In the intricate world of flight technology, particularly concerning unmanned aerial vehicles (UAVs) or drones, myriad principles and measurements converge to enable stable, autonomous, and precise operations. Among these, “Delta P,” or ΔP, a shorthand for pressure differential or change in pressure, stands as a fundamental concept with far-reaching implications. Far from an abstract physics term, Delta P is a cornerstone of how drones understand their environment, maintain altitude, measure airspeed, and execute complex flight maneuvers. It is the silent, pervasive force that barometric sensors and pitot tubes detect, translating environmental nuances into actionable data for the flight controller, thereby directly influencing navigation, stabilization, and overall flight performance. Understanding Delta P is not merely academic; it is key to appreciating the sophisticated sensor arrays and algorithms that define modern aerial robotics.
The Fundamental Concept of Delta P
At its core, Delta P refers to the difference in pressure between two points. This seemingly simple definition unlocks a wealth of information critical for systems operating in a fluid medium like air. In aerospace, where every force and environmental variable can impact performance, comprehending and harnessing pressure differentials is paramount.
Defining Pressure and Pressure Differential
Pressure itself is defined as force per unit area. In the context of atmospheric pressure, it’s the weight of the air column above a given point. This pressure naturally decreases with altitude. A pressure differential, or Delta P, thus quantifies how much this pressure changes from one location to another, or over a period of time at a single location. For instance, the difference in pressure between the air above a drone and the air below it, or the change in atmospheric pressure as a drone ascends or descends, are all examples of Delta P.
Consider a drone in flight. The air flowing over and under its propellers, the static air pressure at its current altitude, and the dynamic pressure created by its forward motion are all variables that create measurable pressure differences. These differentials provide critical data points that, when accurately measured and interpreted, inform the drone’s onboard systems about its state relative to its environment. Without the ability to detect these minute yet significant pressure variations, a drone would essentially be blind to one of the most fundamental aspects of its operating medium: the air itself.
Delta P in Aerodynamics and Flight Principles
The principles of aerodynamics are intrinsically linked to pressure differentials. Lift, the force that opposes gravity and keeps an aircraft in the air, is fundamentally generated by creating a pressure differential between the upper and lower surfaces of an airfoil (like a wing or propeller blade). The faster-moving air over the curved upper surface results in lower pressure, while slower-moving air beneath creates higher pressure, leading to an upward force. While drones primarily generate lift through the thrust of their propellers, the efficiency and performance of these propellers are still governed by how effectively they manipulate air pressure.
Beyond lift generation, Delta P is central to understanding drag, thrust, and airspeed. The dynamic pressure—a component of total pressure that arises from motion—is directly proportional to the square of the airspeed and air density. This relationship allows flight systems to calculate how fast an aircraft is moving through the air. Any object moving through a fluid experiences a region of higher pressure at its leading edge and lower pressure along its sides and trailing edge, creating a pressure differential that contributes to drag. Therefore, from the fundamental forces that enable flight to the nuances of aerodynamic efficiency, Delta P serves as a foundational concept that dictates how air interacts with a flying platform.
Delta P’s Crucial Role in Drone Flight Systems
The theoretical understanding of Delta P translates into practical, indispensable applications within drone flight technology. Pressure sensors, by measuring these differentials, become the eyes and ears of a drone, providing data essential for everything from maintaining a steady hover to executing precise autonomous missions.
Barometric Pressure Sensors for Altitude Hold and Stabilization
One of the most immediate and vital applications of Delta P is in altitude determination and hold. Drones are equipped with highly sensitive barometric pressure sensors, which measure the absolute atmospheric pressure at the drone’s location. As a drone ascends, the atmospheric pressure decreases, and as it descends, the pressure increases. The change in pressure over time, or ΔP/Δt, directly correlates with the drone’s vertical velocity and change in altitude.
The flight controller continuously monitors this data. By comparing the current pressure reading to a reference pressure (e.g., the pressure at takeoff or a set target altitude), the drone can precisely determine its altitude above ground level (AGL) or mean sea level (MSL), depending on calibration. This capability is critical for:
- Altitude Hold: The drone can actively adjust its motor thrust to maintain a constant barometric pressure reading, thereby holding a stable altitude even against minor updrafts or downdrafts. This is fundamental for cinematic shots, surveying, and many other applications requiring consistent height.
