In the rapidly evolving landscape of Unmanned Aerial Vehicles (UAVs), the focus has shifted from basic flight stability to sophisticated data processing and autonomous decision-making. As drones evolve into flying computers, the software architecture driving them must become more robust, scalable, and efficient. This is where “containerisation” enters the frame. While traditionally a concept rooted in cloud computing and enterprise software development, containerisation has become a cornerstone of modern tech and innovation within the drone industry. It represents a paradigm shift in how we develop, deploy, and manage the complex software stacks required for autonomous flight, remote sensing, and large-scale fleet operations.
Understanding the Concept of Containerisation for UAV Systems
To understand containerisation in the context of drone technology, one must first look at the limitations of traditional embedded software. Historically, drone firmware was “monolithic”—a single, massive block of code where the flight controller, communication protocols, and payload drivers were all intertwined. If one element needed an update, the entire system had to be re-flashed, risking stability and increasing downtime.
From Monolithic Code to Modular Architecture
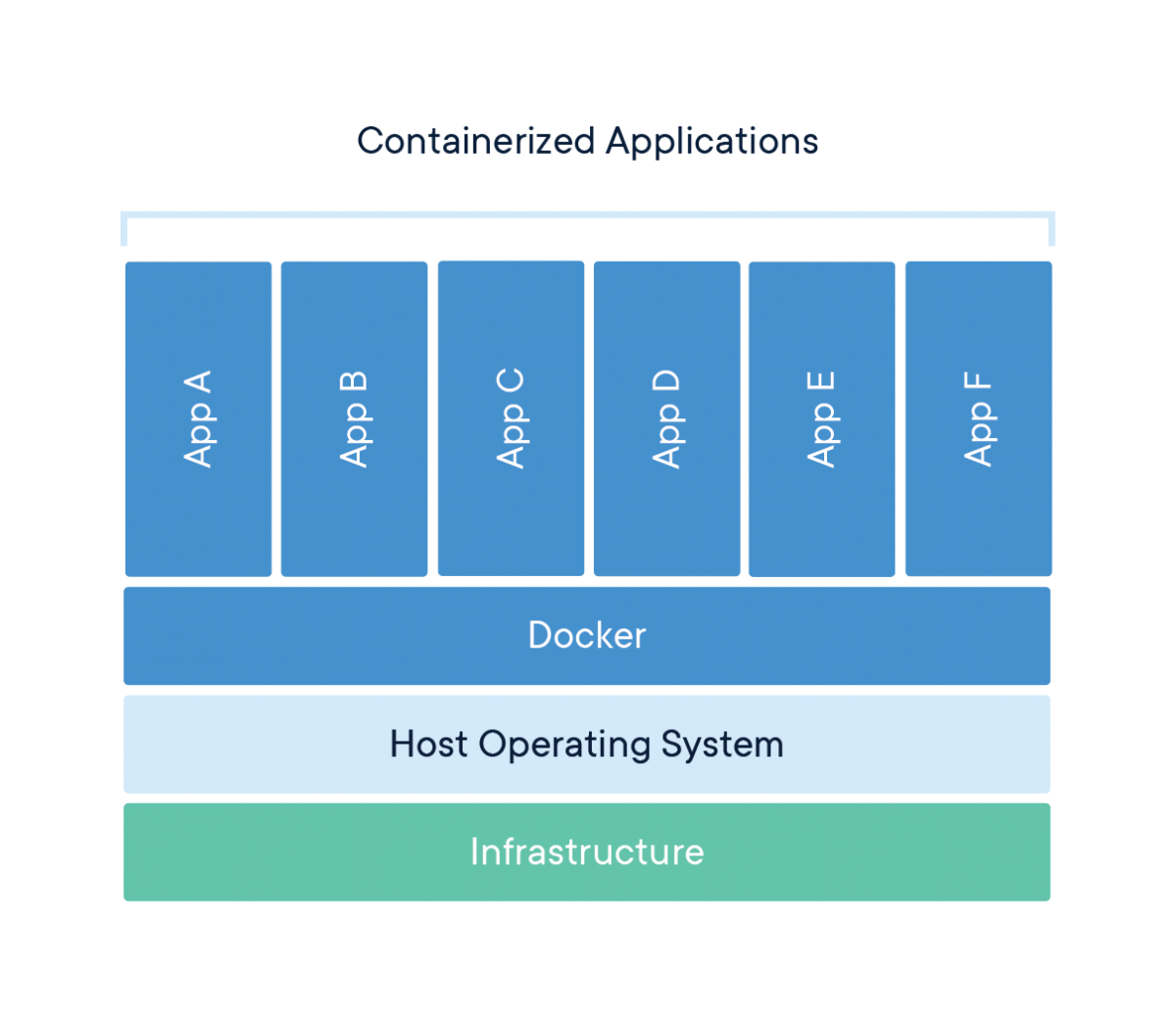
