In the rapidly evolving landscape of drone technology, the capabilities of Unmanned Aerial Vehicles (UAVs) extend far beyond simple remote control. From autonomous flight and sophisticated AI-driven features to intricate mapping and remote sensing applications, the underlying innovations are often rooted in fundamental mathematical principles. Among these, the concepts of “intercept” and “slope” stand out as deceptively simple yet profoundly powerful tools that form the bedrock of many advanced drone functions. While these terms might recall basic algebra, their application in drone technology provides critical insights into how these intelligent machines perceive, interpret, and interact with their environment. Understanding intercept and slope is essential for appreciating the precision, efficiency, and autonomy that define modern drone innovation. They are not merely abstract mathematical constructs but practical parameters that enable everything from accurate sensor calibration to predictive flight path generation, making complex aerial operations possible and reliable.
The Core Concepts: Intercept and Slope Explained
At their heart, intercept and slope describe the characteristics of a straight line, which serves as a foundational model for countless real-world phenomena. In a two-dimensional coordinate system, a straight line can be mathematically represented by the equation y = mx + b. Here, y and x are variables, while m and b are constants that define the line’s unique properties.
Defining the Intercept: The Starting Point
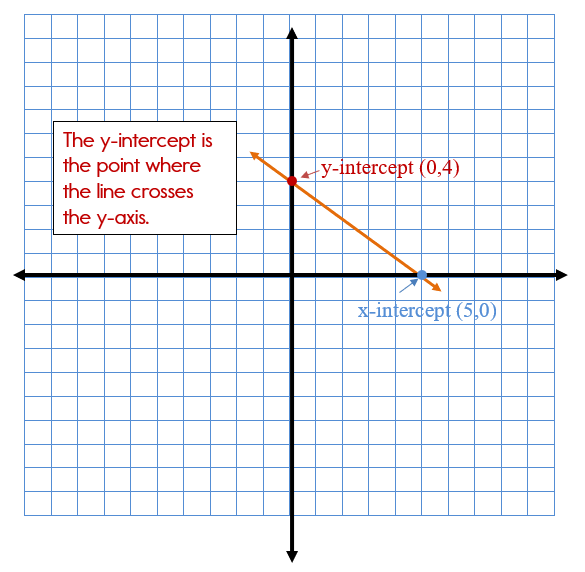
The “intercept,” specifically the y-intercept (represented by b in the equation y = mx + b), is the point where the line crosses the y-axis. Conceptually, it represents the value of y when x is zero. In practical terms within drone technology, the intercept often signifies a baseline, an initial condition, or an offset. For instance, in sensor calibration, an intercept might represent the inherent bias or zero-point error of a sensor when it should ideally be reading zero. If a drone’s altimeter reads 5 meters when it’s actually on the ground (zero altitude), that 5 meters is an intercept—a constant offset that needs to be accounted for in subsequent readings to ensure accurate height measurement. Similarly, in a predictive model, the intercept could indicate the starting value of a parameter before any influencing factors (represented by x) begin to exert their effect. It provides the crucial context for understanding where a process or measurement begins before dynamic changes are considered.
Understanding the Slope: The Rate of Change
The “slope” (represented by m in y = mx + b) quantifies the steepness and direction of a line. Mathematically, it is defined as the “rise over run”—the change in y divided by the change in x (Δy / Δx). A positive slope indicates that y increases as x increases, while a negative slope means y decreases as x increases. A zero slope signifies a horizontal line, meaning y does not change with x. In the context of drone technology, the slope is invaluable for representing rates of change, sensitivities, and relationships between different variables. For example, if we plot the drone’s motor speed (x) against its ascent rate (y), the slope of the resulting line would tell us how much the ascent rate changes for every unit increase in motor speed—essentially, the motor’s efficiency in generating vertical lift. In another scenario, the slope might represent the sensitivity of a GPS sensor’s error with respect to environmental interference, or the rate at which battery voltage drops as power consumption increases. Understanding the slope allows engineers and algorithms to predict outcomes, characterize system behavior, and design more responsive and efficient drone operations.