- Vertical Stabilization: Sudden changes in Delta P can indicate rapid vertical movement. The flight controller uses this information to damp oscillations and ensure smooth vertical flight, preventing unwanted “bouncing” or erratic altitude changes.
- Terrain Following (with other sensors): While barometric sensors provide absolute altitude, combining their Delta P data with ground-facing LiDAR or sonar sensors allows for sophisticated terrain following, adjusting altitude to maintain a constant distance from varying ground contours.
Airspeed Measurement and Pitot Tubes
While GPS provides ground speed, knowing the drone’s airspeed—its speed relative to the surrounding air mass—is equally crucial, especially in windy conditions. Here, Delta P again plays a starring role, primarily through the use of pitot tubes (or pitot-static tubes).
A pitot tube is a small instrument that measures dynamic pressure. It typically has two openings:
- Pitot Port: Faces directly into the oncoming airflow, measuring the total pressure (static pressure + dynamic pressure).
- Static Port: Located on the side, perpendicular to the airflow, measuring only the static pressure of the ambient air.
The difference between the total pressure and the static pressure is the dynamic pressure. As established earlier, dynamic pressure is directly related to airspeed.
$$Dynamic Pressure = Total Pressure – Static Pressure = frac{1}{2} rho V^2$$
where ρ is air density and V is airspeed.
By measuring this Delta P, the drone’s flight controller can accurately calculate its true airspeed. This information is vital for:
- Wind Compensation: Knowing the airspeed allows the drone to differentiate between its own motion and the effects of wind. This enables the flight controller to make appropriate adjustments to maintain desired headings and trajectories, especially in gusty conditions.
- Aerodynamic Efficiency: For fixed-wing drones, maintaining optimal airspeed is critical for maximizing flight endurance and efficiency. Delta P measurements guide the drone to fly at its most efficient speed.
- Safe Flight Envelope: Airspeed data helps the drone stay within safe operational limits, preventing stalls (too slow) or overspeeding, which could damage the airframe.

Enhancing Navigation and Waypoint Accuracy
GPS provides excellent horizontal positioning, but its vertical accuracy can sometimes be less precise, especially in challenging environments. Integrating Delta P data from barometric sensors significantly augments navigation systems:
- Vertical GPS Augmentation: Barometric altitude data, derived from Delta P, can be fused with GPS altitude readings to provide a more robust and accurate estimate of the drone’s height. This sensor fusion helps compensate for GPS drift or inaccuracies in the vertical axis.
- Waypoint Precision: For missions requiring precise altitude at specific waypoints (e.g., mapping, inspection flights), Delta P feedback ensures the drone reaches and maintains the exact programmed height, enhancing the quality and consistency of collected data.
- Relative Positioning: In scenarios where relative altitude between multiple drones or between a drone and a ground station is critical, Delta P measurements provide a localized, highly responsive reference.
How Delta P is Measured and Utilized by Drones
The practical implementation of Delta P measurement in drones involves sophisticated sensor hardware and intelligent software algorithms that translate raw sensor readings into usable flight data.
Sensor Technologies: Barometers, Pitot-Static Systems
The primary sensors responsible for measuring Delta P in drones are:
- Barometric Pressure Sensors: These are micro-electromechanical systems (MEMS) devices that typically consist of a tiny diaphragm that deflects under changing atmospheric pressure. The deflection is then converted into an electrical signal. Modern drone barometers are incredibly sensitive, capable of detecting altitude changes of less than a meter. Common types include Bosch BMP280/BME280 or Measurement Specialties MS5611. They primarily measure absolute pressure.