Containerisation breaks this monolith apart. In the world of tech and innovation, a “container” is a lightweight, standalone, and executable package of software that includes everything needed to run an application: code, runtime, system tools, system libraries, and settings. For a drone, this means that the software responsible for “AI Obstacle Avoidance” can exist in its own container, separate from the software handling “Thermal Image Processing.”
This modularity allows developers to isolate specific functions. If an experimental AI model for crop health analysis fails, it does so within its own container without compromising the primary flight control systems. This isolation is critical for safety-critical hardware like UAVs, where a software crash can lead to a physical crash.
How Containers Differ from Virtual Machines in Flight Hardware
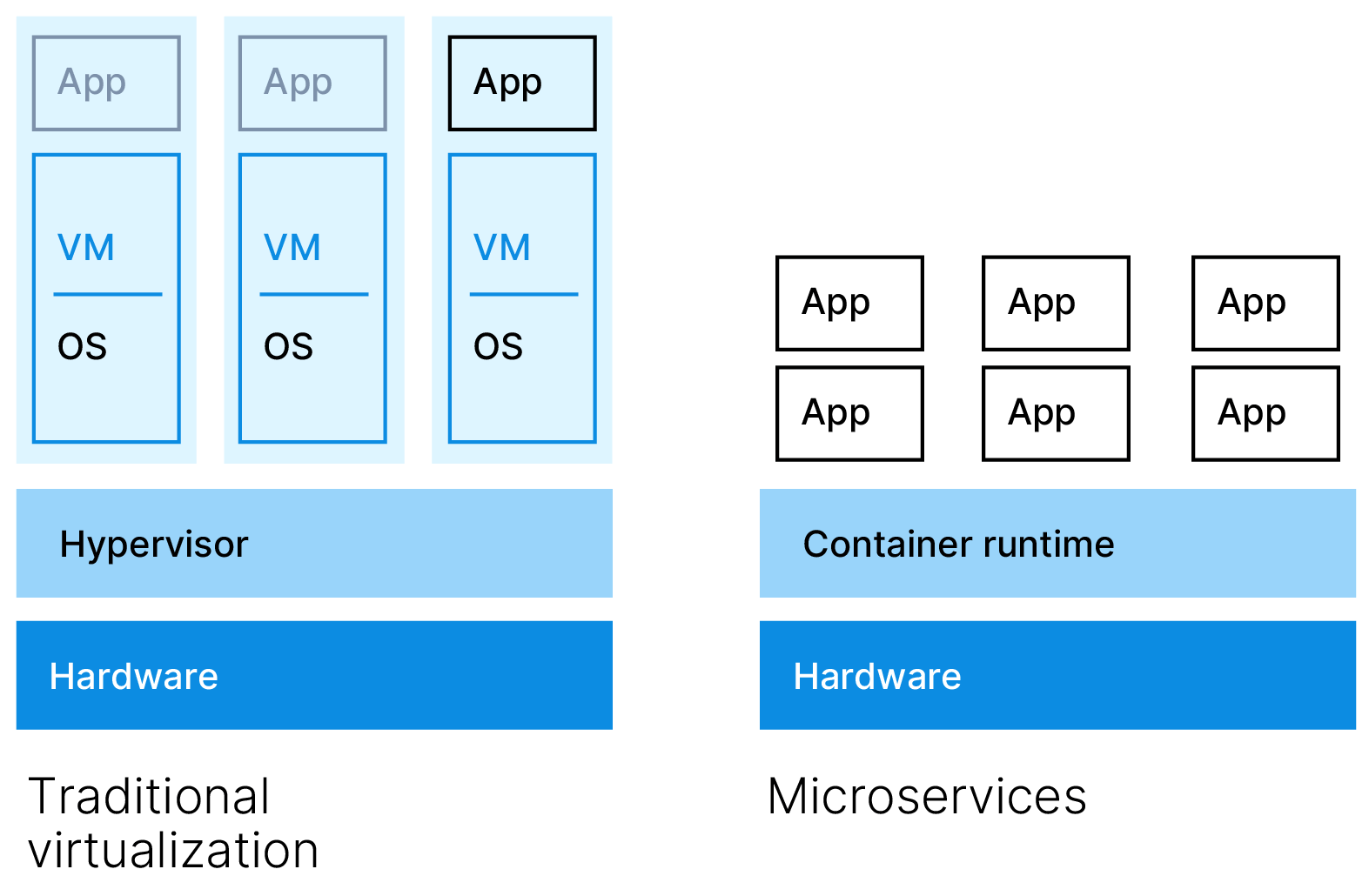
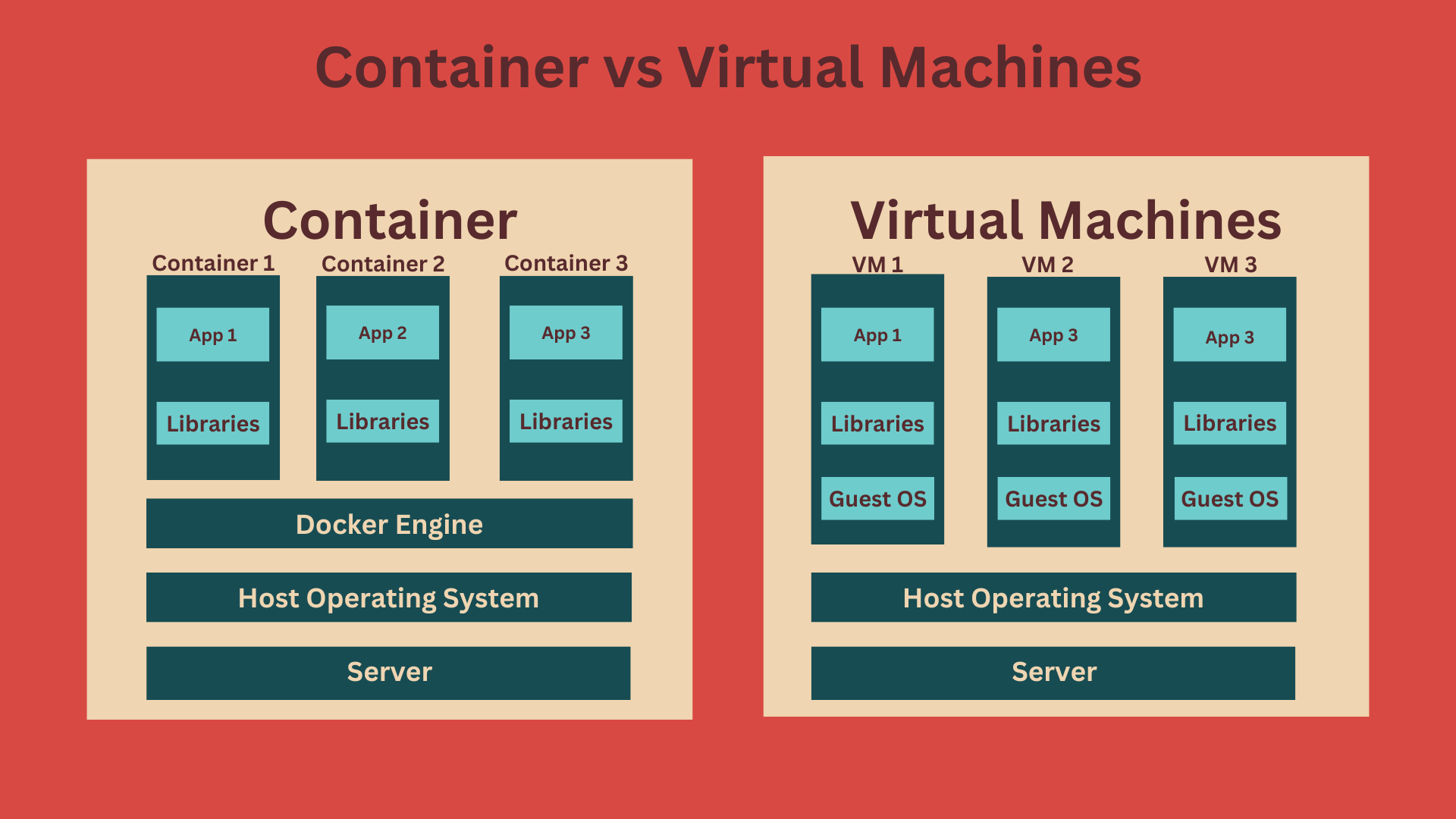
In the past, developers used Virtual Machines (VMs) to achieve isolation. However, VMs are “heavy”; they require a full guest operating system to run, which consumes significant CPU and RAM. On a drone—where every gram of weight matters and battery life is dictated by power consumption—VMs are often too resource-intensive.
