In the rapidly evolving landscape of autonomous technology, while much attention is rightly given to the aerial prowess of drones and advanced flight systems, the foundational principles of ground mobility remain critically important. For any system that navigates on wheels, from sophisticated Unmanned Ground Vehicles (UGVs) to specialized drone landing gear or deployable ground modules, a seemingly simple geometric concept known as caster angle plays a profound role in stability, steering, and overall operational efficiency. This principle, deeply rooted in automotive engineering, translates directly to enhancing the performance and reliability of autonomous ground-based robotics and hybrid drone systems within the broader “Tech & Innovation” ecosystem. Understanding caster angle is not merely about mechanical design; it’s about optimizing the interaction between an autonomous system and its environment, ensuring predictable behavior and precise control, which are paramount for successful missions ranging from mapping and remote sensing to logistics and inspection.
The Fundamentals of Caster Angle in Mobility Design
At its core, caster angle describes the angular displacement of a steering or suspension pivot axis from the vertical, when viewed from the side of a vehicle. This seemingly minor detail has a massive impact on how a wheeled system tracks, steers, and maintains stability, especially when operating autonomously. The geometry is intentionally designed to produce specific handling characteristics, crucial for any robotic platform required to move reliably on the ground.
Defining Positive, Negative, and Zero Caster
The concept of caster is best understood by visualizing the steering axis – the imaginary line through the upper and lower pivot points around which the wheel turns.
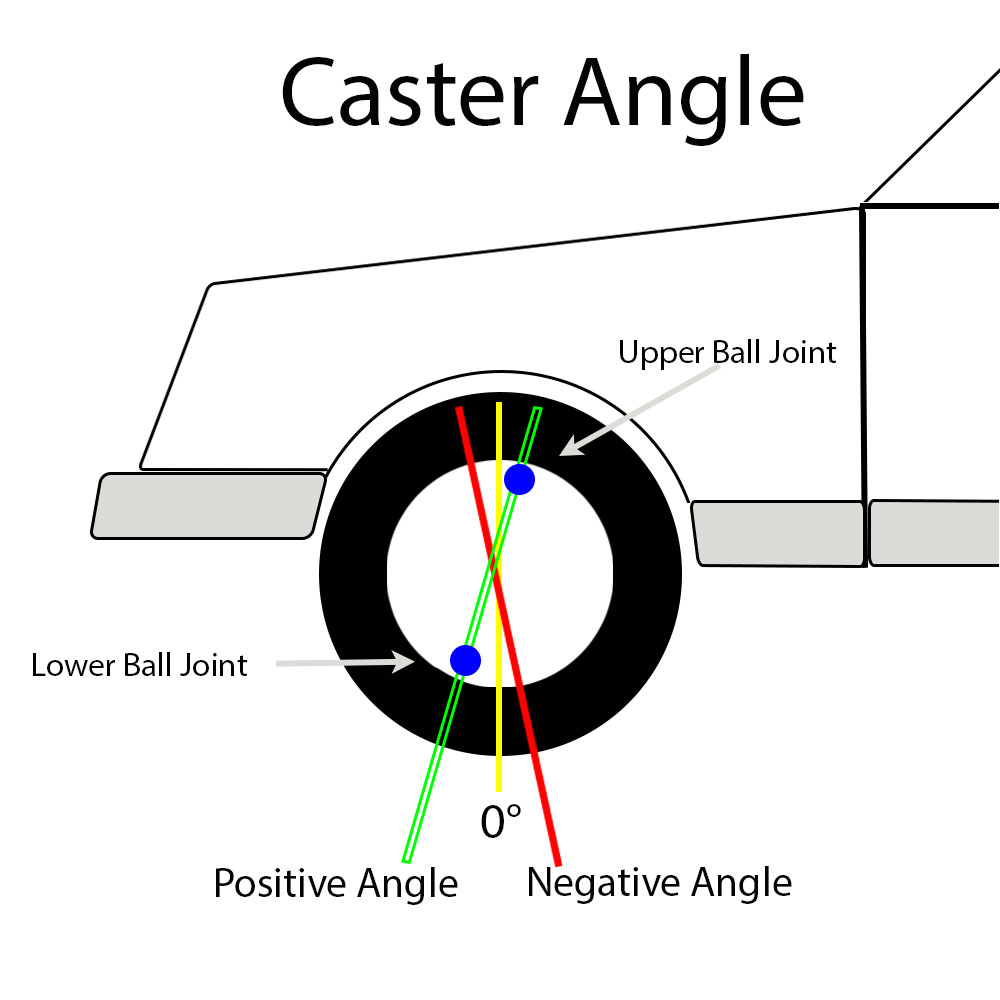
- Positive Caster: This is the most common and desirable configuration for stability. With positive caster, the top of the steering axis is tilted rearward, towards the back of the vehicle, relative to the bottom pivot point. When viewed from the side, the steering axis leans back. This arrangement creates a “trailing” effect, where the point of contact between the tire and the ground trails behind the steering axis. This trailing distance is what gives positive caster its characteristic self-centering tendency.
