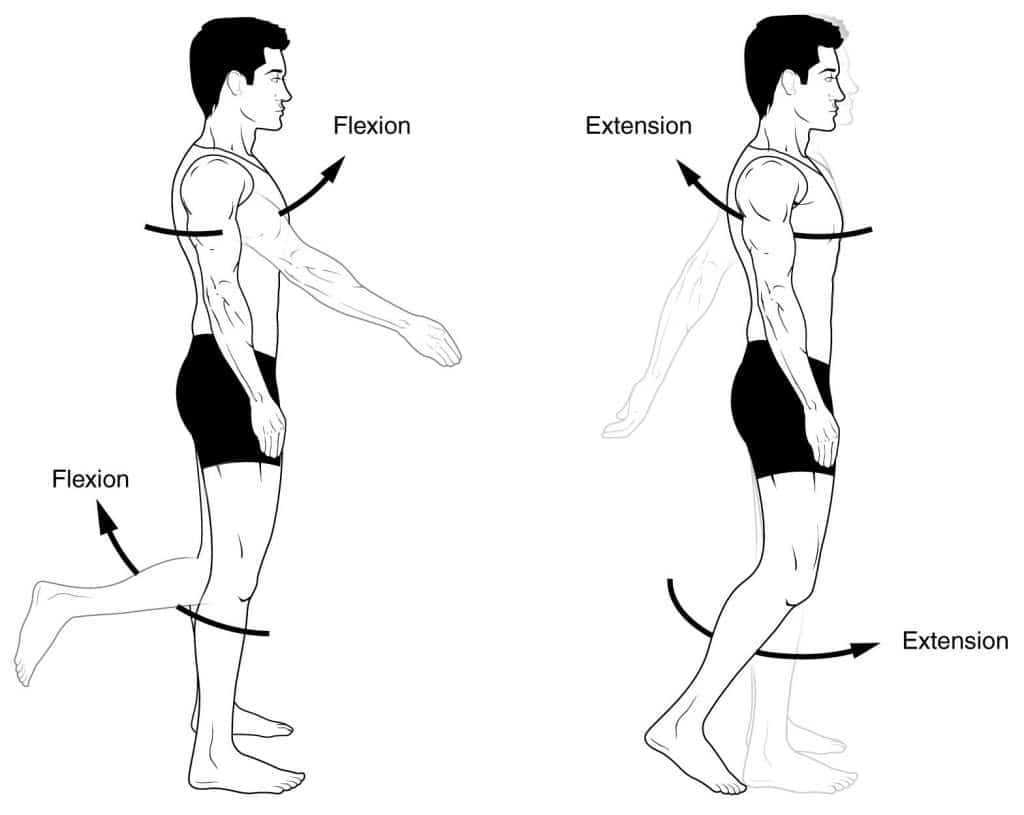
While the terms “flexion” and “extension” are fundamental concepts in anatomy and biomechanics, their underlying principles of movement have direct and significant applications within the realm of advanced flight technology, particularly in how robotic systems and aerial platforms achieve dynamic and precise maneuverability. Understanding these basic directional movements is crucial for appreciating the sophisticated control systems that enable drones to navigate complex environments, stabilize in turbulent conditions, and execute intricate aerial maneuvers.
The core idea behind flexion and extension in a mechanical context relates to the bending and straightening of a joint or a linkage. When applied to flight technology, we can interpret these terms metaphorically and literally. Metaphorically, they describe the dynamic adjustments and counter-movements a drone’s control system makes to maintain stability or achieve a desired trajectory. Literally, in the context of more advanced drone designs or specialized aerial robots, these terms can describe the physical articulation of components, such as robotic arms or adaptable wing structures, which directly influence flight characteristics.
This exploration will delve into how the principles of flexion and extension, as they relate to movement and articulation, are integrated into modern flight technology, focusing on their impact on drone control, stabilization, and the execution of complex flight patterns. We will examine the systems that mimic these fundamental movements to ensure flight robustness and the potential for future drone designs that incorporate physical articulation for enhanced aerial capabilities.
The Biomechanical Analogy in Drone Stabilization
The most prevalent application of flexion and extension principles in drone technology lies in their sophisticated stabilization systems. These systems are designed to counteract external forces and maintain a stable flight platform, much like muscles and joints work in concert to maintain balance and posture in living organisms.
