L ]if and only if for every real number ε > 0 (epsilon), there exists a real number δ > 0 (delta) such that if 0 < |x – c| < δ, then |f(x) – L| < ε.
Let’s break this down:
- ε (Epsilon): This represents an arbitrarily small positive tolerance for the output of the function (f(x)). It defines how close we want (f(x)) to be to the limit (L).
- δ (Delta): This represents an arbitrarily small positive tolerance for the input of the function (x). It defines how close (x) needs to be to (c) to ensure (f(x)) is within the ε tolerance of (L).
- 0 < |x - c| < δ: This condition states that (x) is close to (c), but not equal to (c). We are interested in the behavior near (c), not necessarily at (c).
- |f(x) – L| < ε: This condition states that the output of the function, (f(x)), is within the specified tolerance (ε) of the limit (L).
In essence, the epsilon-delta definition guarantees that we can make the function’s output arbitrarily close to (L) by choosing an input (x) sufficiently close to (c). This framework is crucial for understanding continuity, derivatives, and integrals – all vital components of advanced engineering.
Intuitive Understanding of Limits
Beyond the formal definition, understanding limits involves grasping the concept of “approaching.” Imagine walking along the graph of a function. As you get closer and closer to a specific x-value, the y-value you are approaching is the limit. This holds true even if there’s a hole in the graph at that exact x-value, or if the function behaves differently at that point. The limit is solely concerned with the trend as you get infinitesimally near.
Limits in Flight Technology: Precision and Predictability
The principles of limits are not confined to abstract mathematical exercises; they are foundational to the design and operation of sophisticated flight technologies. From the intricate dance of a drone maintaining its altitude to the seamless guidance of a commercial aircraft through turbulent air, limits dictate the acceptable range of deviation and the desired trajectory.
Navigation Systems and Trajectory Following
Modern navigation systems, especially those employed in Unmanned Aerial Vehicles (UAVs) and advanced aircraft, rely heavily on the concept of limits to ensure accurate path following. When a UAV is programmed to follow a specific flight path, its navigation system constantly compares its current position with the desired trajectory.
Waypoint Accuracy
Consider a UAV tasked with visiting a series of waypoints. The flight controller must ensure that the UAV’s position remains within a defined proximity of each waypoint. This proximity can be thought of as a tolerance – a limit. The system calculates the difference between the desired waypoint coordinates and the UAV’s current GPS coordinates. The goal is for this difference to be less than a specified delta (δ) representing the acceptable deviation for reaching the waypoint (c). Similarly, the UAV’s actual position (f(x)) must be within an epsilon (ε) tolerance of the intended waypoint location (L). If the deviation exceeds these limits, corrective actions are initiated.
Continuous Path Smoothing
Beyond discrete waypoints, the flight path itself is a continuous function of time. Advanced navigation algorithms use principles akin to limits to smooth out the path between waypoints, avoiding jerky movements and ensuring a more cinematic or operationally efficient trajectory. The rate of change of velocity and acceleration are also managed within specific limits to prevent excessive G-forces or instability.
Stabilization Systems and Attitude Control
Maintaining a stable flight attitude is paramount for any aircraft, especially for drones performing complex maneuvers or carrying sensitive payloads. Stabilization systems, often employing gyroscopes, accelerometers, and sophisticated control algorithms, utilize limit-based principles to counteract disturbances.
Gyroscopic Drift and Compensation
Gyroscopes measure angular velocity. However, they are susceptible to drift over time. Stabilization algorithms use the measured drift and compare it against an acceptable limit of deviation from zero angular rate. If the drift exceeds this limit, the system initiates corrective actions by subtly adjusting control surfaces or motor speeds. This ensures that the drone’s attitude remains within the desired parameters, effectively applying a limit to the permissible drift.
Altitude Hold and Vertical Speed Control
For drones equipped with altitude hold functionality, the system continuously monitors the aircraft’s vertical position relative to a target altitude. The difference between the current altitude and the target altitude is a key variable. The stabilization system aims to keep this difference within a very small, predefined limit (ε). If the altitude begins to deviate beyond this limit (0 < |altitude – target_altitude| < δ), the system will adjust motor power to bring it back within tolerance. Similarly, the vertical speed of the drone is also managed within specific limits to prevent rapid ascents or descents that could lead to instability or damage.
