In the rapidly evolving landscape of modern technology, where interconnected systems and autonomous machines are becoming the norm, robust and reliable communication protocols are the bedrock of innovation. Among these, the Controller Area Network (CAN) bus stands out as a ubiquitous and highly respected standard, particularly within automotive, industrial automation, and increasingly, advanced robotics and drone systems. At the heart of this resilient communication framework lies the CAN controller—a critical component that orchestrates data exchange, ensuring seamless and error-free operation across diverse devices.
To truly appreciate the technological advancements in areas like autonomous flight, intelligent sensing, and AI-driven systems, it’s essential to understand the fundamental building blocks that enable them. The CAN controller is more than just a chip; it’s the gateway to efficient, decentralized, and highly dependable inter-device communication, crucial for the sophisticated and often safety-critical applications we see in today’s most innovative technologies.
The Foundation of Robust Communication: Understanding CAN Bus
Before diving into the specifics of a CAN controller, it’s imperative to grasp the ecosystem it operates within: the CAN bus. Developed by Bosch in the 1980s for automotive applications, the CAN bus was designed to solve the problem of complex, point-to-point wiring harnesses that plagued early electronic control units (ECUs) in vehicles. Its core principle is to allow multiple ECUs to communicate with each other over a single pair of wires, drastically reducing complexity, cost, and weight.
A Brief History and Purpose
The advent of electronics in vehicles led to an explosion of sensors, actuators, and microcontrollers, each performing specialized tasks—from engine management and anti-lock brakes to power windows and climate control. Initially, these components communicated via direct wiring, creating a spaghetti of cables. The CAN bus revolutionized this by introducing a serial communication protocol that allowed all these devices to share information on a common bus. Its primary purpose was to provide a robust, message-based communication system capable of operating in noisy environments and handling critical, real-time data efficiently. This initial success laid the groundwork for its expansion into industrial automation, medical devices, and, pertinently, the cutting-edge field of robotics and advanced drone technology.
![]()
Decentralized Control: How it Works
Unlike traditional host-centric communication networks, the CAN bus operates on a decentralized, multi-master principle. This means there isn’t a single master device controlling all communication; instead, every node (device) on the bus can initiate communication. When a node wants to transmit data, it broadcasts a message onto the bus. All other nodes then “listen” to the message. Each message contains an identifier, which not only specifies the message’s content and priority but also determines whether a listening node should process or disregard it.
A crucial aspect of CAN is its arbitration mechanism. If multiple nodes attempt to transmit simultaneously, a non-destructive bit-wise arbitration process determines which message has higher priority (a lower identifier value signifies higher priority). The node with the highest priority continues transmitting without interruption, while lower-priority nodes automatically back off and retry later. This ensures that critical messages are delivered promptly, a feature absolutely vital for systems requiring real-time responsiveness and high reliability, such as flight stabilization in drones or critical motor control in robotics.
The Role of the CAN Controller Chip
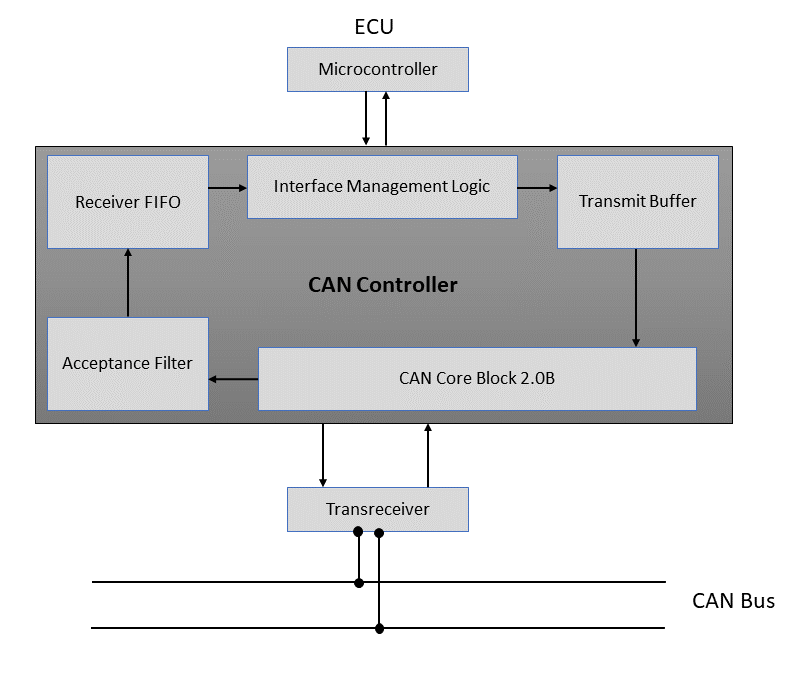
The CAN controller is the dedicated hardware component that implements the CAN protocol. It acts as an interface between the host microcontroller (which runs the application logic) and the physical CAN bus lines. Without a CAN controller, a microcontroller would not be able to effectively send or receive CAN messages.