Active Stabilization and Counter-Movement
At its heart, a drone’s ability to stay level and resist unwanted pitches, rolls, and yaws is a continuous process of active stabilization. When a gust of wind, for instance, pushes a drone off its intended heading, the flight controller immediately detects this deviation using onboard sensors. This detection triggers a rapid series of micro-adjustments to the speed of individual rotors.
Consider the analogy of a human arm trying to hold a tray steady. If the arm tilts slightly, the muscles will subtly contract or relax in specific ways to bring the arm back to level. Similarly, a drone’s flight controller, in response to external forces, will “flex” or “extend” its rotor speeds. If the drone starts to roll to the left, the flight controller will increase the speed of the rotors on the right side of the drone and decrease the speed of the rotors on the left. This differential thrust creates a torque that counteracts the roll, effectively “extending” the drone back to its upright position. Conversely, if a disturbance causes an opposite roll, the system will “flex” its rotor speeds in the other direction.
This constant, dynamic interplay of rotor speed adjustments, driven by sensor data and sophisticated algorithms, is a direct embodiment of the flexion and extension principle. The system is continuously reacting, bending its operational parameters to maintain equilibrium. The agility and precision of these adjustments are paramount, especially in environments with unpredictable air currents or when the drone is carrying sensitive payloads that require minimal vibration.
Inertial Measurement Units (IMUs) and Gyroscopic Principles
The intelligence behind these rapid adjustments comes from the Inertial Measurement Unit (IMU). An IMU typically comprises accelerometers and gyroscopes. Accelerometers measure linear acceleration, while gyroscopes measure angular velocity. Together, they provide the flight controller with critical data about the drone’s orientation and movement in three-dimensional space.
Gyroscopes, in particular, are central to detecting unwanted rotations. They operate on the principle of angular momentum. If the drone begins to rotate around an axis (pitch, roll, or yaw), the gyroscope within the IMU will detect this rotation. This detection is then fed to the flight controller. The controller’s algorithms interpret this angular velocity as a deviation from the desired stable state.
The flight controller then initiates a corrective action by manipulating the motor outputs. This action is essentially a controlled “flexion” or “extension” of the drone’s stability. For example, if the gyroscope detects a rapid pitch-down movement, the flight controller will command the rear motors to spin faster and the front motors to slow down, effectively “extending” the nose upward and counteracting the pitch. The speed at which these adjustments are made is critical; faster responses lead to more stable flight. The continuous feedback loop between the IMU, the flight controller, and the motors ensures that the drone maintains a stable flight envelope, even under challenging conditions.
Navigating Complex Environments: Precision Maneuvering
Beyond static stabilization, the principles of flexion and extension are fundamental to a drone’s ability to execute precise maneuvers and navigate through challenging environments. This involves not just correcting for external disturbances but actively changing the drone’s orientation and trajectory with deliberate control.
Articulation and Gimbal Systems
While many drones achieve directional control primarily through differential thrust, more advanced systems employ physical articulation, directly mirroring the concept of flexion and extension in mechanical limbs. Gimbal systems, which are ubiquitous on drones for camera stabilization, are a prime example. A gimbal system uses motors to control the pitch, roll, and yaw of the camera mount, allowing it to remain level even as the drone itself pitches, rolls, or yaws.
In this context, the gimbal’s motors are actively “flexing” and “extending” the camera mount’s position to compensate for the drone’s movements. This ensures that the captured footage remains smooth and stable. However, the concept can be extended further. Some specialized drones, particularly those designed for inspection or manipulation tasks, may incorporate robotic arms or articulated appendages. These arms themselves exhibit true flexion and extension at their joints, allowing them to reach, grasp, or interact with objects in their environment.
The control algorithms for these articulated systems are highly complex. They must manage not only the drone’s overall flight path but also the precise angles and movements of each articulated joint. This requires a deep understanding of kinematics and dynamics, ensuring that the combined movements result in the desired outcome without compromising the drone’s stability or control. For instance, extending a robotic arm outwards will alter the drone’s center of gravity, and the flight controller must compensate for this shift through precise rotor adjustments, a continuous dance of flexion and extension.
