In the rapidly evolving landscape of unmanned aerial vehicles (UAVs), the focus often shifts toward aerodynamics, battery density, or sensor resolution. However, beneath the carbon fiber shells and sophisticated gimbal assemblies lies a complex computational architecture that governs every millisecond of flight. Central to this architecture is the concept of “caches.” While the term is frequently encountered in the context of web browsers or personal computers, its role in drone technology and innovation is pivotal. Caches are specialized, high-speed storage layers that hold temporary data, allowing the drone’s various processors to access critical information far faster than would be possible from primary storage or remote servers.

In the realm of autonomous flight, remote sensing, and AI-driven navigation, caches are the silent enablers of real-time performance. They bridge the gap between the staggering speed of modern microprocessors and the relatively sluggish pace of data retrieval from SD cards, internal flash memory, or cloud-based telemetry. Without efficient caching mechanisms, the dream of instantaneous obstacle avoidance and fluid AI tracking would remain tethered by the bottleneck of data latency.
The Fundamental Role of Caching in Autonomous Systems
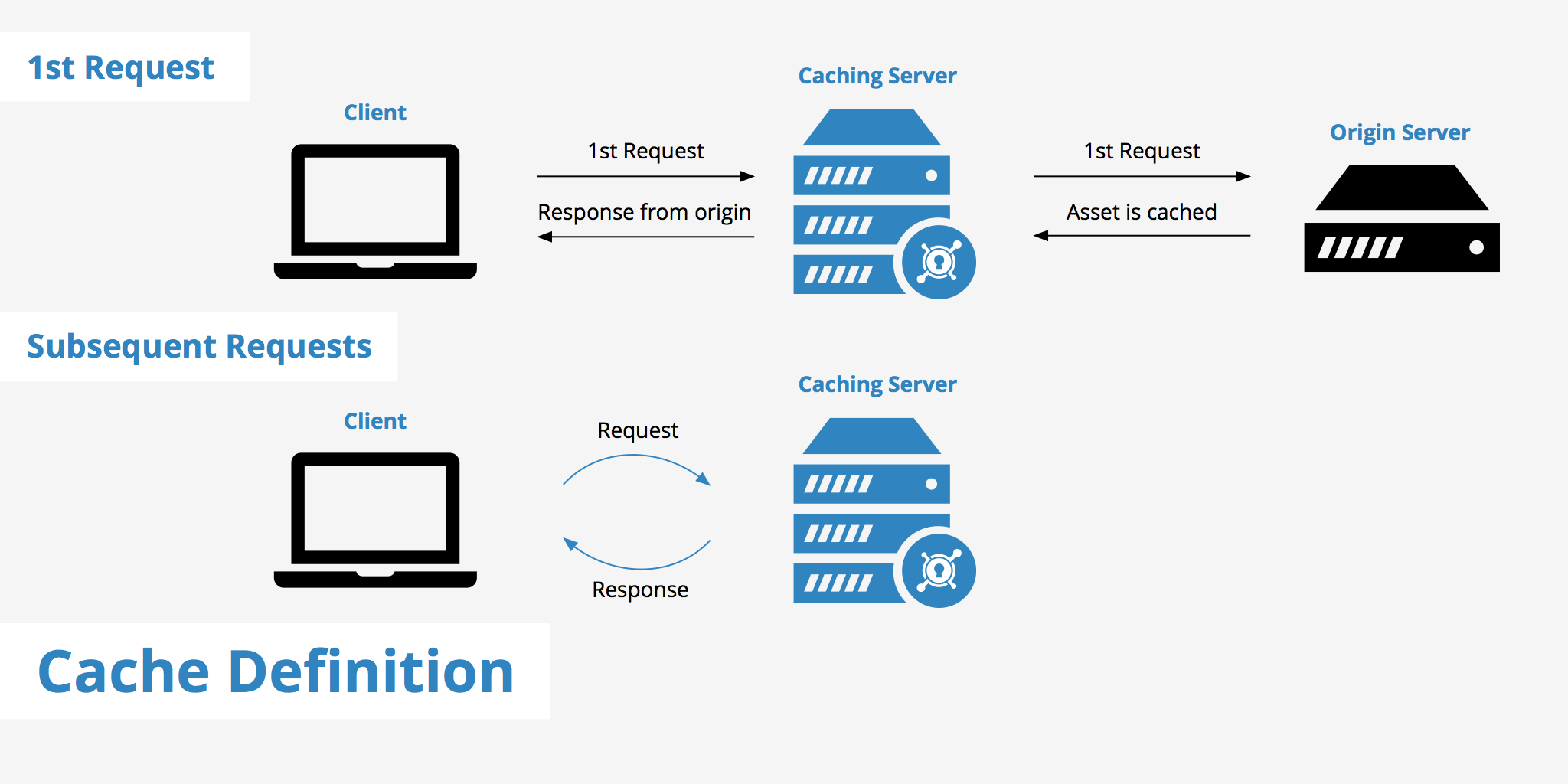
At its core, a cache is a hardware or software component that stores data so that future requests for that data can be served faster. In drone technology, this is not merely a convenience; it is a safety and performance requirement. When a drone is flying autonomously at high speeds, the flight controller must process thousands of data points per second.
