In the rapidly evolving landscape of technology, innovation is often perceived as a cascade of novel ideas, sophisticated algorithms, and groundbreaking materials. Yet, beneath every autonomous system, every robotic movement, and every intelligent sensor lies a foundational understanding of one of the most fundamental concepts in the universe: force. Physics, particularly the study of forces, provides the indispensable blueprint for designing, optimizing, and predicting the behavior of every technological marvel we create. Without a precise grasp of how forces interact and manifest, the complex systems that define modern tech – from precision robotics to advanced AI-driven control mechanisms – would be impossible to conceive, let alone build and deploy.
The Fundamental Nature of Force: A Prerequisite for Understanding Modern Tech
At its core, a force is an influence that can cause an object with mass to change its velocity, i.e., to accelerate. It’s a push or a pull, an interaction between two objects. In the realm of technology, understanding this interaction is not merely academic; it is the starting point for every engineering endeavor that involves motion, stability, or structural integrity.
Defining Force: Vectorial Influence and Measurable Impact
A force is a vector quantity, possessing both magnitude and direction. This vectorial nature is paramount in technological applications. Consider the development of a robotic arm designed for intricate assembly tasks. The engineers must calculate not only the strength of the force required to lift a component (magnitude) but also the precise direction in which that force must be applied to avoid unintended movements or damage. Similarly, in the design of self-balancing robots or autonomous vehicles, the net force acting on the system dictates its trajectory and stability. The SI unit for force, the Newton (N), quantifies this influence, allowing engineers to standardize measurements and calculations across diverse systems. From the micro-forces in MEMS devices to the macro-forces in heavy industrial machinery, the ability to measure, predict, and manipulate forces is the bedrock upon which all mechanical and structural innovation rests. This understanding informs everything from material stress analysis in novel alloys to the precise control algorithms for delicate haptic feedback systems, making the definition and quantification of force an essential skill for any tech innovator.
Contact vs. Non-Contact Forces: Designing for Interaction and Environment
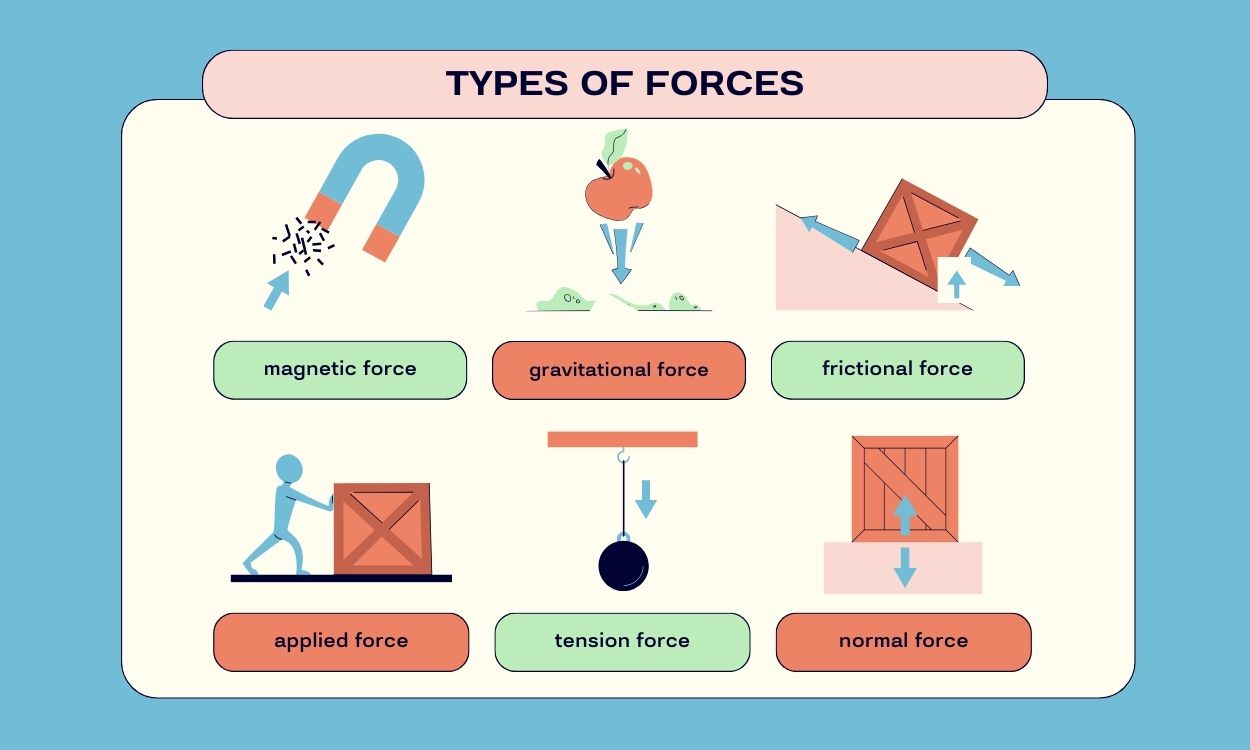
Forces can be broadly categorized into two types based on how they interact with objects: contact forces and non-contact forces. Both play critical roles in various technological applications and demand distinct design considerations.