Intercept and Slope in Drone Data Analysis and Algorithmic Control
The power of intercept and slope becomes particularly evident in the realm of drone data analysis and the sophisticated algorithms that govern their behavior. Modern drones collect vast amounts of data from various sensors, and making sense of this data, as well as using it to make real-time decisions, often relies on linear models built upon these fundamental concepts.
Modeling Sensor Data: Calibration and Interpretation
One of the most critical applications of intercept and slope is in the calibration and interpretation of sensor data. Drones are equipped with an array of sensors—accelerometers, gyroscopes, magnetometers, barometers, GPS receivers, and more—each providing crucial input for flight control and autonomous functions. However, raw sensor data is rarely perfect; it often contains biases, noise, and varying sensitivities.
When calibrating a sensor, engineers often perform a series of measurements across a known range of inputs and plot the sensor’s output against the true values. If the relationship is linear (or can be approximated as such), linear regression can be used to fit a line to this data. The resulting intercept reveals any systematic offset or zero-point error in the sensor. For instance, if a temperature sensor reads 2°C when the actual temperature is 0°C, the intercept would be 2. The slope of this regression line indicates the sensor’s sensitivity or gain—how much the sensor’s output changes for a given change in the physical quantity it measures. A slope of 1 would mean perfect one-to-one correspondence, while a slope greater or less than 1 would indicate over- or under-reporting, respectively. By identifying and correcting for these intercept and slope values, drone systems can achieve highly accurate and reliable sensor readings, which are vital for stable flight and precise navigation.
Predictive Control Systems: Estimating Trajectories and States
Autonomous drones rely heavily on predictive control systems to anticipate future states and movements. These systems are essential for tasks like maintaining a desired flight path, performing smooth maneuvers, and responding to dynamic environmental conditions. Intercept and slope play a role in simplified predictive models, especially when extrapolating trends over short time horizons.
For example, if a drone is tracking an object (e.g., using AI follow mode), it needs to predict the object’s next position to maintain pursuit. If the object’s movement is relatively constant in speed and direction (a linear approximation), the drone can use the object’s current position (an intercept-like starting point) and its velocity (the slope of its position-over-time graph) to estimate where it will be in the immediate future. This allows the drone to adjust its own trajectory proactively rather than reactively, leading to smoother tracking and more efficient operation. Similarly, in predicting the drone’s own energy consumption or battery life, a linear model might use the current battery level (intercept) and the rate of discharge (slope) to estimate remaining flight time, enabling smarter power management.
Algorithmic Responses: Adjusting to Dynamic Environments
The ability of a drone to intelligently adjust its behavior in response to its environment is a hallmark of advanced technology and innovation. Algorithms that govern stabilization, obstacle avoidance, and adaptive flight modes frequently leverage the principles of intercept and slope, often within PID (Proportional-Integral-Derivative) controllers or more complex adaptive control schemes.
Consider a drone attempting to hover in windy conditions. Its control system constantly monitors its position and orientation, comparing them to desired setpoints. If the drone is pushed off course, the control algorithm calculates the deviation. In a simplified scenario, the change required in motor thrust (output y) might be linearly related to the positional error (input x). The slope would represent the controller’s gain—how aggressively it reacts to correct an error—while the intercept might represent a steady-state bias needed to counteract a constant force like a prevailing wind. This isn’t strictly linear in complex systems, but linear approximations and the underlying concepts of rate of change (slope) and baseline adjustment (intercept) are fundamental to how these algorithms are designed and tuned to achieve stability and responsiveness. The continuous calculation and application of these linear adjustments allow the drone to maintain control and perform its mission effectively despite external disturbances.
Enhancing Autonomous Flight and AI Capabilities
The integration of intercept and slope concepts is particularly vital in pushing the boundaries of autonomous flight and sophisticated AI features in drones. These mathematical tools underpin the algorithms that allow drones to make intelligent decisions, navigate complex environments, and perform tasks with minimal human intervention.
