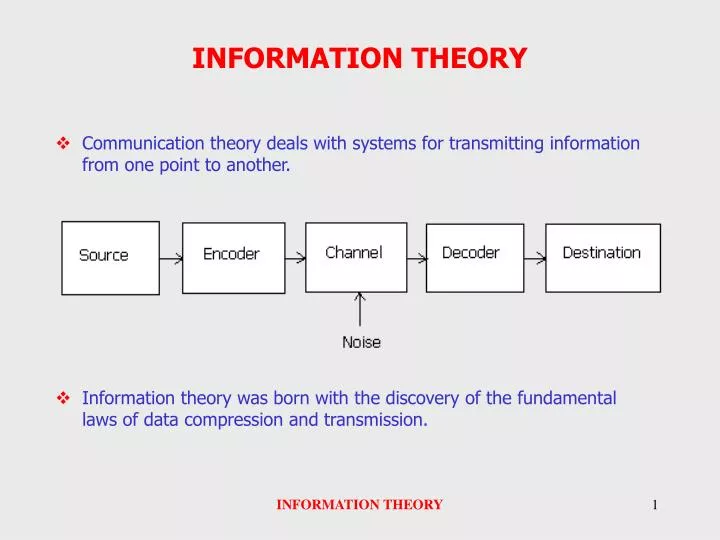
In the rapidly evolving world of drone technology, the advancements we witness daily—from autonomous flight and AI-powered tracking to intricate 3D mapping and sophisticated remote sensing—are not merely the product of better hardware or smarter software. Beneath these remarkable capabilities lies a fundamental scientific discipline that serves as their invisible backbone: information theory. Coined by Claude Shannon in 1948, information theory provides a mathematical framework for quantifying, storing, and communicating information. While it might sound abstract, its principles are profoundly practical, directly impacting the reliability, efficiency, and intelligence of modern unmanned aerial vehicles (UAVs).
For drones operating in the dynamic realm of “Tech & Innovation,” information theory is the silent architect that enables them to process vast amounts of sensor data, communicate wirelessly with precision, make autonomous decisions, and derive meaningful insights from their aerial perspectives. It’s the science that allows a drone to discern a target amidst clutter, reliably transmit a high-resolution map, or navigate complex environments with minimal human intervention. Understanding information theory is key to appreciating the engineering marvels that power today’s cutting-edge drone applications and anticipating the breakthroughs of tomorrow.
The Core Principles of Information Theory in Drone Operations
At its heart, information theory provides tools to understand the limits and possibilities of information handling. For drone technology, these principles are not academic curiosities but essential guidelines for designing systems that are robust, efficient, and intelligent. They inform everything from how much data a drone can transmit in a given time to how effectively it can compress a video feed without losing critical detail.
Quantifying Uncertainty: Entropy and Data Compression
One of the most foundational concepts in information theory is entropy, which quantifies the amount of uncertainty or “surprise” associated with a random variable, or in simpler terms, the amount of information it contains. A highly predictable event has low entropy, while an unpredictable event carries high entropy and thus more information. In drone operations, understanding entropy is crucial for optimizing data handling. For instance, if a drone’s camera is capturing a vast, uniform sky, there’s less “new” information per pixel compared to capturing a richly detailed urban landscape.
This concept directly underpins data compression, a vital technology for drones. High-resolution cameras, LiDAR sensors, and other advanced payloads generate colossal volumes of data. Transmitting and storing this data uncompressed would overwhelm bandwidth limitations and storage capacities. Information theory provides the theoretical limits for how much data can be compressed without losing critical information (lossless compression) or with an acceptable loss (lossy compression). For drone applications like aerial filmmaking, mapping, and remote sensing, efficient compression algorithms—informed by entropy principles—are indispensable. They allow drones to transmit high-quality 4K video streams, collect gigabytes of photogrammetry data for 3D models, or capture extensive multispectral imagery, all while staying within the practical constraints of onboard storage and wireless communication links. Without intelligent compression, the scope and scale of data collection by drones would be severely limited, hindering innovation in areas like real-time mapping or AI-driven environmental monitoring.
Reliable Communication: Channel Capacity and Error Correction
The ability of a drone to reliably communicate with its ground station, other drones, or even satellites is paramount for all advanced applications, especially in Tech & Innovation. This is where the principles of channel capacity and error correction become critical. Channel capacity, famously defined by Shannon’s theorem, represents the maximum rate at which information can be transmitted over a communication channel with an arbitrarily small error rate. It depends on the channel’s bandwidth and the signal-to-noise ratio (SNR). For drones, the communication link between the UAV and its controller or data receiver is a “noisy” channel, subject to interference from other wireless devices, environmental factors, and physical obstructions.
Information theory helps engineers design communication systems that approach this theoretical limit, ensuring that control commands reach the drone swiftly and accurately, and that telemetry data or video feeds are received intact. This is particularly vital for autonomous flight missions, where a lost or corrupted command could lead to mission failure or even a crash.