Trajectory Planning and Dynamic Flight Paths
The ability to execute complex flight paths is a hallmark of advanced drone capabilities. This involves not just following a pre-programmed route but dynamically adjusting the trajectory in real-time based on sensor data and mission objectives. The principles of flexion and extension are embedded within the algorithms that generate and execute these flight paths.
When a drone needs to perform a specific maneuver, such as a sharp turn, a rapid ascent, or a controlled descent, its flight controller must calculate the necessary adjustments to rotor speeds and, in some cases, the orientation of the entire airframe. A sharp turn, for example, involves a rapid change in yaw and often a slight bank (roll). The flight controller will command the motors to generate the appropriate torque to initiate and control this turn. This is, in essence, a deliberate “flexion” or “extension” of the drone’s rotational movement.
Furthermore, in scenarios where drones are tasked with tasks like obstacle avoidance or precision landing, the concept of “flexion” and “extension” becomes even more pronounced. If a drone encounters an unexpected obstacle, its path might need to “flex” around it. This requires the flight controller to rapidly calculate a new trajectory, involving a sequence of controlled pitches, rolls, and yaw adjustments. Similarly, during a precision landing, the drone may make a series of fine-tuned adjustments, “flexing” its descent angle and “extending” its braking thrust to achieve a pinpoint touchdown. These dynamic responses highlight how the fundamental biomechanical concepts of movement are translated into sophisticated algorithmic control for aerial vehicles.
Future Innovations: Articulated Drones and Beyond
The ongoing evolution of drone technology promises even more sophisticated applications of flexion and extension principles, moving beyond mere stabilization to encompass truly adaptable and versatile aerial platforms.
Morphing Wings and Adaptable Aerodynamics
One area of significant research and development is in the field of morphing wings. Unlike traditional fixed-wing aircraft or quadcopters with static rotor configurations, morphing wings have the ability to change their shape in flight. This allows for a dramatic improvement in aerodynamic efficiency and maneuverability across a wider range of flight conditions.
These morphing wings are designed with flexible materials and actuated linkages that can “flex” and “extend” to alter their camber, span, or sweep. For instance, a wing might “flex” to become more curved at lower speeds to increase lift, and then “extend” to become flatter at higher speeds for reduced drag. This biomimicry draws inspiration from birds and insects, whose wings are incredibly dynamic and adaptable.
The control systems for such morphing aircraft are extremely complex. They must precisely coordinate the movement of multiple actuators to achieve the desired wing shape while simultaneously managing the overall flight dynamics. The principles of flexion and extension are not just applied to individual joints but to the entire wing surface, allowing for a nuanced and continuous adaptation to the flight environment. This level of aerodynamic control opens up possibilities for drones that can operate in extremely varied conditions, from hovering efficiently to performing high-speed, agile maneuvers.
Robotic Manipulation and Dexterous Aerial Operations
The integration of robotic manipulation capabilities with aerial platforms represents a frontier where the concepts of flexion and extension become even more literal and critical. Drones equipped with dexterous robotic arms can perform a wide array of tasks that were previously impossible, from inspecting intricate infrastructure to assembling components in hard-to-reach locations.
These robotic arms are designed with multiple degrees of freedom, allowing their segments to articulate and “flex” and “extend” in a manner similar to human limbs. Each joint on the arm can be independently controlled, enabling the arm to reach, grasp, and manipulate objects with remarkable precision. The flight controller of the drone must then integrate the control of these robotic appendages with the drone’s own flight control.
For example, when a drone is tasked with tightening a bolt on a wind turbine, its flight controller must not only maintain the drone’s stable position but also precisely control the flexion and extension of its robotic arm to guide a tool to the bolt and apply the correct torque. This requires sophisticated inverse kinematics algorithms, which calculate the joint angles needed to achieve a desired end-effector position and orientation. The successful execution of such tasks is a testament to how fundamental biomechanical movements, like flexion and extension, are being translated into advanced robotic capabilities for aerial platforms, pushing the boundaries of what drones can achieve.
In conclusion, while the terms “flexion” and “extension” originate from the study of biological movement, their underlying principles of bending, straightening, and controlled articulation are fundamental to the sophisticated operation of modern flight technology. From the intricate dance of rotor speeds that stabilize a drone in turbulent air, to the complex articulation of robotic arms performing delicate tasks, these concepts are woven into the fabric of drone design, control, and future innovation, enabling increasingly capable and versatile aerial systems.