AI Follow Modes: Tracking Objects with Linear Prediction
AI follow mode is a prime example of where intercept and slope contribute to intelligent drone behavior. Whether tracking a person, vehicle, or animal, the drone’s AI system must continuously predict the target’s movement to maintain optimal positioning and capture stable footage.
The AI processes real-time visual data or GPS coordinates to identify the target’s current position and velocity. Using this information, it constructs a simplified linear model of the target’s trajectory. The target’s current location serves as the intercept for its predicted path, and its instantaneous velocity (speed and direction) dictates the slope of that path over a short predictive window. The drone’s flight controller then uses this predicted future position to calculate its own optimal trajectory, ensuring it always anticipates the target’s movement. Without these foundational linear predictions, the drone would constantly be playing catch-up, resulting in jerky movements and less effective tracking. This dynamic application of intercept and slope enables the seamless, “sticky” follow behavior that characterizes advanced AI drone systems.
Obstacle Avoidance: Projecting Paths to Prevent Collisions
Sophisticated obstacle avoidance systems, a cornerstone of drone safety and autonomy, also leverage the concepts of intercept and slope. Drones employ an array of sensors—Lidar, ultrasonic, visual—to detect objects in their flight path. Once an obstacle is detected, the drone must determine if it is on a collision course and, if so, how to avoid it.
The drone’s own current position serves as a starting point (an intercept) for its flight vector, and its current velocity defines the slope of its immediate trajectory. Concurrently, if an obstacle is moving, its current position and velocity are also modeled linearly. By projecting these linear paths forward, the drone’s collision avoidance algorithm can predict if and when an intersection will occur. If a collision is imminent, the system then calculates a new flight vector (a new slope) that will steer the drone safely around the obstacle, ensuring that its revised trajectory does not intersect with the obstacle’s predicted path. This real-time linear projection and recalculation are critical for preventing accidents and enabling drones to operate safely in dynamic and cluttered environments.
Path Planning and Optimization: Efficient Route Generation
Beyond immediate reactions, intercept and slope contribute to higher-level autonomous functions like path planning and optimization. For missions requiring coverage of a specific area (e.g., mapping, inspection), drones need to generate efficient routes that minimize flight time, energy consumption, or maximize data collection.
While complex path planning often involves advanced graph theory and optimization algorithms, linear approximations play a role in simplifying segments of these paths. For example, if a drone needs to travel between two waypoints, the most energy-efficient path is often a straight line. The starting waypoint is the initial intercept, and the vector connecting it to the destination defines the slope of the optimal direct trajectory. Even when navigating around obstacles or through complex terrains, segments of the overall path can be broken down into linear movements. Furthermore, in optimizing flight parameters like speed versus altitude for a given mission, linear models can help characterize the relationship between these variables and energy consumption, allowing the drone to select optimal operating points based on desired intercepts (e.g., target altitude) and slopes (e.g., descent rate for efficient landing). This foundational understanding helps the drone’s AI plan smarter, more efficient missions.
Mapping, Remote Sensing, and Data Interpretation
The applications of intercept and slope extend significantly into the realms of mapping, remote sensing, and the sophisticated data analysis required to extract meaningful insights from aerial data. These concepts are instrumental in transforming raw sensor readings into actionable information.
Geographic Data Interpretation: Trend Analysis and Elevation Models
In mapping and remote sensing, drones collect vast quantities of data, including elevation, temperature, vegetation indices, and more. Interpreting this data often involves identifying trends and creating models. For instance, generating Digital Elevation Models (DEMs) or analyzing topographical features can implicitly use linear relationships.
When analyzing a terrain profile, a linear segment might be characterized by its starting elevation (an intercept) and its gradient (a slope). In agricultural remote sensing, if researchers are monitoring crop health, they might correlate satellite imagery data (e.g., NDVI values) with ground truth measurements. A linear regression model can then be built where the intercept represents the baseline NDVI in healthy conditions, and the slope quantifies how much the NDVI value changes with a particular stressor. This allows for the precise detection of anomalies or trends across large geographical areas by using the drone’s data to fit and evaluate these linear models.