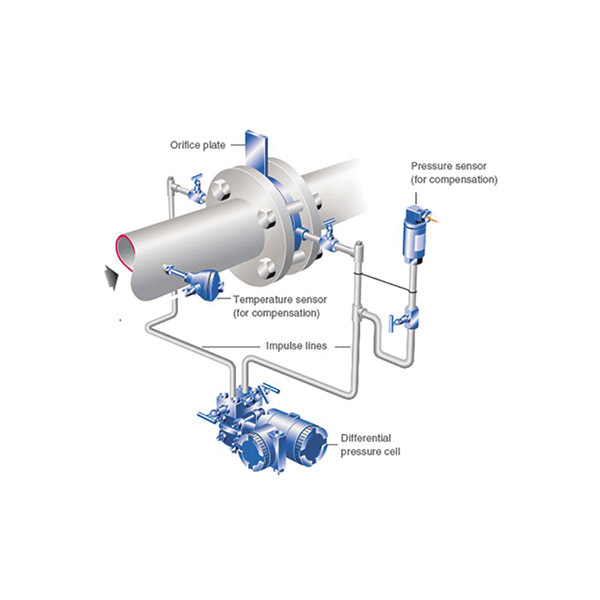
- Pitot-Static Systems: As discussed, these rely on a pitot tube and static ports to measure dynamic pressure for airspeed calculation. The differential pressure between the pitot and static ports is measured by a dedicated differential pressure sensor, often integrated with an airspeed sensor module. These are typically more common on fixed-wing drones where consistent forward airspeed is the norm, though some larger multirotors also employ them.
Data Interpretation and Flight Controller Integration
The raw electrical signals from these Delta P sensors are fed into the drone’s flight controller. Here, analog-to-digital converters (ADCs) transform the signals into digital data. This data then undergoes several layers of processing:
- Filtering: Raw sensor data is often noisy due to vibrations, temperature fluctuations, and electromagnetic interference. Kalman filters or complementary filters are commonly used to smooth out these readings, making them more reliable.
- Calibration: Sensors are calibrated to account for manufacturing variations and to provide accurate readings relative to known standards. In-flight calibration might also occur, adjusting for temperature changes that affect air density and sensor performance.
- Conversion to Physical Quantities: The filtered and calibrated pressure readings are then converted into meaningful physical quantities like altitude (using the barometric formula) and airspeed (using the dynamic pressure formula).
- Feedback Loops: These calculated altitude and airspeed values are fed into the flight controller’s Proportional-Integral-Derivative (PID) control loops. For example, if the drone needs to maintain 50 meters altitude, the PID controller uses the barometric Delta P to detect any deviation from 50 meters and commands the motors to adjust thrust to correct the altitude, bringing the Delta P reading back to the desired value.
Calibration and Environmental Factors
Accurate Delta P measurement is highly dependent on proper calibration and understanding of environmental factors.
- Temperature Compensation: Air density (ρ) changes significantly with temperature. Since density is a factor in altitude and airspeed calculations, sensors must be temperature-compensated, and the flight controller needs accurate ambient temperature readings (often from integrated temperature sensors) to correctly interpret pressure data.
- Humidity: While less impactful than temperature, high humidity can slightly alter air density, affecting barometric and airspeed readings. Advanced systems may account for this.
- Wind and Turbulence: Strong winds can create localized pressure variations around the drone, potentially affecting static pressure ports and leading to erroneous airspeed readings. Turbulent air can also introduce noise into barometric readings. Proper sensor placement and robust filtering algorithms are crucial to mitigate these effects.
Advanced Applications and Future of Delta P in UAVs
As drone technology evolves, the role of Delta P measurements continues to expand, paving the way for more sophisticated and autonomous flight capabilities.
Precision Landing and Terrain Following
Delta P contributes significantly to achieving greater precision in critical flight phases. For precision landing, especially in GPS-denied environments or on moving platforms, relative barometric altitude combined with vision-based or LiDAR sensors provides highly accurate vertical position information. The drone can precisely control its descent rate by monitoring Delta P changes, ensuring a soft and accurate touchdown. In terrain following, blending barometric altitude (absolute) with downward-looking sensor data (relative to ground) allows for robust and adaptive flight profiles that maintain optimal clearance over varying terrain, vital for mapping, inspection, and delivery services in complex landscapes.
