The term “Cos Pi” might initially sound like a mathematical curiosity, but within the realm of drone technology, it represents a critical component underpinning accurate navigation and sophisticated data acquisition. While not a standalone piece of hardware or a specific drone model, “Cos Pi” is a shorthand for a foundational concept in how drones understand their orientation and position relative to the Earth’s magnetic field and their own internal state. This understanding is paramount for everything from basic waypoint navigation to advanced aerial surveying and inspection tasks. To truly grasp the significance of “Cos Pi,” we must delve into its roots in physics and engineering and then explore its practical applications within the drone ecosystem.
The Mathematical Underpinnings of Orientation: Cosine and Pi
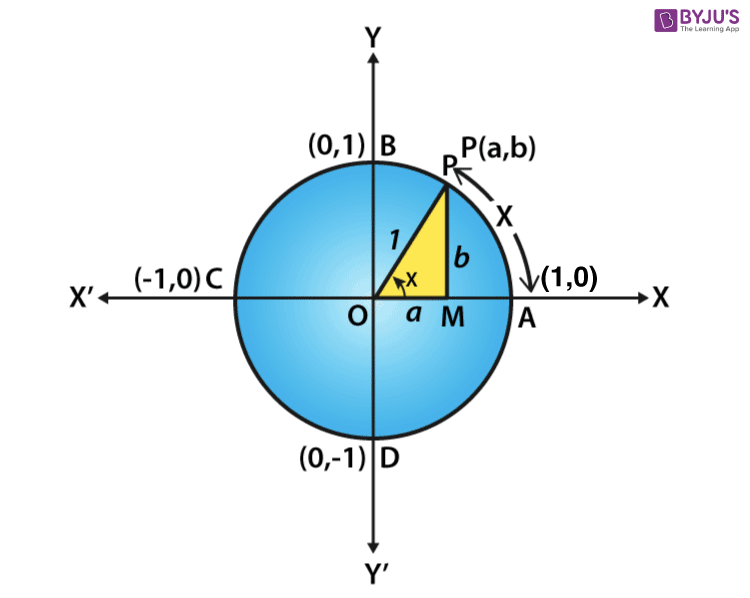
At its core, understanding “Cos Pi” requires a brief foray into trigonometry. The cosine function, a fundamental part of mathematics, relates an angle in a right-angled triangle to the ratio of the length of the adjacent side to the length of the hypotenuse. In the context of drones, this mathematical principle is applied to translate rotational movements and sensor readings into meaningful directional information.
Angles, Rotations, and the Coordinate System
Drones operate in a three-dimensional space and constantly require an accurate representation of their orientation. This orientation is typically defined by three primary axes: roll, pitch, and yaw.
- Roll: This refers to the rotation of the drone around its longitudinal axis (from nose to tail). Imagine the drone tilting left or right.
- Pitch: This is the rotation around its lateral axis (from wingtip to wingtip). This is the drone tilting forward or backward, like an airplane ascending or descending.
- Yaw: This is the rotation around its vertical axis. This is the drone turning left or right, changing its heading.
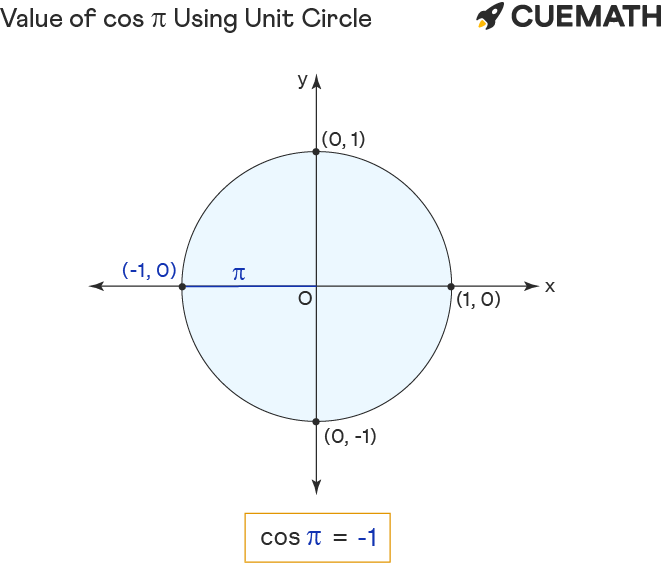
These rotations are measured in degrees or radians. Here, the concept of “Pi” ($pi$) becomes relevant. In mathematics, $pi$ is the ratio of a circle’s circumference to its diameter, approximately equal to 3.14159. A full circle represents 360 degrees, which is equivalent to $2pi$ radians. Therefore, $pi$ radians represents 180 degrees. Understanding angles in radians is crucial for many computational algorithms used in navigation and sensor processing.