To combat the inherent noise and potential data corruption in wireless communication, error correction codes are employed. These codes, based on information theory principles, add redundant information to the data stream in a structured way. This redundancy allows the receiver to detect and often correct errors introduced during transmission, without needing to retransmit the entire message. For drone applications, from FPV racing where split-second, accurate video is crucial, to sophisticated remote sensing platforms transmitting sensitive scientific data, error correction ensures data integrity. It enhances the reliability of GPS signals, stabilizes real-time video feeds for AI object recognition, and guarantees the precision of critical commands for drone swarms. Without robust error correction, the vision of truly autonomous and interconnected drone systems would remain largely unattainable.
Information Theory’s Role in Autonomous Flight and AI
The quest for true drone autonomy and the integration of advanced artificial intelligence relies heavily on the principles of information theory. These areas transcend simple control; they involve complex sensing, perception, and decision-making processes that thrive on the efficient and intelligent handling of information.
Sensing and Perception: Extracting Meaning from Raw Data
Modern drones are equipped with an array of sophisticated sensors—Lidar, ultrasonic, thermal, high-resolution optical cameras, IMUs (Inertial Measurement Units), and GPS—each collecting a torrent of raw data about the drone’s environment and its own state. The challenge is not just collecting this data, but extracting meaningful information from it to build an accurate and actionable perception of the world. Information theory helps quantify the quality, relevance, and redundancy of data from these diverse sensors. For instance, when a drone’s AI is attempting to identify an object or navigate around an obstacle, the information content of a Lidar point cloud might be prioritized over certain visual data depending on lighting conditions, or vice-versa.
Data fusion, a critical component of autonomous flight, involves combining information from multiple sensors to achieve a more robust and complete understanding than any single sensor could provide. Information theory offers frameworks for optimal data fusion, helping algorithms weigh the credibility and information gain from each sensor stream. This ensures that the drone’s internal model of its environment is as accurate and comprehensive as possible, minimizing uncertainty and enabling safer, more efficient navigation and obstacle avoidance—features central to the “Tech & Innovation” category. From distinguishing a tree from a building for path planning to recognizing specific crop diseases in remote sensing, the ability to sift through raw data and distill meaningful information is a direct application of information theory principles.
Decision Making Under Uncertainty: Towards True Autonomy
One of the ultimate goals in drone innovation is achieving true autonomy, where drones can make intelligent decisions in complex, unpredictable environments without continuous human oversight. This involves navigating situations where information is often incomplete, uncertain, or noisy. Information theory provides the mathematical tools to formalize and manage this uncertainty, enabling AI algorithms to make informed choices.
For instance, in reinforcement learning algorithms—often used for teaching drones to perform complex maneuvers or adaptive tasks—the concept of “information gain” is crucial. The drone learns by making decisions that maximize the information it gains about its environment and the consequences of its actions, thereby refining its operational strategy. This is paramount for features like AI Follow Mode, where a drone must predict and react to a moving subject, or for dynamic path planning in urban environments.

Probabilistic reasoning, which heavily leverages information theory, allows drones to assess the likelihood of various outcomes based on their current perception and a history of observations. For example, an autonomous drone might use these principles to decide whether a distant, partially obscured object is a static obstacle or a moving vehicle, and adjust its flight path accordingly. By quantifying uncertainty and optimizing for information gain, information theory empowers drones to move beyond pre-programmed routines and make truly intelligent, adaptive decisions, pushing the boundaries of what’s possible in autonomous flight and advanced AI integration.
Optimizing Data for Mapping and Remote Sensing
Drones have revolutionized mapping and remote sensing, offering unprecedented access to aerial data for a multitude of applications, from precision agriculture to infrastructure inspection and urban planning. The efficacy of these applications hinges on the drone’s ability to collect, transmit, and process vast quantities of spatial data efficiently and accurately—a domain where information theory plays a critical role.
Maximizing Data Fidelity and Throughput
High-fidelity mapping and remote sensing require capturing extremely detailed data. For photogrammetry, this means millions of high-resolution images; for LiDAR, billions of point clouds; and for multispectral sensing, precise data across various light spectra. The sheer volume of this raw data presents significant challenges for storage and especially for transmission from the drone to a ground station or cloud platform. Information theory provides the foundational principles for maximizing data fidelity while ensuring optimal throughput over the wireless communication link.
Techniques like advanced video and image compression (e.g., H.265, JPEG 2000), which are rooted in entropy coding and rate-distortion theory, are essential. They allow drones to capture high-quality imagery (e.g., 4K or even 8K video) or vast numbers of high-resolution stills for 3D modeling, and then either store them efficiently onboard or transmit them quickly. Information theory guides the design of these compression algorithms to retain as much relevant spatial and spectral information as possible while drastically reducing file sizes. Furthermore, channel coding and modulation schemes, also derived from information theory, are optimized to push the limits of data transfer rates over varying distances and through challenging environments, ensuring that large datasets for extensive mapping projects can be downloaded without excessive delays or data loss. Without these optimizations, the practicality of large-scale, high-resolution aerial mapping and remote sensing would be severely limited.
