In the realm of robotics and computer science, the “Karel the Robot” paradigm serves as the foundational introduction to logic, spatial awareness, and autonomous navigation. For those exploring the cutting edge of drone technology—specifically within the niche of tech and innovation—understanding the architecture of a “Karel world” provides critical insight into how modern autonomous flight systems, mapping algorithms, and remote sensing technologies operate. At its core, the Karel world is a structured environment defined by a Cartesian-like grid, where “streets” and “avenues” form the navigational framework. While Karel was originally designed as a pedagogical tool, the logic underpinning a “street” is the same logic that drives the most sophisticated AI follow modes and autonomous mapping drones in the industry today.
The Geometry of Autonomy: Defining the Street in Robotic Environments
In a Karel world, a street is defined as a horizontal row within a coordinate system. This is contrasted with avenues, which are the vertical columns. Together, they create a grid of intersections where the robot can perform tasks, identify its location, and interact with objects. When we translate this concept to the world of high-tech innovation in unmanned aerial vehicles (UAVs), a street represents more than just a line on a screen; it represents a linear path or a longitudinal flight vector used during systematic data collection.
From 2D Logic to 3D Spatial Awareness
The transition from a simple 2D grid to the 3D environments navigated by modern drones is one of the most significant leaps in aerial innovation. However, the fundamental concept of the “street” remains intact through the use of waypoints and raster scan patterns. When an autonomous drone is tasked with mapping a large agricultural field or a construction site, it does not fly randomly. It follows a series of “streets”—carefully calculated flight lines that ensure overlapping coverage for photogrammetry or LIDAR sensors.
In this context, a street is the primary axis of travel. Modern flight controllers use these linear constraints to simplify the complex mathematics of 3D space. By breaking down a three-dimensional mission into a series of “streets” (horizontal passes) at a fixed altitude, the AI can more efficiently manage battery life, calculate wind resistance, and ensure that every square centimeter of the ground is captured with high-fidelity resolution.
The Role of Cartesian Coordinates in Remote Sensing
In remote sensing, the accuracy of data is entirely dependent on the drone’s ability to maintain its position relative to a global or local grid. The “streets” of a Karel world are the precursors to the “scan lines” used in thermal imaging and multispectral analysis. Tech-forward drones utilize RTK (Real-Time Kinematic) positioning to refine these streets down to centimeter-level accuracy. Without the rigid structure of a grid-based navigational logic, the “stitching” of thousands of individual images into a single cohesive map would be computationally impossible. The street provides the constant—a reliable path that allows the AI to predict where the next data point should be located.
Autonomous Pathfinding and the Evolution of Grid-Based Navigation
Modern autonomous flight is no longer restricted to pre-programmed paths, but the logic of the Karel world still dictates how AI handles obstacle avoidance and pathfinding. Innovation in “SLAM” (Simultaneous Localization and Mapping) technology allows drones to build their own “Karel world” in real-time as they navigate unknown environments.
Simultaneous Localization and Mapping (SLAM)
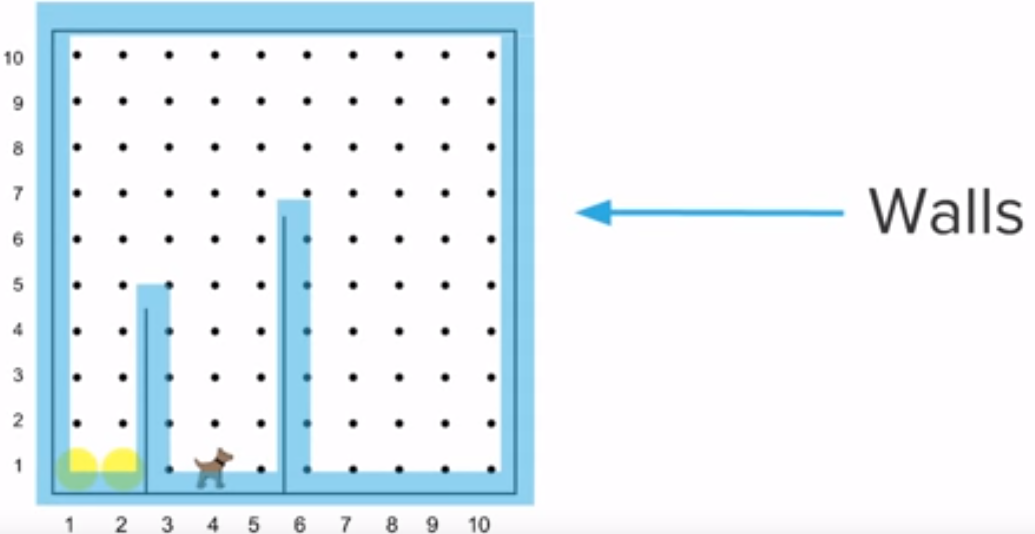
SLAM is perhaps the most significant innovation in drone technology over the last decade. It allows a drone to enter an enclosed space—such as a mine or a collapsed building—and navigate without GPS. To do this, the drone’s onboard AI creates a virtual grid. In this internal map, it identifies “streets” or clear paths of travel and “walls” or obstacles.