Gust Detection and Adaptive Flight Control
Understanding Delta P can enable drones to better perceive and react to dynamic atmospheric conditions. Sudden, localized changes in air pressure can indicate wind gusts or microbursts. By rapidly detecting these Delta P variations across multiple points on the airframe (using an array of pressure sensors), a drone could potentially predict and react to gusts before they destabilize the aircraft. This “gust detection” would allow for adaptive flight control, where the drone’s control algorithms dynamically adjust thrust and control surface deflections to maintain stability and trajectory in challenging winds, significantly enhancing safety and reliability for operations in unpredictable weather.
Research and Development in Aeroacoustics and Propeller Efficiency
Beyond fundamental flight control, Delta P is becoming a critical parameter in advanced drone research.
- Aeroacoustics: The noise generated by drone propellers is largely due to pressure fluctuations. By precisely measuring Delta P around propeller blades, researchers can better understand noise generation mechanisms and design quieter, more efficient propeller geometries.
- Propeller Efficiency and Health Monitoring: Analyzing the pressure differential created by propellers can provide real-time insights into their efficiency. Deviations from expected Delta P signatures could indicate propeller damage, motor issues, or suboptimal flight conditions, allowing for predictive maintenance or immediate flight adjustments to prevent failures. This extends to monitoring the boundary layer over wings for fixed-wing drones, optimizing flow for greater lift and less drag.
Challenges and Considerations
While invaluable, relying on Delta P measurements comes with its own set of challenges that developers and pilots must consider.
Environmental Impact on Pressure Readings
Delta P readings are inherently susceptible to environmental variables beyond altitude and airspeed.
- Temperature Swings: Extreme temperature changes can affect sensor accuracy and significantly alter air density, requiring sophisticated compensation algorithms.
- Humidity: While often neglected, very high humidity can slightly decrease air density, leading to minor inaccuracies in pressure-derived calculations.
- Weather Phenomena: Rapid changes in weather, such as fronts or localized storms, can cause significant atmospheric pressure fluctuations unrelated to altitude, potentially confusing a drone’s barometric altimeter if not properly filtered or cross-referenced with other data.
Sensor Accuracy and Reliability
The quality and reliability of pressure sensors are paramount.
- Calibration Drift: Over time, sensor readings can drift, necessitating periodic recalibration or advanced self-calibration routines.
- Vibration and Noise: Drones are inherently vibrating platforms. These vibrations can introduce mechanical noise into sensitive pressure sensors, requiring robust anti-vibration mounting and digital filtering.
- Environmental Contaminants: Pitot tubes, especially, can be susceptible to blockages from ice, dust, or insects, leading to inaccurate airspeed readings. Regular inspection and potentially heated pitot tubes are necessary in certain operating environments.
Software Algorithms for Noise Reduction and Compensation
The intelligence of a drone’s flight controller lies not just in its sensors but in how it processes their data.
- Filtering Algorithms: Advanced filtering techniques (e.g., Extended Kalman Filters, Particle Filters) are crucial for fusing Delta P data with other sensor inputs (GPS, IMU, LiDAR) to provide a more accurate and robust estimate of altitude and airspeed, while minimizing the impact of noise and environmental interference.
- Dynamic Compensation: Algorithms must dynamically compensate for varying air densities (due to temperature/humidity) and aerodynamic effects (e.g., prop wash influencing static port readings) to ensure the Delta P calculations remain accurate across different flight regimes and conditions.
- Redundancy and Plausibility Checks: For safety-critical applications, multiple redundant pressure sensors might be used, with software performing plausibility checks between readings to detect and manage sensor failures or significant discrepancies.
In conclusion, Delta P is far more than a simple metric; it is a vital communication channel between a drone and its aerial environment. Its measurement, through sophisticated sensors and intelligent processing, underpins the core functions of flight technology, from basic stabilization and altitude hold to advanced navigation and adaptive flight control. As drones become more autonomous and operate in increasingly complex scenarios, the precision and reliability with which Delta P is harnessed will continue to be a driving force in the evolution of aerial robotics.