In the rapidly advancing world of unmanned aerial vehicles (UAVs), the bridge between hardware and intelligent behavior is built entirely on code. When we discuss the “brains” behind modern drones—the systems that allow them to recognize a face, map a forest, or navigate through a dense urban environment—we are often discussing the impact of programming paradigms. One of the most significant debates and technical choices in this field involves the use of dynamically typed languages. To understand the current landscape of drone tech and innovation, we must explore what a dynamically typed language is and how specific examples are currently revolutionizing the way we deploy autonomous flight systems.
Understanding Dynamic Typing in the Context of Drone Software
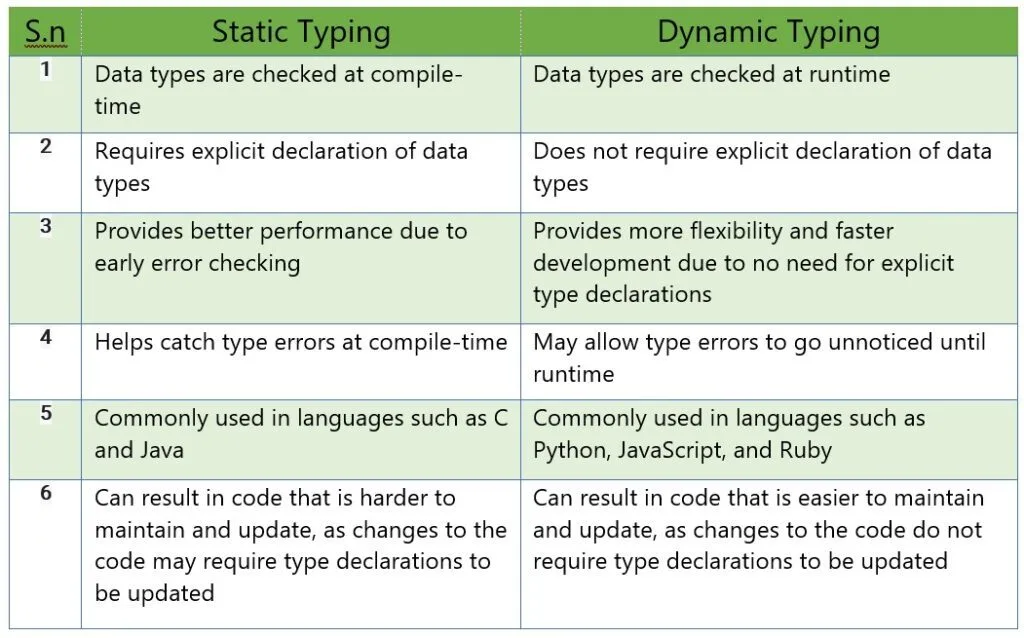
At its core, the distinction between programming languages often comes down to how they handle “types”—the classification of data such as integers, strings, or complex objects representing GPS coordinates. In a statically typed language (like C++), the type of a variable is known at compile-time, meaning the developer must explicitly define what kind of data a container will hold before the program ever runs.
Conversely, a dynamically typed language performs type checking at runtime. This means that a variable can hold a floating-point number representing a drone’s altitude one moment and a string representing a status error the next, without the need for rigid pre-definition. For drone innovators, this flexibility is not merely a convenience; it is a fundamental shift in how rapidly complex AI and flight logic can be developed.
The Shift Toward “Rapid Prototyping” in UAV Innovation
In the early days of flight stabilization, every millisecond of CPU cycle was precious, leading developers to stick strictly to low-level, statically typed languages. However, as drone hardware has become more powerful—incorporating onboard GPUs and multi-core processors—the industry has moved toward dynamic typing for high-level decision-making. The ability to write code that is concise and adaptable allows engineers to test new autonomous behaviors, such as AI-driven “Follow Me” modes, in a fraction of the time it would take in a more rigid environment.
Flexibility vs. Strictness in Real-Time Systems
While dynamic typing offers speed, it introduces a level of unpredictability that must be managed. In autonomous flight, an unexpected type error mid-air could lead to a catastrophic crash. Therefore, the “Tech & Innovation” sector of the drone industry has developed sophisticated “wrappers” and testing environments. This allows developers to enjoy the expressive power of dynamic languages while maintaining the safety standards required for heavy-duty industrial drones.
Leading Examples of Dynamically Typed Languages in the UAV Industry
When we look at the specific examples of dynamically typed languages used in drone technology, one name stands above the rest: Python. However, several other languages play crucial roles in specific niches of the autonomous ecosystem.
Python: The King of Drone Automation and Computer Vision
Python is arguably the most prominent example of a dynamically typed language in the tech world today, and its dominance in the drone sector is undeniable. Because Python is interpreted and dynamically typed, it serves as the perfect glue for complex libraries like OpenCV (for computer vision) and TensorFlow (for machine learning).
When a drone is tasked with “Remote Sensing” or “Autonomous Mapping,” it is often a Python script that orchestrates the data flow. The script takes raw pixel data from the camera, passes it through a neural network to identify objects, and then sends navigational commands to the flight controller. The dynamic nature of Python allows developers to manipulate these high-level data structures effortlessly, facilitating the rapid evolution of AI-driven flight modes.