Interfacing with the Microcontroller
A typical CAN controller chip consists of two main parts: the CAN protocol controller and the CAN transceiver. The protocol controller handles the complex rules of the CAN protocol, such as message framing, arbitration, error detection, and retransmission. It interfaces with the host microcontroller via a standard peripheral interface like SPI (Serial Peripheral Interface) or parallel bus, abstracting away the intricacies of bus communication. The microcontroller simply passes the data it wants to send to the CAN controller, which then formats it into a CAN message and transmits it. Similarly, the CAN controller receives incoming messages, filters them, and presents the relevant data to the microcontroller.

The CAN transceiver, on the other hand, is responsible for converting the digital signals from the CAN protocol controller into physical differential signals suitable for transmission over the CAN bus wiring, and vice-versa. It provides the necessary voltage levels and impedance matching for robust communication in electrically noisy environments. This separation of concerns—protocol handling by the controller and physical layer interface by the transceiver—contributes significantly to the robustness and reliability of the CAN system.
Message Filtering and Prioritization
One of the key functionalities of the CAN controller is its ability to perform message filtering. Since all nodes on the bus receive every message, it would be inefficient for the host microcontroller to process every single one. The CAN controller includes hardware filters that can be programmed to accept only messages with specific identifiers. This dramatically reduces the processing overhead on the host microcontroller, allowing it to focus on its application-specific tasks.
Furthermore, as mentioned in the arbitration process, the CAN controller manages the prioritization of messages. It handles the low-level arbitration logic, ensuring that higher-priority messages gain access to the bus even if multiple nodes are attempting to transmit simultaneously. This deterministic behavior is crucial for real-time systems where the timely delivery of critical data can impact performance and safety.
Error Detection and Fault Confinement
CAN’s reputation for robustness is largely due to its sophisticated error detection and fault confinement mechanisms, all managed by the CAN controller. It employs various error checks, including:
- CRC (Cyclic Redundancy Check): Detects data corruption.
- Bit Monitoring: Checks if the transmitted bit matches the received bit.
- Bit Stuffing: Ensures enough transitions for synchronization, detecting long sequences of identical bits.
- Frame Check: Verifies the structure of the CAN message frame.
- Acknowledgement Error: Confirms that at least one other node correctly received the message.
If an error is detected, the CAN controller immediately signals an error frame, causing all other nodes to invalidate the current message and the transmitting node to retransmit. This aggressive error handling ensures data integrity. Moreover, CAN controllers implement a fault confinement mechanism where nodes that frequently generate errors are progressively isolated from the bus (e.g., transitioning from “error active” to “error passive” to “bus off”). This prevents a single faulty node from disrupting the entire network, a vital feature for critical applications like autonomous vehicle control or complex drone operations.
Why CAN Excels: Key Advantages and Features
The enduring popularity and increasing adoption of CAN across diverse industries are testament to its inherent advantages that align perfectly with the demands of advanced technological innovation.
Reliability and Robustness
CAN’s differential signaling over twisted pair wires makes it highly resistant to electromagnetic interference (EMI), a common problem in electrically noisy environments found in industrial settings, vehicles, and propulsion systems of drones. The robust error detection and fault confinement features, handled automatically by the CAN controller, ensure message integrity and network availability even in the presence of faults. This unparalleled reliability is paramount for safety-critical systems where data loss or corruption could have catastrophic consequences.
Flexibility and Scalability
A CAN network is incredibly flexible. Nodes can be added or removed from the bus with relative ease, as long as the network termination is correctly maintained, without requiring changes to the hardware or software of other nodes. The message-based arbitration system allows for seamless integration of new functionalities. This scalability makes CAN an ideal choice for complex systems that evolve over time, such as modular drone platforms where new sensors, payloads, or propulsion systems might be integrated.