How Cache Memory Accelerates Processor Speed
The primary processor of a drone—often an ARM-based System on a Chip (SoC)—operates at gigahertz speeds. However, the internal storage (e.g., eMMC or UHS-II SD cards) where the firmware and flight algorithms reside operates much slower. To prevent the processor from sitting idle while waiting for instructions, engineers implement hardware caches.
These are typically divided into levels: L1, L2, and L3. L1 cache is the smallest and fastest, located directly on the processor core to handle the most immediate instructions. L2 and L3 caches are progressively larger and slightly slower, serving as staging grounds for data that the processor is likely to need next. In the context of “Tech & Innovation,” the optimization of these caches is what allows a drone to run complex neural networks for object detection while simultaneously managing flight stability and telemetry. By keeping the most critical “if-then” logic for flight safety within the L1 or L2 cache, the drone can respond to a sudden gust of wind or an unexpected obstacle in microseconds.
The Difference Between Volatile and Persistent Caches
In drone ecosystems, we must distinguish between volatile hardware caches and persistent software caches. Volatile caches, like the CPU cache mentioned above, lose their data when power is removed. Persistent caches, however, are stored on the drone’s internal memory or the mobile device used as a Ground Control Station (GCS).
Innovation in persistent caching has revolutionized how drones handle mapping data. For instance, when a drone performs a remote sensing mission in an area with poor cellular connectivity, it relies on a persistent map cache. The GCS downloads the high-resolution satellite imagery beforehand and stores it in a software cache. During the flight, the app retrieves the map from the local storage rather than attempting to stream it over a weak 4G/5G connection. This ensures that the pilot and the autonomous navigation system always have a visual reference for the mission parameters.
Map Caching and Navigation Performance
For drones involved in mapping, surveying, and autonomous flight paths, the management of geospatial data is a significant computational challenge. “What is caches” in this context refers to the local storage of tile-based map data and terrain models.
Offline Geospatial Data Management
Modern autonomous drones often operate in “GPS-denied” or “connectivity-denied” environments, such as deep forests, industrial interiors, or remote agricultural fields. To maintain spatial awareness, the drone’s software utilizes map caching. This innovation allows the system to pre-load and “cache” the specific geographic tiles required for a mission.
By utilizing a local cache, the flight software reduces the “Time to First Fix” and ensures that the autonomous pathing algorithms have immediate access to topographical data. If a drone is programmed for a “Follow Me” mode using AI, it doesn’t just look at the subject; it references cached map data to understand the surrounding terrain, ensuring it doesn’t fly into a hillside while tracking its target. This synergy between real-time sensor data and cached environmental data is a hallmark of current drone innovation.
Improving Latency in Remote Sensing Applications
In remote sensing, drones collect massive amounts of multispectral or LiDAR data. Processing this data in real-time requires a sophisticated cache hierarchy. When the drone’s AI identifies a specific feature—such as a diseased crop in a field or a crack in a bridge—it uses a “buffer cache” to store the high-resolution image frames before they are written to the permanent storage.
This buffering prevents data loss during high-throughput operations. Furthermore, when the drone transmits a low-resolution “live view” to the pilot while simultaneously recording 4K data, the caching system manages these two streams to ensure that the live feed remains low-latency. If the cache is poorly managed, the pilot experiences “stutter” or lag, which can be catastrophic during high-stakes maneuvers.