- Contact Forces: These occur when objects physically touch each other. Examples include frictional forces (essential for robotic locomotion or braking systems in autonomous cars), normal forces (supporting structures and preventing objects from passing through surfaces), tension forces (in cables and robotic grippers), and applied forces (direct pushes or pulls from actuators). In robotics, precise control over contact forces is crucial for manipulation tasks, preventing damage to delicate objects, or ensuring a secure grip. For instance, advanced haptic interfaces simulate contact forces to provide realistic tactile feedback, allowing remote operators to “feel” what a robotic hand is touching. Similarly, the design of new materials for robotic fingertips or tire treads for autonomous vehicles heavily relies on a deep understanding of contact mechanics to optimize grip, wear, and energy efficiency.
- Non-Contact Forces: These forces act on objects without direct physical contact. The most prevalent in technology are gravitational, electromagnetic, and to a lesser extent, nuclear forces. Gravitational forces influence the stability and trajectory of aerial drones, satellites, and even the design of earthquake-resistant smart buildings. Electromagnetic forces, however, are perhaps the most pervasive in modern tech. They are the driving principle behind electric motors, generators, sensors (e.g., Hall effect sensors), wireless power transfer systems, and even magnetic levitation (maglev) technologies. Designing circuits, actuators, and communication systems fundamentally involves manipulating electromagnetic forces. Understanding these non-contact interactions is vital for developing autonomous navigation systems that account for environmental influences, creating more efficient power systems, and enabling remote control and sensing capabilities.
Newton’s Laws of Motion: Engineering Principles for Autonomous Systems
Sir Isaac Newton’s three laws of motion, formulated over three centuries ago, remain the cornerstones of classical mechanics and are directly applicable to the design and operation of virtually every modern technological system involving motion. They provide the predictive framework necessary for engineers to build stable, controllable, and efficient machines.
Inertia and Stability: The First Law in Robotics and Autonomous Flight
Newton’s First Law, also known as the Law of Inertia, states that an object at rest stays at rest, and an object in motion stays in motion with the same speed and in the same direction unless acted upon by an unbalanced force. This law is foundational to designing stable platforms and understanding the need for continuous control inputs in dynamic systems. For autonomous robots, inertia dictates how much force is needed to initiate movement, stop, or change direction. Without an external force (like friction or an active braking system), an autonomous vehicle would continue moving indefinitely. More critically, the concept of inertia is central to the design of control systems that aim to maintain a desired state. In autonomous flight, for instance, a drone’s stability system constantly applies corrective forces to counteract external disturbances (like wind gusts) that would otherwise alter its flight path due to inertia. AI-driven navigation systems must model the inertia of the platform to accurately predict future positions and apply appropriate control forces for smooth, precise maneuvers. Understanding inertia helps engineers minimize energy consumption by designing systems that efficiently overcome or leverage it.

Force, Mass, and Acceleration: The Second Law Driving Propulsion and Control
Newton’s Second Law, often expressed as F=ma (Force equals mass times acceleration), is arguably the most powerful tool in the engineer’s arsenal. It quantitatively links the net force acting on an object to its mass and the acceleration it experiences. This equation is indispensable for designing propulsion systems, calculating required power, and implementing precise control algorithms. In the context of robotics and autonomous systems, F=ma dictates:
- Propulsion System Design: To accelerate an autonomous ground vehicle, a specific force is required. Knowing the vehicle’s mass, engineers can calculate the necessary thrust from electric motors or combustion engines. For aerial vehicles like drones, F=ma helps determine the lift force required from propellers to achieve vertical acceleration, or the thrust needed for horizontal velocity.