Containers, by contrast, share the host system’s kernel but remain isolated from one another. This “lightweight” nature makes them perfect for the “Edge Computing” found on modern drones. Platforms like Docker or lightweight versions of Kubernetes allow high-level logic to run on onboard companion computers (such as the NVIDIA Jetson or Raspberry Pi CM4) with minimal overhead, ensuring that the drone’s processing power is used for flight and data analysis rather than managing an oversized operating system.
The Strategic Advantages of Containerisation in Remote Sensing and Mapping
The modern drone is rarely just a flying camera; it is a sophisticated sensor platform used for 3D mapping, multispectral imaging, and infrastructure inspection. Containerisation provides a streamlined workflow for these data-heavy missions.
Rapid Deployment of AI Algorithms
One of the most significant innovations in drone tech is the ability to run AI at the “edge”—meaning the data is processed on the drone in real-time rather than being sent back to a ground station. Containerisation allows specialized AI models to be “swapped” in and out of the drone’s hardware depending on the mission.
For example, a drone performing a search and rescue mission can be loaded with a containerized “Human Detection” algorithm. Once that mission is complete, the operator can push a new container for “Wildfire Perimeter Mapping” without needing to reconfigure the entire system. This agility allows a single drone hardware platform to serve multiple specialized roles with the simple push of a software update.
Enhancing Data Integrity and Portability
When drones are used for industrial mapping, the consistency of data is paramount. Containerisation ensures “environmental parity.” This means the software environment used by the developer to create a mapping algorithm is identical to the environment running on the drone’s onboard computer.
By eliminating the “it works on my machine” problem, tech innovators can ensure that photogrammetry engines or LiDAR processing scripts function exactly as intended, regardless of the drone’s underlying firmware version. This consistency reduces errors in data collection and ensures that the 3D models generated from drone flights are accurate and reproducible.
Enabling Autonomous Flight through Microservices
As we move toward a future of Beyond Visual Line of Sight (BVLOS) operations and fully autonomous flight, the complexity of drone software grows exponentially. Containerisation enables a “microservices” approach to flight, where different aspects of autonomy are handled by independent, communicating containers.