JavaScript and Node.js: Powering Drone Web Interfaces and GCS
While Python handles the “thinking,” JavaScript—another dynamically typed powerhouse—frequently handles the “communication.” Ground Control Stations (GCS) and browser-based drone management platforms rely heavily on JavaScript. Its dynamic nature makes it exceptionally good at handling the asynchronous, unpredictable data packets coming from a fleet of drones over a 5G or satellite link. For innovations in “Drone Swarm” management and cloud-based mapping, JavaScript provides the flexibility needed to visualize real-time telemetry data across various devices.
Lua: Lightweight Scripting for Flight Controllers
In the niche of flight stabilization and custom flight modes, Lua is a frequently cited example of a dynamically typed language. It is incredibly lightweight and designed to be embedded within larger applications. Open-source flight stacks like ArduPilot use Lua scripting to allow users to add custom logic—such as a specific search-and-rescue pattern or a specialized landing sequence—without needing to recompile the entire firmware of the drone. This “innovation at the edge” is only possible because of Lua’s dynamic and forgiving syntax.

Technical Impact on Autonomous Flight and Sensor Fusion
The true innovation in modern drones lies in “Sensor Fusion”—the ability to combine data from IMUs, GPS, LiDAR, and optical sensors into a single, coherent picture of the world. Dynamically typed languages have become the primary tools for managing this complexity.
Rapid Iteration for Obstacle Avoidance Algorithms
Obstacle avoidance requires the drone to constantly interpret 3D space. Developing these algorithms involves constant tweaking of thresholds and logic. In a dynamically typed environment, an engineer can change how a “detected object” is represented—perhaps moving from a simple bounding box to a complex point cloud—without having to rewrite the underlying architecture of the entire software suite. This fluidity is why we have seen such a massive jump in the “AI Follow Mode” capabilities of consumer and enterprise drones over the last five years.
Handling Real-Time Data Streams without Verbose Constraints
Autonomous drones generate a massive amount of metadata every second. In a statically typed system, every piece of metadata must be perfectly categorized and predicted. Dynamic typing allows for more “schema-less” data handling. If a new sensor is added to a drone for a mapping mission, a dynamically typed script can often incorporate that data stream on the fly. This adaptability is crucial for “Remote Sensing” applications where the mission parameters might change based on the environmental conditions detected mid-flight.
Challenges and Optimizations for High-Performance Drone Computing
Despite the advantages of dynamic typing in innovation, the drone industry must address the inherent performance overhead. Dynamically typed languages are generally slower than their statically typed counterparts because the computer must spend time figuring out data types while the program is running.
Addressing Performance Overhead in Dynamic Environments
To bridge this gap, drone innovators use Just-In-Time (JIT) compilation and specialized interpreters. For example, in high-speed racing drones or autonomous interceptors, the “Tech & Innovation” focus shifts to making Python or Lua run as close to the hardware as possible. This ensures that the flexibility of the language does not result in “latency,” which could be the difference between a successful autonomous landing and a collision.
Hybrid Approaches: Integrating C++ with Dynamic Scripts
The most common solution in high-end autonomous flight is a hybrid architecture. The “inner loop” of the drone—the part that manages motor speeds and basic stability—is written in a static, high-performance language like C++. The “outer loop”—the part that manages AI, pathfinding, and mission logic—is written in a dynamically typed language like Python. This allows the drone to be both rock-solid in its flight mechanics and incredibly “smart” and adaptable in its high-level behavior.
The Future of Tech & Innovation: AI-Driven Autonomy
As we look toward the future of drone technology, the role of dynamically typed languages will only grow. The next frontier involves fully autonomous “Edge AI,” where the drone does not just follow a path but learns from its environment in real-time.
Machine Learning Frameworks and Dynamic Scripting
The world’s most advanced machine learning frameworks are built to be accessed via dynamic languages. As drones become more reliant on “Deep Learning” for tasks like agricultural crop analysis or structural inspection of bridges, the ease of using dynamic languages to implement these neural networks becomes a competitive advantage. Innovation in this sector is driven by the ability to take a research paper’s math and turn it into a flying prototype in a matter of days.

Toward Fully Autonomous Remote Sensing
The ultimate goal of drone innovation is a “black box” system where a user provides a goal (e.g., “Map this 50-acre construction site”), and the drone determines the best way to achieve it. This level of autonomy requires a software stack that can handle high-level logic, error recovery, and complex decision-making. Dynamically typed languages provide the most efficient path to this future, offering the “expressive power” required to code the nuances of human-like decision-making into an aerial platform.
In conclusion, while the hardware of a drone—the motors, the carbon fiber, the sensors—is impressive, it is the software that defines its intelligence. The use of dynamically typed languages like Python and Lua has lowered the barrier to entry for complex AI development, allowing for the rapid innovation we see in autonomous flight today. By balancing the flexibility of dynamic typing with the stability of traditional engineering, the drone industry is reaching new heights of technological sophistication.