The Cosine Function in Sensor Data Interpretation
Drones are equipped with a suite of sensors to determine their orientation and movement. The Inertial Measurement Unit (IMU) is a key component, typically comprising accelerometers and gyroscopes. Accelerometers measure linear acceleration, while gyroscopes measure angular velocity.
The data from these sensors, especially when measuring rotations, is often expressed as values that can be directly related to trigonometric functions. For instance, when a drone is pitched at a certain angle, the readings from its accelerometers will change in a way that can be described by the cosine of that angle. If the drone is perfectly level (0 degrees pitch), the vertical accelerometer reading might be proportional to the cosine of 0, which is 1. As the drone pitches forward or backward, the angle increases, and the cosine value decreases, affecting the sensor readings.
The term “Cos Pi” in this context often refers to a specific calculation or reference point involving the cosine of an angle that is related to $pi$ radians (180 degrees) or its fractions. This could arise in several scenarios:
- Calibration: During calibration, sensors might be rotated through specific angles, including those related to $pi$, to establish baseline readings and compensate for biases.
- Algorithm Initialization: Navigation and stabilization algorithms often require initial orientation data. Calculations involving $pi$ and cosine might be used to set these initial states or to normalize sensor inputs.
- Specific Mathematical Models: Advanced navigation systems might employ mathematical models where the cosine of angles expressed in terms of $pi$ are directly used to derive positional or orientation corrections.
Navigational Accuracy and Stabilization: The Role of Cos Pi Calculations
The precise interpretation of sensor data, often involving “Cos Pi” related calculations, is fundamental to a drone’s ability to navigate accurately and maintain stable flight. Without this, a drone would be unable to follow pre-programmed routes, hover in place, or compensate for external disturbances.
Understanding Drone Attitude and Heading
The “attitude” of a drone refers to its orientation in space – its roll, pitch, and yaw. This is primarily determined by the IMU. However, for true navigation, especially when integrating with GPS, understanding the drone’s “heading” (its direction relative to true north) is also critical.
This is where magnetic compasses, often integrated within the IMU or as separate magnetometers, come into play. Magnetometers measure the Earth’s magnetic field. However, the magnetic field at any given location is not uniform and can be influenced by the drone itself (magnetic interference from motors and electronics). Furthermore, the direction of the magnetic field vector changes with the drone’s pitch and roll.
To accurately determine the drone’s heading from magnetometer readings, complex calculations are required. These calculations often involve projecting the measured magnetic field vector onto the horizontal plane, taking into account the drone’s current pitch and roll. This projection relies heavily on trigonometric functions, including cosine, to resolve the components of the magnetic field vector.
For instance, if a drone is pitched downwards, the measured magnetic field will have a vertical component. To find the horizontal component (which indicates heading), one would need to use the cosine of the pitch angle to correct the readings. Calculations involving angles that are multiples or fractions of $pi$ are often used to ensure proper handling of these projections, especially when dealing with extreme pitch or roll angles where the drone might be inverted.
The Magic of Stabilization Systems
Drone stabilization systems are responsible for keeping the drone level and steady, even in the presence of wind or other external forces. This is achieved through a feedback loop: sensors detect deviations from the desired orientation, and the flight controller adjusts the motor speeds to counteract these deviations.
The flight controller’s algorithms are built upon a sophisticated understanding of the drone’s dynamics. This understanding is heavily reliant on accurate orientation data derived from the IMU, processed using trigonometric principles. When a gust of wind tilts the drone, the gyroscopes and accelerometers detect this change. The flight controller then uses these readings, which are inherently linked to angular changes, to calculate the necessary motor adjustments.