AI and Machine Learning: The Role of Caches in Edge Computing

As we push toward “Level 5” autonomy in drones, the role of AI becomes central. This is where the concept of “caches” moves from simple data storage to complex edge computing. Edge computing refers to processing data on the drone itself rather than sending it to a central server, and it relies heavily on efficient caching.
Object Recognition and Neural Network Weights
AI follow-modes and obstacle avoidance systems use deep learning models. These models consist of “weights” and “biases”—mathematical values that represent the intelligence of the system. For a drone to recognize a person, a vehicle, or a power line, it must run the incoming camera feed through these models.
Innovative drone processors use specialized “AI Caches” to store these neural network weights. By keeping the model parameters in a dedicated high-speed cache, the drone can perform object inference (recognition) in real-time. If the drone had to fetch these weights from the main storage for every frame of video, the frame rate of the AI system would drop from 30 frames per second to perhaps 1 or 2, making autonomous tracking impossible.
Reducing Power Consumption through Data Locality
Innovation in drone technology isn’t just about speed; it’s about endurance. Moving data consumes power. Specifically, moving data from the main RAM to the CPU consumes significantly more energy than moving data from a local cache to the CPU.
By optimizing “data locality”—ensuring that the data the processor needs is always in the closest possible cache—engineers can extend the flight time of a drone. In the competitive world of drone manufacturing, a 5% increase in battery life achieved through smarter caching and reduced data bus activity is a major technological victory. This is why the development of specialized “Drone SoCs” (System on a Chip) focuses so heavily on cache architecture.
Video Caching and Real-Time Transmission
One of the most common ways pilots encounter caches is through the “Video Cache” feature in their flight apps. While this may seem like a simple convenience, it is a vital tool for both creative work and technical troubleshooting.
Buffering for FPV and Live Streaming
When a drone streams video back to a controller, it is essentially sending a compressed stream of data packets. Due to interference or distance, these packets don’t always arrive in the correct order or at the same time. A “jitter buffer”—a type of cache—collects these packets and reassembles them into a smooth video stream.
In “Tech & Innovation,” the sophistication of these streaming caches determines the quality of the FPV (First Person View) experience. Advanced protocols now use predictive caching, where the system anticipates potential packet loss and caches redundant data to fill the gaps, ensuring the pilot never loses their visual link during critical flight phases.
Cache-to-Device: Redundancy and Recovery
Most professional drone apps include an option to “Cache during video recording.” This feature saves a lower-resolution version of the 4K or 8K footage directly to the smartphone or tablet used as the monitor.
The innovation here lies in the safety net it provides. If a drone is lost during a mission, the cached video on the mobile device is often the only record of the flight’s final moments. For investigators or researchers, this cached data can provide the “last-seen” coordinates or visual clues about what caused a failure. Furthermore, for social media creators, the cached video allows for instant editing and sharing without waiting for the high-resolution files to be downloaded from the drone’s internal SD card.
The Future of Caching in Drone Ecosystems
As we look toward the future of drone technology, the evolution of caches will be driven by 5G connectivity and Swarm Intelligence. In a “swarm” scenario, multiple drones must communicate with each other to avoid collisions and coordinate tasks. This requires a “Distributed Cache,” where data about the position and intent of every drone in the swarm is cached across the entire network.
Edge-to-Cloud Caching
The next frontier is the seamless integration of edge and cloud caching. Future drones will use AI to determine which data is “mission-critical” (to be cached locally for immediate action) and which is “analytical” (to be uploaded to the cloud). For example, a drone inspecting a utility line will cache the high-resolution imagery of a suspected fault to ensure it captures all angles, while simultaneously caching the broader geospatial data to the cloud for real-time team collaboration.
In conclusion, “what is caches” is a question that leads to the heart of drone innovation. From the microscopic L1 caches on a flight controller’s CPU to the gigabyte-sized map caches on a pilot’s tablet, these systems are essential for the speed, safety, and intelligence of modern UAVs. As drones become more autonomous and data-intensive, the ability to move, store, and retrieve data efficiently through advanced caching will remain a cornerstone of aerial technology.