In the rapidly evolving landscape of unmanned aerial vehicles (UAVs) and autonomous systems, the hardware—the carbon fiber frames, high-torque motors, and sophisticated sensors—often takes center stage. However, as drones transition from remotely piloted toys to intelligent, autonomous edge-computing platforms, the focus has shifted toward the software that powers them. At the heart of this software revolution is a small but powerful text document known as a Dockerfile.
For those operating in the “Tech & Innovation” sector of the drone industry—specializing in AI follow modes, autonomous navigation, and remote sensing—understanding what a Dockerfile is and how it functions is no longer optional. It is the fundamental blueprint that ensures complex algorithms run reliably, whether they are being tested in a cloud simulation or executed on a drone’s onboard computer mid-flight.

Understanding the Core: The Role of Containerization in Modern Drone Tech
To understand a Dockerfile, one must first understand the concept of containerization. In the early days of drone development, installing software was a delicate manual process. A developer might spend days configuring a specific version of Linux, installing specific drivers for a GPU, and hunting down compatible libraries for the Robot Operating System (ROS). If any single version was slightly off, the entire system would crash.
Defining the Dockerfile in an Unmanned Context
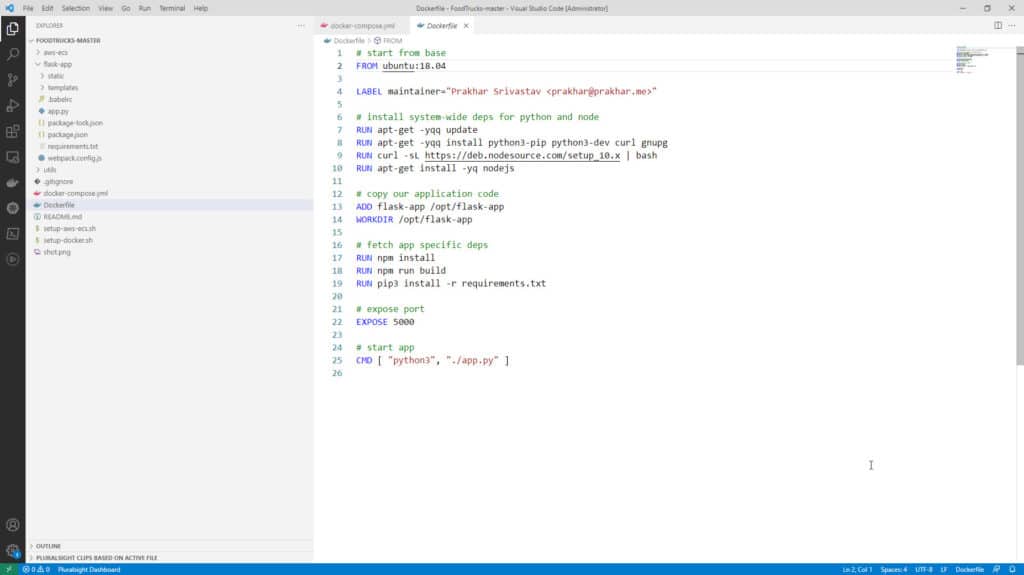
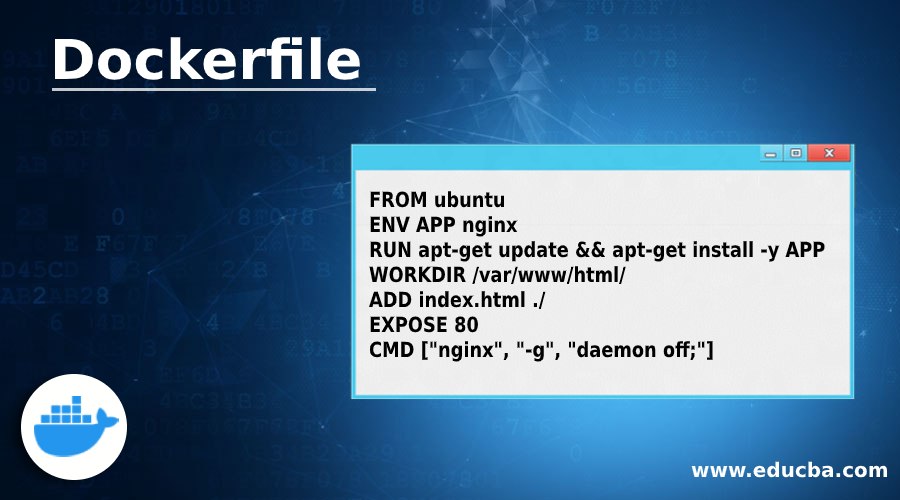
A Dockerfile is essentially a script containing a series of sequential commands and instructions used to automatically create a “Docker Image.” Think of it as a specialized recipe. Just as a chef needs a precise list of ingredients and steps to ensure a dish tastes the same every time, a drone engineer uses a Dockerfile to define the exact environment a piece of software needs to run.
In the niche of autonomous flight, this “environment” includes the operating system, environmental variables, file paths, and the specific versions of AI frameworks like TensorFlow or PyTorch. When the Dockerfile is “built,” it creates an image—a lightweight, standalone, executable package that includes everything needed to run an application.
From Code to Deployment: The Build Process
The process begins with the “Base Image,” usually defined in the first line of the Dockerfile (the FROM command). For a drone application, this might be a slimmed-down version of Ubuntu or a specialized NVIDIA Jetson image. From there, the Dockerfile tells the system to “COPY” the navigation code into the container, “RUN” the installation of necessary sensor drivers, and “EXPOSE” the ports needed for telemetry data.