Efficiency in Data Exchange
While CAN is not the fastest bus (typical speeds range from 125 kbit/s to 1 Mbit/s for CAN 2.0B, and up to 5 Mbit/s for CAN FD), its efficiency in transmitting small packets of control-oriented data is exceptional. The short message frames (up to 8 bytes of data) and high priority for critical messages ensure minimal latency for essential control commands. This is particularly advantageous in real-time control applications where timely execution of commands is more important than raw data throughput, such as controlling multiple ESCs (Electronic Speed Controllers) in a drone or coordinating robot arm movements.
CAN in the Age of Intelligent Machines: Applications in Robotics and Drones
The attributes of CAN—reliability, real-time capability, and fault tolerance—make it an increasingly attractive choice for cutting-edge applications in robotics and, particularly, intelligent drone systems. As these systems grow in complexity and autonomy, the need for a robust inter-component communication fabric becomes paramount.
Autonomous Flight Systems
Modern autonomous drones are sophisticated machines integrating numerous subsystems: flight controllers, GPS modules, inertial measurement units (IMUs), vision sensors, LiDAR, obstacle avoidance systems, and more. Each of these components generates and requires data to enable autonomous navigation, precise positioning, and intelligent decision-making. CAN bus provides a reliable backbone for this internal communication. For instance, high-priority messages related to flight stability or emergency maneuvers can be guaranteed quick delivery, overriding less critical data. This ensures the drone’s flight controller receives accurate and timely information from all sensors, crucial for safe and stable autonomous operation, especially in complex environments or during high-speed flight.
Advanced Payload Integration
As drones move beyond simple aerial photography to complex industrial applications like inspection, mapping, and delivery, the integration of diverse and intelligent payloads becomes critical. These payloads—such as high-resolution thermal cameras, multispectral sensors, robotic grippers, or delivery mechanisms—often have their own microcontrollers and require reliable communication with the main flight controller. CAN bus offers a standardized, robust interface for these payloads, enabling them to communicate their status, receive commands, and exchange data efficiently. For example, a gimbal controller on a mapping drone could use CAN to report its orientation and receive commands for precise pointing, while also sharing data with the flight controller for geo-tagging.
Smart Battery Management and ESCs
Intelligent battery management systems (BMS) in drones use CAN to communicate critical information like cell voltage, temperature, current draw, and state of charge directly to the flight controller and even to ground control stations. This allows for more precise power management, predictive maintenance, and enhanced flight safety by providing real-time insights into the power source. Similarly, advanced Electronic Speed Controllers (ESCs) for brushless motors are increasingly incorporating CAN interfaces. This allows for bi-directional communication, enabling the flight controller to not only send precise motor commands but also receive telemetry data (RPM, current, temperature) back from each ESC. This level of granular control and feedback is essential for optimizing propulsion efficiency, implementing advanced motor control algorithms, and diagnosing potential issues in multi-rotor systems.
Future Prospects: Evolving with Advanced Tech
The CAN protocol and its controllers continue to evolve, adapting to the ever-increasing demands of data throughput and complexity in next-generation technologies.
CAN FD and Beyond
The introduction of CAN Flexible Data-rate (CAN FD) significantly enhanced the protocol’s capabilities. While retaining full backward compatibility with classic CAN, CAN FD allows for higher data rates (up to 5 Mbit/s during the data phase) and increased data payload (from 8 bytes to 64 bytes per message). This expansion addresses the growing need for more data-rich communication in advanced automotive systems, but also holds immense promise for robotics and drones requiring higher bandwidth for sensor fusion, complex decision-making, and sophisticated control algorithms. Further developments, such as CAN XL, aim to push data rates even higher and support Ethernet-like capabilities, blurring the lines between traditional fieldbuses and high-speed networks.
Standardization and Interoperability
The global standardization of CAN, overseen by ISO 11898, ensures interoperability between components from different manufacturers. This is a significant advantage for innovators in robotics and drone technology, allowing them to mix and match hardware components with confidence in their ability to communicate effectively. As the ecosystem of autonomous systems expands, the continued adherence to and evolution of CAN standards will be crucial for fostering innovation, enabling modular designs, and accelerating development cycles across the industry. The CAN controller, as the guardian of this standard, will remain a pivotal element in enabling the complex, interconnected, and intelligent machines of the future.
In conclusion, the CAN controller is far more than a simple communication interface; it is a sophisticated piece of technology that underpins the reliability, robustness, and real-time capability of countless embedded systems. As we push the boundaries of autonomous flight, advanced robotics, and intelligent automation, the foundational principles and continuous evolution of the CAN controller ensure that these innovations are built upon a secure, efficient, and dependable communication fabric, propelling us towards an even more interconnected and intelligent technological future.