Efficient Information Extraction and Analysis
Beyond merely collecting data, the true value of remote sensing lies in the efficient extraction and analysis of actionable information. A raw orthomosaic or a dense point cloud, while impressive, needs to be processed to reveal insights. Information theory contributes to this phase by underpinning the algorithms that enhance data quality, reduce noise, and highlight relevant features, thereby making the subsequent analysis more accurate and reliable.
For example, in precision agriculture, multispectral drones collect data that can indicate crop health, nutrient deficiencies, or pest infestations. The data, however, can be affected by atmospheric conditions or sensor noise. Information theory-guided signal processing techniques are used to filter out noise, sharpen boundaries, and enhance contrast, ensuring that the derived vegetation indices (like NDVI) are as accurate as possible. Similarly, in infrastructure inspection, algorithms rooted in information theory can help identify anomalies in collected thermal or optical data, distinguishing a genuine structural defect from sensor artifacts. By ensuring the quality and interpretability of the raw data, information theory supports sophisticated analytics and machine learning algorithms that can automatically detect patterns, classify objects, and quantify changes over time, ultimately translating raw aerial data into valuable intelligence for decision-makers. This ability to transform mere data into high-value information is a hallmark of innovation in drone applications.
The Future Landscape: Information Theory as a Catalyst for Drone Evolution
As drones become more sophisticated, networked, and autonomous, the role of information theory will only grow more profound. It will continue to be a primary catalyst for breakthroughs in complex drone behaviors, security, and resilience, defining the next generation of aerial robotics.
Pushing the Boundaries of Swarm Intelligence and Networked Drones
The future of drone innovation points towards increasingly complex systems: drone swarms operating collaboratively, networked drones sharing data in real-time, and fleets of UAVs coordinating for large-scale missions. For these highly interconnected systems, information theory is fundamental to designing robust and efficient communication protocols. Each drone in a swarm needs to communicate its position, status, and perceived environment to others, and receive commands or shared information in return. This creates a dense, multi-directional communication network that is highly susceptible to interference and data bottlenecks.
Information theory provides the blueprints for creating communication architectures that can handle this complexity. It helps engineers design optimal coding schemes, routing algorithms, and resource allocation strategies to ensure that information flows seamlessly and reliably within the swarm, even if individual communication links are compromised or bandwidth is limited. This enables synchronized movements, coordinated data collection, and distributed decision-making, where the collective intelligence of the swarm surpasses that of any individual drone. Achieving true swarm intelligence, capable of complex tasks like disaster response mapping or coordinated search and rescue, relies entirely on the ability of individual units to exchange high-fidelity, time-sensitive information effectively—a challenge that information theory is uniquely equipped to address.
Enhanced Security and Resilience
As drones take on more critical roles—from delivering packages and monitoring infrastructure to supporting defense operations—the security and resilience of their systems become paramount. This encompasses protecting against unauthorized access, jamming, spoofing, and ensuring continuous operation even in challenging or hostile environments. Here, too, information theory offers powerful tools.
For enhanced security, information theory underpins modern cryptography. Principles like perfect secrecy, established by Shannon, guide the development of encryption algorithms that protect drone communication and data from eavesdropping and tampering. Secure drone operation requires that command links, data uploads, and telemetry feeds are protected, and cryptographic methods rooted in information theory are the cornerstone of this protection. Furthermore, information theory plays a role in anti-jamming techniques, helping to design communication waveforms that are resilient to interference by maximizing the information content in a given signal, making it harder for adversaries to disrupt.
For resilience, information theory enhances a drone’s ability to withstand data loss or corruption. Beyond basic error correction, it informs adaptive communication strategies where a drone can dynamically adjust its data rate, coding scheme, or even switch communication channels based on real-time assessments of channel quality and information redundancy. This ensures mission continuity even in deteriorating communication environments or if certain data packets are irretrievably lost. In critical applications like autonomous delivery or remote sensing of valuable assets, this level of resilience, built on information theory, is not just an advantage—it’s a necessity for ensuring reliability and trust in drone technology.
Conclusion
From the moment a drone takes flight, collecting gigabytes of data with its advanced sensors, to its intricate dance of autonomous navigation and its seamless communication with a ground station or a networked swarm, every intelligent action is subtly guided by the principles of information theory. Far from being a niche academic pursuit, information theory is the unsung hero powering the “Tech & Innovation” landscape of the drone industry. It’s the foundational science that allows us to quantify uncertainty, transmit data reliably through noisy channels, compress vast amounts of information efficiently, and extract meaningful insights from complex sensor inputs.
As we push the boundaries of AI-powered autonomy, swarm intelligence, and hyper-connected drone systems, understanding and applying information theory will be more crucial than ever. It enables the creation of more robust, efficient, secure, and truly intelligent UAVs that can unlock unprecedented capabilities across countless industries. In essence, information theory is not just about data; it’s about making sense of the world, for both human and machine, and it remains an indispensable key to realizing the full, transformative potential of drone technology.