- Negative Caster: In contrast, negative caster means the top of the steering axis is tilted forward, towards the front of the vehicle. The point of contact between the tire and the ground would lead the steering axis. This configuration is rare in systems prioritizing stability, as it tends to make steering light and unpredictable, actively working against self-centering forces.
- Zero Caster: Zero caster means the steering axis is perfectly vertical, with no forward or backward tilt. In this scenario, the tire’s contact point aligns directly with the steering axis. While offering very light steering, it lacks the inherent directional stability provided by positive caster, requiring constant active correction from the control system to maintain a straight path.
The Self-Centering Phenomenon and Directional Stability
The primary benefit of positive caster angle is its ability to induce a self-centering force in the wheels. Imagine a shopping cart wheel: it naturally swivels to trail behind the direction of travel, keeping the cart moving straight. This is an example of a caster effect. In engineered systems, positive caster achieves this through two main mechanisms:
Firstly, as the wheel turns from a straight-ahead position, the vehicle’s weight acting through the steering axis actually lifts the vehicle slightly. Gravity then pulls the vehicle back down, naturally forcing the wheel to return to the straight-ahead, lowest-energy position. This creates a powerful self-centering torque.
Secondly, the “trail” effect – where the tire’s ground contact point trails behind the steering axis intersection point – generates a stabilizing moment. When the wheel is turned, this trail acts like a lever, creating a force that pushes the wheel back towards the straight-ahead position. This intrinsic stability significantly reduces the workload on an autonomous system’s steering actuators and control algorithms, allowing it to maintain a straight line with minimal input and enhancing overall directional accuracy. For UGVs navigating complex terrains or executing precise mapping patterns, this passive stability is invaluable.
Impact on Autonomous Navigation and Maneuverability
The intelligent application of caster angle is pivotal for autonomous ground systems, directly influencing their ability to navigate accurately, maintain stability, and execute precise maneuvers. Its effects are not merely mechanical but have profound implications for software and sensor integration.
Enhancing Straight-Line Tracking for UGVs and Drone Platforms
For autonomous systems, consistent straight-line tracking is often a fundamental requirement. Whether a UGV is traversing a long-distance route for delivery, conducting line-by-line agricultural scanning, or a ground-based drone module is moving into position for a precise deployment, the ability to hold a heading without constant, minor steering adjustments is critical. Positive caster angle inherently provides this capability. By generating a passive self-centering force, it allows the wheels to naturally align with the direction of travel, minimizing deviations caused by road imperfections, crosswinds (for lighter vehicles), or minor inaccuracies in motor control. This translates to:
- Improved Efficiency: Less energy is expended on continuous steering corrections, leading to longer operational times for battery-powered systems.
- Enhanced Accuracy: Autonomous mapping, remote sensing, and data collection missions require platforms to follow predefined paths with high precision. Caster angle contributes to this by reducing “wander” and improving the repeatability of movements.
- Reduced Control System Complexity: While advanced algorithms can compensate for a lack of caster, having inherent mechanical stability simplifies the control loop, potentially leading to more robust and less resource-intensive software.
Steering Response and Precision in Robotic Systems
While positive caster enhances straight-line stability, it also affects steering response and the effort required to turn. This presents a classic engineering trade-off that must be carefully balanced for different autonomous applications.
- Heavier Steering with More Positive Caster: A higher degree of positive caster means a stronger self-centering force. While excellent for stability, it also means more torque is required from the steering actuators to initiate and maintain a turn. For larger, heavier UGVs or those operating at higher speeds, this might be acceptable.
- Lighter Steering with Less Positive Caster: Reducing positive caster makes steering lighter and more responsive. This can be beneficial for robotic platforms that require very tight turns, high agility in confined spaces, or very quick changes in direction. However, this comes at the cost of reduced straight-line stability, necessitating more active steering control from the autonomous system.
- Precision Maneuvering: For applications like robotic inspection or manipulation that require fine, precise movements, the chosen caster angle must complement the overall control system. A balance is often sought where stability is maintained, but steering effort doesn’t overwhelm the available motor power or impede desired agility. Some advanced systems might even incorporate variable caster angles (though complex) to dynamically adjust between stability and maneuverability based on the mission phase.
Advanced Applications and Considerations in Drone-Related Tech
While traditionally associated with automobiles, the principles of caster angle find novel and critical applications in the evolving world of drone technology, particularly as systems become more integrated and versatile.
Hybrid Drone-UGV Systems and Deployable Ground Modules
The future of autonomous operations often lies in hybrid systems that combine the aerial capabilities of drones with the ground mobility of UGVs. In such scenarios, caster angle becomes directly relevant to the ground component:
- Drone Landing and Take-off Platforms: Imagine larger drones that land on mobile ground platforms for recharging, payload exchange, or even mobile launch. The stability and precise positioning of these ground platforms, especially if they are designed to move or reposition autonomously, depend on optimized caster angles in their wheeled chassis.