Sensor Fusion: Combining Data for Enhanced Accuracy
Modern drones utilize sensor fusion techniques to combine data from multiple disparate sensors (e.g., GPS, IMU, barometer, Lidar) to achieve a more accurate and robust understanding of their state and environment than any single sensor could provide alone. Intercept and slope play a role in weighting and combining these different data sources.
For example, an Extended Kalman Filter (EKF) or similar state estimation algorithm, which is common in sensor fusion, uses linear approximations of system dynamics and measurement models. When combining data from a GPS (which might have drift) and an IMU (which can accumulate error over time), the algorithms estimate the drone’s true position and velocity. Each sensor’s output is treated as a measurement with an associated uncertainty and a linear relationship to the true state. The intercepts might represent sensor biases, while slopes represent their sensitivities or how their readings relate to the overall system state. By understanding these linear characteristics, the fusion algorithm can optimally combine the data, leveraging the strengths of each sensor while mitigating their weaknesses, ultimately leading to highly accurate and stable navigation, which is critical for precise mapping and detailed remote sensing operations.
Environmental Monitoring: Detecting Changes Over Time
Drones are increasingly used for long-term environmental monitoring, from tracking deforestation to assessing pollution levels. Analyzing changes over time is often achieved through trend analysis, where intercept and slope are key descriptors.
If a drone periodically surveys a forest to monitor its biomass, the data collected over successive flights can be plotted against time. A linear trend line fitted to this data would have an intercept representing the initial biomass measurement and a slope indicating the rate of change in biomass over the monitoring period. A negative slope might indicate deforestation, while a positive slope could suggest reforestation efforts are succeeding. Similarly, for monitoring water quality, if a drone-mounted sensor measures a pollutant’s concentration at different locations, a linear model might describe how concentration changes with distance from a source (a slope) or the baseline concentration in a pristine area (an intercept). These applications enable environmental scientists to detect subtle shifts, predict future conditions, and make informed decisions based on robust, drone-derived data analysis.
The Future: Advanced Applications and Computational Demands
While intercept and slope are fundamental, their significance often lies in being the building blocks for more complex models and algorithms that define the future of drone innovation. As drones become more intelligent and autonomous, the demand for precise and efficient mathematical foundations continues to grow.
Beyond Linearity: Foundations for Complex Models
It’s important to acknowledge that the real world is rarely perfectly linear. However, complex non-linear relationships can often be approximated as linear over small intervals or within specific operating ranges. Intercept and slope provide the foundational understanding for breaking down these complex problems. For instance, machine learning algorithms, which power many advanced AI features in drones (like object recognition or complex decision-making), often utilize linear algebra and optimization techniques that, at their core, involve finding optimal “slopes” and “intercepts” in multi-dimensional spaces. Deep neural networks, while highly non-linear in their overall behavior, are composed of layers of interconnected “neurons” that perform weighted sums (linear combinations) of their inputs, adding biases (intercepts), before applying non-linear activation functions. Thus, understanding linear relationships is a stepping stone to grasping and developing sophisticated, non-linear AI and autonomous systems.
Real-Time Processing: The Need for Efficient Algorithms
The continuous operation of advanced drone features—from real-time object tracking to instantaneous obstacle avoidance—demands highly efficient algorithms. Linear calculations involving intercept and slope are computationally inexpensive compared to complex non-linear computations. This efficiency is critical for embedded systems on drones, where processing power and battery life are limited resources.
By relying on optimized linear models for tasks that can tolerate such approximations, drone developers can create responsive systems that make split-second decisions without excessive computational overhead. As drones take on more critical roles in logistics, surveillance, and public safety, the reliability and speed afforded by algorithms grounded in fundamental mathematical principles like intercept and slope will remain paramount. They enable the drones of today and tomorrow to operate with increasing autonomy, precision, and intelligence, transforming various industries and applications worldwide.