By automating this, innovation moves faster. A developer in London can write a Dockerfile for a new autonomous mapping algorithm, and a technician in a field in Australia can build that exact same environment on a drone with a single command, eliminating the “it works on my machine” syndrome that has plagued software engineering for decades.
Why Dockerfiles are Vital for Autonomous Flight and AI
As drones become more autonomous, they rely on “Edge Computing”—processing data locally on the aircraft rather than sending it to a distant server. This requires incredibly complex software stacks to be crammed into small, power-efficient computers like the NVIDIA Jetson Orin or Raspberry Pi Compute Modules.
Ensuring Environment Consistency Across Edge Devices
One of the greatest challenges in drone innovation is hardware heterogeneity. A fleet might consist of several different drone models, each with slightly different internal components. Using Dockerfiles allows developers to abstract the software from the hardware.
By defining the software environment in a Dockerfile, the AI follow-mode that detects a hiker in a forest will behave identically on a heavy-lift hexacopter as it does on a compact quadcopter. This consistency is vital for safety; in autonomous flight, a minor software discrepancy caused by a library mismatch could lead to a catastrophic navigation error.
Simplifying Complex Dependencies for Computer Vision
Computer vision is the “eyes” of a modern drone, enabling obstacle avoidance and path planning. These systems depend on a web of interconnected libraries (OpenCV, CUDA, ROS). Manually managing these dependencies is a nightmare.
A Dockerfile acts as a version-control system for the entire environment. If a new version of an obstacle avoidance algorithm requires a specific update to a vision library, that change is documented in the Dockerfile. This allows teams to roll back to previous “known-good” configurations instantly if a new update causes flight instability, providing a layer of operational security that is essential for high-stakes drone missions.
Practical Applications: Dockerfiles in Mapping and Remote Sensing
The utility of the Dockerfile extends beyond the flight controller and into the massive data-processing pipelines required for remote sensing and 3D mapping. When a drone captures thousands of 4K images for a photogrammetry project, that data must be processed into a cohesive map.
Scaling Photogrammetry in the Cloud
Modern mapping platforms often use “clusters” of servers to process aerial data. Dockerfiles allow these platforms to be “cloud-native.” An organization can take the Dockerfile used to develop their mapping software and deploy it across hundreds of virtual machines simultaneously. Because the Dockerfile ensures the environment is identical on every machine, the workload can be split up (parallelized) without risk of data corruption or processing errors. This turns a task that once took days into something that can be completed in hours.
Streamlining Over-the-Air (OTA) Updates
In the world of Tech & Innovation, the ability to update a drone’s capabilities remotely is a game-changer. Through the use of Docker containers (built from Dockerfiles), companies can push “Over-the-Air” updates to drones in the field. Instead of reflashing the entire operating system of the drone—which is risky and time-consuming—they simply push a new image.
The drone pulls the new container, swaps it with the old one, and suddenly has a new AI model for crop health analysis or an improved thermal sensing algorithm. This modularity is what allows modern drone platforms to stay relevant for years after their initial hardware release.
Best Practices for Crafting Efficient Drone-Centric Dockerfiles
Not all Dockerfiles are created equal. In the drone industry, where storage space on edge devices is limited and processing power is a precious resource, optimizing the Dockerfile is a specialized skill.
Optimizing for ARM Architecture and Edge Constraints
Most drones run on ARM-based processors, which differ significantly from the x86 processors found in standard laptops. A professional drone software engineer must ensure their Dockerfile is designed for “multi-arch” builds. Furthermore, a poorly written Dockerfile can result in an image that is several gigabytes in size—far too large for a drone with limited eMMC storage.
To combat this, engineers use “Lightweight Base Images” like Alpine Linux or “Slim” versions of Ubuntu. By keeping the footprint small, the drone starts up faster, and the software leaves more RAM available for critical flight-path calculations.
Multi-Stage Builds for Lightweight Flight Payloads
One of the most advanced techniques in Dockerfile creation is the “Multi-Stage Build.” In this process, the Dockerfile is divided into two parts. The first stage contains all the “bloat”—the compilers, build tools, and raw source code needed to create the application. The second stage then “grabs” only the finished, compiled executable and places it into a fresh, tiny image.
The result is a highly secure and incredibly small container that contains nothing but the essential code needed to fly the drone or process sensor data. This reduces the “attack surface” for potential cybersecurity threats and ensures that the drone’s processor is not wasted on background tasks that aren’t necessary for the mission.
The Future: Dockerfiles as the Foundation of Swarm Intelligence
Looking ahead, the role of the Dockerfile in drone innovation will only grow as we move toward “Swarm Intelligence.” When dozens or hundreds of drones work together to perform a search-and-rescue mission or a light show, they must operate as a single, synchronized organism.
The Dockerfile provides the standardized DNA for these swarms. By ensuring every drone in the swarm is running the exact same containerized environment, developers can predict swarm behavior with mathematical precision. Innovation in this space is no longer just about the flight of a single aircraft; it is about the orchestration of a digital ecosystem, all made possible by the humble Dockerfile.
In conclusion, while the Dockerfile may seem like a dry, technical document, it is actually the catalyst for the most exciting advancements in drone technology today. It provides the reliability, scalability, and flexibility required to take AI and autonomous systems out of the laboratory and into the sky. For anyone looking to lead in the field of drone innovation, mastering the Dockerfile is the first step toward building the future of flight.