- Drone-Deployed Ground Robots: Drones can deploy smaller ground robots for tasks too risky or impractical for the drone itself (e.g., entering confined spaces, inspecting pipelines, or carrying heavy sensors). These ground robots, often miniature UGVs, critically rely on caster angle for their directional stability and ability to navigate obstacles or uneven terrain post-deployment.
- Autonomous Material Handling: Drones might transport materials to a designated ground area, where an autonomous wheeled module takes over for last-mile delivery. The reliability and precision of this ground module’s movement are directly influenced by its caster geometry, ensuring packages arrive safely and on target.
Optimizing Caster for Specific Autonomous Missions
The “ideal” caster angle is not universal; it’s highly dependent on the specific mission profile and operational environment of the autonomous system. Engineers must carefully optimize this parameter during the design phase:
- High-Speed Ground Transit: For UGVs designed for rapid movement over relatively smooth surfaces (e.g., autonomous delivery vehicles on paved roads), a higher positive caster angle would be preferred. This maximizes straight-line stability, minimizes steering corrections, and contributes to energy efficiency at speed.
- Tight-Space Maneuverability: In environments requiring intricate turns, such as indoor inspection robots navigating factory floors or warehouse automation systems, a lower positive caster or even zero caster might be considered. This reduces steering effort and allows for tighter turning radii, albeit at the expense of some passive straight-line stability. The autonomous control system would then bear more responsibility for maintaining direction.
- Rough Terrain Navigation: For UGVs or drone-attached ground modules operating on uneven, off-road terrain, caster angle interacts complexly with suspension design. A robust suspension is needed to absorb shocks, but the caster angle ensures that even when encountering bumps or dips, the wheels tend to realign correctly. Excessive positive caster can sometimes hinder maneuverability on very rough ground by making steering too heavy, so a careful balance is crucial.
- Payload and Weight Distribution: The caster angle’s effectiveness is also influenced by the vehicle’s weight and weight distribution. Autonomous systems designed to carry variable payloads (e.g., inspection equipment, delivery items) must account for how these changes might affect the effective caster performance, potentially requiring adaptive suspension systems or intelligent control adjustments.
The Engineering Challenges and Future of Caster Angle in Autonomous Tech
As autonomous systems become more sophisticated, the integration of fundamental mechanical principles like caster angle with advanced technologies presents both challenges and opportunities for innovation.
Integration with AI and Sensor Fusion
Modern autonomous systems are characterized by their reliance on artificial intelligence (AI) and sophisticated sensor fusion for perception, decision-making, and control. Caster angle, while a mechanical feature, plays a supportive role in this complex ecosystem:
- Complementing Active Control: Instead of replacing the need for AI-driven steering, a well-designed caster angle complements it. It provides a baseline of passive stability, allowing AI algorithms to focus on higher-level tasks like path planning, obstacle avoidance, and mission optimization, rather than constantly micro-managing basic directional stability.
- Enhanced Sensor Data Interpretation: When a ground robot has stable, predictable tracking thanks to optimized caster, sensor data (from LiDAR, cameras, IMUs) regarding its position and orientation becomes more consistent and easier for AI to interpret. This leads to more reliable navigation and mapping.
- Predictive Modeling: Understanding the mechanical behavior imparted by caster angle allows AI models to more accurately predict vehicle dynamics, aiding in robust control system design and simulation.
Material Science and Lightweighting for Mobility Systems
The drive for efficiency and extended operational range in autonomous systems, especially those deployed or assisted by drones, places a premium on lightweight yet durable designs. Material science directly impacts the performance and viability of systems incorporating caster angle:
- Structural Integrity: For caster angle to perform optimally, the steering and suspension components must maintain their precise geometry under load and stress. Advanced lightweight alloys, composites, and additively manufactured (3D-printed) parts can achieve this without adding unnecessary weight, which is critical for drone-carried ground modules or energy-sensitive UGVs.
- Reduced Inertia: Lighter wheels and steering components reduce rotational inertia, making steering more responsive and efficient. This indirectly enhances the perceived effect of the caster angle on maneuverability.
- Durability in Harsh Environments: Autonomous ground systems often operate in challenging conditions. The choice of materials for elements crucial to caster geometry must resist corrosion, abrasion, and fatigue, ensuring the system maintains its intended performance over its lifespan.
In conclusion, while “caster angle” may sound like a concept firmly rooted in traditional automotive engineering, its fundamental principles of directional stability and steering dynamics are indispensable for the next generation of autonomous ground systems and integrated drone technologies. As we push the boundaries of “Tech & Innovation,” understanding and expertly applying caster angle in the design of UGVs, drone landing gear, deployable robots, and hybrid systems will be crucial for achieving the precision, reliability, and efficiency required for future autonomous missions across diverse industries. It serves as a reminder that even in the age of AI and advanced robotics, elegant mechanical design remains a cornerstone of robust technological advancement.