- Control Algorithm Development: When an AI system commands a robot to move, it uses F=ma to calculate the exact forces (and thus motor torques) required to achieve the desired acceleration or deceleration, taking into account the robot’s mass. This allows for smooth trajectory planning, collision avoidance, and precise positioning.
- Material Selection and Structural Integrity: Understanding the forces that a system will undergo (and the resulting accelerations) is crucial for selecting materials that can withstand these stresses without deforming or breaking, ensuring the long-term reliability of innovative tech.
- Predictive Modeling: Advanced simulations used in AI and robotics extensively employ F=ma to predict how complex systems will behave under various force conditions, aiding in optimal design and real-time operational adjustments.
Action-Reaction: The Third Law Powering Movement and Interaction
Newton’s Third Law states that for every action, there is an equal and opposite reaction. This law explains how propulsion works in virtually all innovative technologies, from rockets to robotic grippers. When a rocket expels hot gases downwards (action), the gases exert an equal and opposite force upwards on the rocket, propelling it into space (reaction). Similarly:
- Robotic Locomotion: When a robot’s wheels push against the ground (action), the ground pushes back on the wheels (reaction), allowing the robot to move forward. The efficiency of this interaction is critical for energy consumption and movement precision.
- Propeller and Jet Engines: Propellers push air downwards (action), and the air pushes the propeller – and thus the aircraft or drone – upwards (reaction). Jet engines expel exhaust gases backward (action), creating forward thrust (reaction).
- Manipulators and Grippers: When a robotic gripper exerts a force to grasp an object (action), the object exerts an equal and opposite force back on the gripper (reaction). Engineers must account for this reaction force to prevent the robot from over-gripping and damaging the object, or under-gripping and dropping it.
- Satellite Orientation: Reaction wheels on satellites leverage this principle. By spinning a wheel in one direction (action), the satellite body rotates in the opposite direction (reaction), allowing for precise attitude control without expelling propellant.
This fundamental principle allows engineers to design systems that generate controlled movement and interaction, forming the basis for dynamic stability and precise manipulation in countless technological applications.
Key Force Types and Their Technological Manifestations
While Newton’s Laws provide a framework for how forces behave, understanding the specific types of forces and their underlying mechanisms is crucial for advanced technological design.
Gravitational Forces: From Terrestrial Stability to Orbital Dynamics
Gravity, the pervasive non-contact force of attraction between any two objects with mass, profoundly influences countless technological designs. On Earth, gravity constantly pulls everything downwards, making it a primary consideration for structural stability in buildings, bridges, and stationary robotic platforms. Engineers must design systems to withstand or counteract gravity, whether it’s the robust framework of a skyscraper or the precise lift generation of a heavy-lift drone. In space, gravity dictates orbital mechanics, essential for satellite deployment, navigation, and maintaining communications infrastructure. Understanding microgravity environments is vital for designing equipment for space exploration, such as advanced life support systems or robotic manipulators for lunar or Martian missions. Furthermore, innovative sensor technologies, like gravimeters, are being developed for subterranean mapping and resource exploration, leveraging subtle variations in gravitational fields.
Frictional Forces: Enabling Traction, Braking, and Micro-Robotics
Friction, a contact force that opposes relative motion between surfaces, is a dual-edged sword in technology: sometimes an impediment to be minimized, other times a critical enabler. In robotics, friction is essential for locomotion; wheels and treads rely on static friction with the ground to generate traction and move forward. Braking systems in autonomous vehicles also depend entirely on friction to convert kinetic energy into heat and bring the vehicle to a halt safely and precisely. Engineers innovate by designing new materials with specific frictional properties, such as advanced tire compounds or specialized coatings for robotic grippers to improve performance. Conversely, in systems where motion needs to be smooth and energy-efficient, such as in precision instruments or high-speed rotating machinery, friction must be minimized through lubricants, magnetic bearings, or air bearings. In the emerging field of micro-robotics, controlling friction at the nanoscale is paramount for the movement and manipulation capabilities of tiny machines.
Electromagnetic Forces: The Engine of Modern Electronics and Actuators
Electromagnetic forces are arguably the most impactful in modern technology, underpinning virtually all electrical and electronic devices. They are the forces between electrically charged particles, manifesting as both electric and magnetic phenomena.