The cosine function plays a role in translating the raw sensor data into meaningful commands for the motors. For example, if the drone is commanded to fly forward at a specific pitch angle, the flight controller needs to know the exact angle to maintain. This is achieved by processing the accelerometer and gyroscope data, often involving calculations that use the cosine of the current pitch and roll to determine the actual orientation relative to gravity. The phrase “Cos Pi” could represent a specific scenario within these calculations, such as determining the influence of gravity when the drone is inverted (an angle related to $pi$ radians) or when calculating the horizontal component of acceleration, which is crucial for dead reckoning when GPS is unavailable.
Advanced Applications: From Mapping to Industrial Inspection
The accurate interpretation of orientation and movement, facilitated by concepts like “Cos Pi,” is not just for keeping a drone airborne; it’s fundamental to unlocking its potential for a wide range of advanced applications.
Photogrammetry and 3D Mapping
Photogrammetry is a technique that uses overlapping aerial photographs to create precise 2D or 3D representations of the Earth’s surface or structures. For this to be accurate, the drone must know the exact position and orientation of its camera at the moment each photograph was taken.
This is where the flight controller’s understanding of attitude and heading becomes critical. When a drone flies a pre-defined survey pattern, its flight path is logged, along with highly accurate information about its orientation. The GPS provides the drone’s position, but the IMU data, processed with trigonometric functions, provides the crucial orientation information (roll, pitch, yaw). This orientation data allows software to reconstruct the angle at which each photo was captured, enabling the precise triangulation needed to build accurate 3D models.
The calculations involved in determining the camera’s orientation at any given moment will inherently involve trigonometric functions. If the drone is designed to perform aggressive maneuvers or survey complex terrain, it might experience significant pitches and rolls. The algorithms responsible for calculating the camera’s pointing vector will need to correctly account for these angles, using cosine and sine functions, potentially with angles that are multiples of $pi$, to ensure the accuracy of the final 3D model.
Industrial Inspection and Infrastructure Monitoring
Drones equipped with high-resolution cameras and specialized sensors are increasingly used for inspecting critical infrastructure like bridges, power lines, wind turbines, and buildings. These inspections often require the drone to fly close to the structure, capturing detailed imagery or sensor data.
Accurate navigation and precise positioning are paramount in these scenarios. The drone needs to follow a specific flight path, often at a consistent altitude and distance from the surface being inspected. This requires precise control over its attitude and heading. If a drone is inspecting the underside of a bridge, it will be pitched downwards significantly. The flight controller needs to accurately interpret the sensor data to maintain this orientation and navigate safely.
The phrase “Cos Pi” might be relevant in algorithms that calculate the precise angle of attack or the orientation of the sensor payload relative to a target surface. For example, if a drone is programmed to maintain a constant angle of incidence between its camera and a sloped roof for optimal thermal imaging, the flight controller will be using trigonometric functions, including cosine, to ensure this angle is maintained, potentially referencing angles related to $pi$ in its internal calculations for specific operational modes.
Autonomous Flight and AI Integration
As drones become more autonomous, powered by artificial intelligence and advanced algorithms, the accuracy of their orientation and positional data becomes even more critical. AI-powered flight modes, such as object tracking, terrain following, and autonomous landing, rely on a constant stream of precise data about the drone’s state.
The ability for a drone to “see” and understand its environment, then react accordingly, is built upon its ability to know where it is and how it’s oriented. This is where robust sensor fusion – combining data from GPS, IMU, vision sensors, and other sources – becomes vital. The processing of this fused data often involves complex mathematical models and algorithms that utilize trigonometric principles.
In scenarios where a drone might need to perform a complete 180-degree roll for a specific cinematic shot or to navigate through a confined space, the precise calculation of its orientation using trigonometric functions, potentially referencing angles related to $pi$, is essential for the AI to maintain control and safety. The phrase “Cos Pi”, therefore, encapsulates the mathematical foundation that enables drones to go beyond simple flight and become intelligent agents in complex environments.
In conclusion, while “Cos Pi” may not be a term you’ll find on a drone’s spec sheet, it represents a fundamental mathematical concept that is deeply embedded within the technology that makes modern drones so capable. From the basic trigonometry that allows sensors to interpret rotation to the complex algorithms that govern navigation and stabilization, the principles encapsulated by “Cos Pi” are indispensable to the precision and intelligence of unmanned aerial vehicles today. Understanding this connection provides a deeper appreciation for the engineering marvel that is the modern drone.