Scalability in Drone Swarm Operations
Managing a single drone is a challenge; managing a swarm of fifty is a logistical hurdle. Containerisation is the “secret sauce” behind modern swarm coordination. Through container orchestration, a central command system can deploy specific tasks to different drones within a swarm. Some drones might be tasked with communication relay containers, while others run specialized sensor containers.
Because containers are easily replicable, scaling a fleet becomes a matter of software deployment rather than manual configuration. If a mission requires more “eyes on the target,” additional drones can be brought online, each automatically pulling the necessary software containers from a centralized registry (like a private Docker Hub) as soon as they boot up.
Real-Time Updates Without Grounding the Fleet
In traditional drone tech, a “firmware update” often means grounding the entire fleet for hours of testing and installation. With a containerized approach, developers can push “Over-the-Air” (OTA) updates to specific microservices while the drone is operational or sitting on a charging pad.
If a bug is found in the “GPS Filtering” logic, only that specific container needs to be updated. This “Rolling Update” capability ensures that the drone fleet is always running the most secure and efficient code, maximizing uptime and ensuring that innovation is delivered to the field in days rather than months.
Overcoming Challenges: Security and Resource Constraints
While containerisation offers immense benefits, its application in drone technology requires careful management of security and hardware limitations.
Hardening the Drone Software Ecosystem
Drones are increasingly targets for cyber-attacks, especially in military or sensitive industrial applications. Containerisation provides a layer of security through “sandboxing.” Since each application runs in its own isolated container, a vulnerability in a third-party camera app is less likely to grant an attacker access to the flight controller or the drone’s telemetry data.
Furthermore, tech innovators are now using “signed containers” to ensure that only authorized software can run on the drone. This prevents “malicious payload” injection, where unauthorized code could be used to hijack a drone’s flight path or steal sensitive aerial imagery.
Optimizing Performance for Low-Power Onboard Computers
The primary challenge of containerisation on drones is the “resource tax.” Even though containers are lighter than VMs, they still require a container engine to run. In the world of micro-drones or racing drones, where every millisecond of latency and every milliamp of battery counts, containerisation is often seen as overkill.
However, for the “Tech & Innovation” sector—focused on enterprise-grade autonomous drones—the trade-off is increasingly worth it. Advances in “distroless” containers (which contain only the application and its immediate dependencies) have reduced the footprint of containerized drone software to just a few megabytes. This allows even mid-tier drones to reap the benefits of modular software without significant hits to flight time.
The Path Forward: Kubernetes at the Edge
The ultimate evolution of containerisation in the drone industry is the implementation of “Kubernetes at the Edge.” Kubernetes is an orchestration platform that manages the lifecycle of containers, ensuring they stay running and scaling them as needed.
Orchestrating the Next Generation of Autonomous Logistics
For the future of drone delivery and autonomous logistics, Kubernetes-based containerisation will be essential. Imagine a “drone port” where hundreds of delivery UAVs land, recharge, and take off. A centralized orchestration system could manage the software on every drone in real-time—loading “Weight Calculation” containers for heavy lift missions or “Noise Abatement” containers for flights over residential areas.
By treating a fleet of drones as a distributed cluster of computers, we move away from seeing the drone as a “tool” and begin seeing it as a “node” in a larger, intelligent network. This is the heart of tech innovation in the 2020s: the fusion of aerospace engineering with the agility of modern software development.
Conclusion
Containerisation is more than just a buzzword; it is the fundamental architecture that will allow drones to reach their full potential as autonomous, intelligent agents. By providing a modular, secure, and scalable way to manage software, containerisation solves the most pressing challenges of modern UAV development. As the industry continues to push the boundaries of what is possible with AI, remote sensing, and autonomous flight, the ability to “package” intelligence into containers will be the key to turning experimental drone tech into reliable, everyday infrastructure. The “flying computer” has arrived, and it is powered by containers.