- Electric Motors and Generators: The operation of every electric motor, from those in electric vehicles and drones to industrial robots, relies on the interaction between magnetic fields and electric currents, generating torque and rotational motion. Conversely, generators use electromagnetic induction to produce electricity.
- Sensors and Actuators: From basic switches to sophisticated Hall effect sensors (measuring magnetic fields for positioning or speed detection), electromagnetic principles are fundamental. Solenoids, electromagnetic relays, and voice coil actuators leverage these forces for controlled linear or rotational movement in everything from camera focusing mechanisms to industrial automation.
- Wireless Communication: Radio waves, microwaves, and visible light are all forms of electromagnetic radiation, enabling wireless communication, remote sensing, and data transfer. Understanding electromagnetic forces is key to designing antennas, signal processing units, and robust communication protocols for autonomous networks.
- Magnetic Levitation (Maglev): Innovative transportation systems like maglev trains use powerful electromagnetic forces to levitate vehicles above a track, eliminating friction and allowing for extremely high speeds with minimal energy loss.
- Medical Technology: MRI machines use powerful magnetic fields and radio waves to create detailed images of the human body, showcasing the transformative power of electromagnetic forces in diagnostics.
The Interplay of Forces: Towards Sophisticated System Design
Modern technology does not rely on isolated forces but rather on the intricate interplay of multiple forces, often simultaneously. The true genius in technological innovation lies in understanding and orchestrating these interactions to achieve complex functionalities.
Force Analysis in Advanced Robotics and AI Systems
In advanced robotics and AI-driven systems, sophisticated algorithms are developed to perform real-time force analysis. For a humanoid robot walking on uneven terrain, the control system must continuously calculate and adjust the ground reaction forces (normal and frictional) to maintain balance, taking into account the robot’s changing center of gravity due to gravity and inertia. In collaborative robotics, where robots work alongside humans, force-torque sensors are critical. These sensors measure the forces and torques exerted at the robot’s end-effector, allowing the robot to detect contact, prevent excessive force application, and react safely to human interaction. AI systems can learn from these force readings to develop more nuanced and adaptive manipulation strategies, mimicking human dexterity in complex tasks. Furthermore, in virtual reality (VR) and augmented reality (AR) applications, advanced haptic feedback systems use precise actuators to recreate contact forces, pressure, and vibrations, enhancing user immersion and interaction with virtual objects. The ability to model, measure, and react to forces is what elevates basic automation to intelligent, adaptive systems.
Energy, Work, and Power: Optimizing Efficiency in Technological Applications
While force describes an interaction, the concepts of work, energy, and power describe the outcomes of these interactions over time and distance. Work is done when a force causes displacement, and energy is the capacity to do work. Power is the rate at which work is done or energy is transferred. These concepts are absolutely crucial for optimizing the efficiency and performance of all innovative tech.
- Energy Efficiency: Designing energy-efficient autonomous vehicles, drones, and industrial robots involves minimizing wasted energy (e.g., through friction or air resistance) and maximizing the conversion of stored energy (batteries, fuel) into useful work (movement, manipulation). Engineers meticulously analyze the forces involved in every operation to reduce power consumption and extend operational times, a key differentiator in competitive tech markets.
- Power Management: In high-performance computing, advanced AI processors, and powerful robotic actuators, power delivery systems must be precisely engineered to provide the necessary power to overcome forces and perform tasks effectively, without overheating or failing. This involves understanding the interplay of electrical and mechanical forces.
- Kinetic and Potential Energy: Autonomous systems leverage the principles of kinetic and potential energy. For example, regenerative braking systems in electric vehicles convert kinetic energy back into electrical energy during deceleration, rather than dissipating it as heat. Drones climbing to altitude store potential energy, which can then be converted back into kinetic energy during descent.
In conclusion, “what is a force in physics” is far more than a textbook definition; it is the foundational language of interaction and motion that underpins the entire edifice of technological innovation. From the microscopic forces guiding nanotechnology to the gravitational forces governing space missions, and the electromagnetic forces powering our digital world, an insightful understanding of forces enables engineers and innovators to transcend limitations, design with precision, and continuously push the boundaries of what is technologically possible. It is the unseen architect, shaping every aspect of the sophisticated, intelligent, and autonomous systems that define our future.