The drone’s sensors (often LIDAR or stereo-vision cameras) function like the sensors in a Karel world that detect walls or “beepers.” By identifying its position relative to its custom-built streets, the drone can plot a return path or continue exploring without losing its orientation. This level of autonomy is what enables drones to operate in “GPS-denied” environments, making them indispensable for industrial inspections and search-and-rescue operations.
AI Follow Mode and Predictive Movement
The concept of a “street” also applies to how AI follow modes work. When a drone is programmed to follow a subject, such as a cyclist or a vehicle, it doesn’t just react to the subject’s movement. It builds a predictive corridor—a virtual street—that the subject is likely to follow.
Advanced tech like DJI’s ActiveTrack or Skydio’s Autonomy Engine uses high-speed processors to calculate the most efficient “street” for the drone to occupy to maintain the best filming angle while avoiding obstacles. If a tree enters the drone’s path, the AI creates a detour, effectively switching to a temporary “avenue” before returning to its primary “street” of travel. This logic-based approach to movement ensures smooth, cinematic results while prioritizing the safety of the aircraft.
The Intersection of Mapping and Remote Sensing Innovation
As we push the boundaries of what drones can achieve, the structure of the environment becomes increasingly important. In the world of tech and innovation, “mapping” is no longer just about taking pictures from the sky; it is about creating a “Digital Twin” of the physical world. The Karel concept of streets and avenues is the backbone of this digital transformation.
Precision Agriculture and Digital Grids
In precision agriculture, drones are used to identify crop stress, moisture levels, and pest infestations. To do this effectively, the drone must follow a highly precise grid. Each “street” in this agricultural Karel world represents a row of crops. By utilizing remote sensing payloads, the drone collects data along these streets, which is then processed by AI to create “prescription maps.”
Innovation in this sector has led to variable-rate application (VRA) drones. These drones don’t just map; they act based on the map. Following the “street” logic, a drone can fly over a field and autonomously deploy fertilizer or pesticides only in the specific intersections (waypoints) where the data indicates a need. This targeted approach reduces chemical waste and increases crop yields, representing a massive leap in sustainable technology.
Linear Infrastructure Inspection
Beyond the square grid of a field, “street” logic is applied to linear infrastructure, such as power lines, pipelines, and railways. In these scenarios, the drone is programmed to follow a single, continuous “street” that may span hundreds of miles.
Innovation in long-range autonomous flight (BVLOS – Beyond Visual Line of Sight) relies on the drone’s ability to stay within a very narrow “street” of regulated airspace. Remote sensing technology, such as corona discharge cameras or high-resolution thermal sensors, scans the infrastructure as the drone moves along its path. The tech here is focused on “corridor mapping,” where the drone’s AI must constantly adjust for changes in topography and wind while staying perfectly centered over the “street” of the power line.
AI and the Future of Swarm Robotics
Perhaps the most exciting application of grid-based logic is found in swarm robotics. When multiple drones operate in the same airspace, they must share a coordinated “Karel world” to avoid collisions and maximize efficiency.
Multi-Agent Coordination
In a swarm, each drone is assigned a specific “street” or “sector” within a larger grid. Innovation in mesh networking allows these drones to communicate with one another in real-time. If one drone detects an obstacle or a point of interest on its street, it can relay that information to the rest of the swarm. The AI then reconfigures the entire grid, shifting the “streets” and “avenues” of every drone in the fleet to compensate.
This level of coordination is being tested for large-scale mapping missions, environmental monitoring, and even light shows. The complexity of managing dozens of aircraft simultaneously is mitigated by the fundamental logic of the grid; by assigning each agent to a specific coordinate system, the risk of mid-air collision is virtually eliminated.
Machine Learning and Adaptive Environments
The future of drone innovation lies in machine learning, where the “Karel world” is no longer static. Future AI will be able to recognize that a “street” in a urban environment (like a literal road between buildings) requires different flight parameters than a “street” in an open forest.
By integrating remote sensing data with historical flight logs, drones are becoming “spatially aware” in a way that mimics human intuition. They are beginning to understand the context of the grid. For instance, an autonomous delivery drone might recognize a sidewalk as a “pedestrian street” and choose to fly over the “vehicle street” to minimize risk to people below. This contextual awareness is the next frontier in autonomous navigation, moving us from the rigid lines of the Karel world into a fluid, AI-driven reality.
Through the lens of tech and innovation, a “street” in a Karel world is the DNA of autonomous flight. From the simplest waypoint mission to the most complex SLAM-driven exploration, the grid provides the structure necessary for robots to perceive, navigate, and interact with the physical world. As drones become more intelligent and sensors more capable, the streets of our digital and physical worlds will continue to merge, driven by the timeless logic of the grid.