Sensor Data Filtering and Noise Reduction
Flight technologies rely on a multitude of sensors to perceive their environment and their own state. These sensors generate data that is often noisy. The process of filtering this data to extract meaningful information involves principles related to limits.
Signal Averaging and Thresholding
When analyzing sensor readings, such as LIDAR or sonar data for obstacle avoidance, engineers often employ techniques that involve averaging readings over a short period. This averaging process can be conceptualized as finding a limit – the average value that the noisy signal is approaching. Furthermore, decisions about whether an object is an obstacle or not are often made based on whether the detected distance falls below a certain threshold. This threshold acts as a limit, defining the boundary between a safe operating space and a hazardous zone.
Kalman Filters and State Estimation
More advanced state estimation techniques, such as the Kalman filter, which is widely used in navigation and control systems, inherently deal with uncertainties and deviations. The Kalman filter aims to estimate the true state of a system (e.g., position, velocity) by minimizing the mean squared error between the estimated state and the true state. This minimization process is deeply rooted in statistical concepts that, while not always explicitly stated as epsilon-delta limits, operate on the principle of bringing estimated values arbitrarily close to true values by accounting for known uncertainties and measurement noise. The filter’s covariance matrices, which represent the uncertainty in its estimates, are akin to managing the bounds within which the true state is expected to lie – effectively setting limits on the acceptable error.
Limits in Autonomous Flight and Decision Making
As flight technologies become more autonomous, the application of limit-based reasoning extends to higher-level decision-making processes. Autonomous systems must operate within defined boundaries and make choices that ensure safety and mission success.
Obstacle Avoidance and Collision Prediction
Autonomous drones utilize sophisticated obstacle avoidance systems. These systems constantly process sensor data to identify potential collisions. The decision to alter course or brake is triggered when the predicted trajectory of the drone intersects with the predicted trajectory of an obstacle within a certain time horizon. This prediction and intersection check are fundamentally about identifying when a collision event is “approaching” a critical limit.
Proximity Warnings and Evasive Maneuvers
When an obstacle is detected within a predefined proximity zone – a clear application of a spatial limit – the system may first issue a warning. If the obstacle continues to approach or the proximity decreases beyond a critical safety limit (ε), an evasive maneuver will be initiated. The parameters of this maneuver (e.g., turning radius, acceleration) will themselves be governed by other limits related to the drone’s dynamic capabilities and the surrounding environment.
Geofencing and Restricted Airspace Management
Geofencing is a critical safety feature that defines virtual boundaries around specific areas. Aircraft equipped with geofencing technology will not be permitted to enter or operate within these restricted zones. The system continuously monitors the aircraft’s position relative to the geofence boundary. When the aircraft’s position approaches this boundary (within a specified delta, δ, of the defined perimeter), the system intervenes.
Boundary Compliance and Altitude Restrictions
The intervention can take various forms, such as preventing further ascent or descent, or even initiating a controlled landing if the aircraft attempts to breach the boundary. This ensures that the aircraft’s flight remains within the permissible limits of the designated airspace, contributing to overall aviation safety and regulatory compliance. The concept of “approaching the limit” is directly translated into a physical constraint on the aircraft’s movement.
Mission Parameter Management
Autonomous missions are defined by a set of operational parameters that must be respected. These parameters, such as maximum flight time, battery level thresholds, or payload operational limits, all function as limits that the autonomous system must continuously monitor and adhere to.
Battery Life and Return-to-Home Protocols
A crucial limit in drone operations is battery life. As the battery level depletes, the system continuously calculates the remaining flight time and compares it to the time required to return to a safe landing zone. When the remaining flight time approaches a critical limit that would make a safe return impossible, the Return-to-Home (RTH) protocol is automatically triggered. This ensures that the drone does not exceed its operational limits and remains safely controllable.
Conclusion: The Ubiquitous Influence of Limits
The seemingly abstract mathematical definition of a limit—the epsilon-delta formulation—is far from a mere academic curiosity. It is a fundamental concept that underpins the precision, reliability, and safety of advanced flight technologies. From the intricate algorithms that keep drones stable in turbulent winds to the sophisticated navigation systems that guide autonomous aircraft, the principle of approaching and adhering to defined boundaries is paramount. As flight technology continues to evolve, pushing the boundaries of what is possible, a deep understanding of limits will remain essential for innovation, ensuring that these increasingly capable machines operate predictably and safely within their intended parameters. The “limit definition” is, in essence, the mathematical language of control, predictability, and ultimately, safe flight.