The Decentralized Foundation of Modern Drone Operations
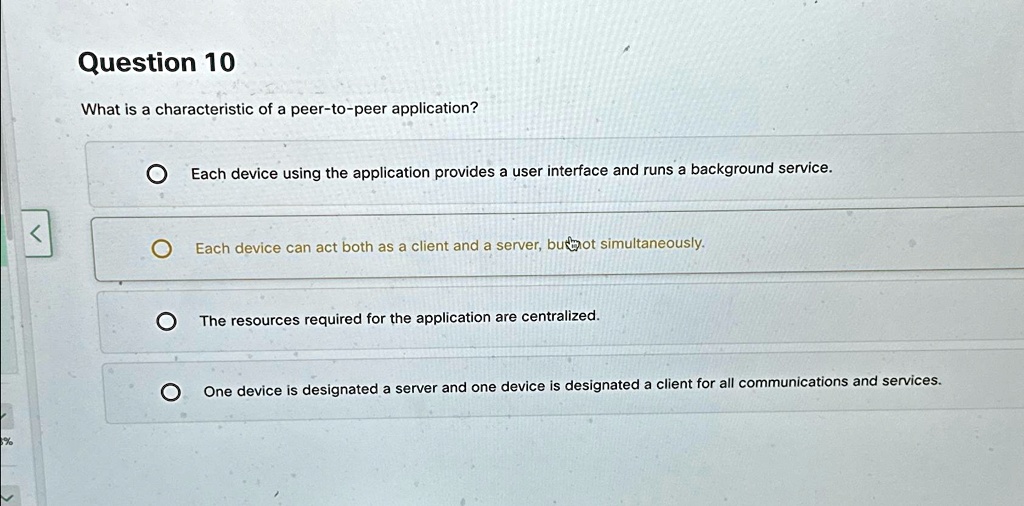
The advent of peer-to-peer (P2P) technology has profoundly reshaped numerous technological landscapes, and its influence on drone operations is no exception. At its core, a peer-to-peer application is characterized by its decentralized architecture, where each participant, or “peer,” can act as both a client and a server. This fundamental characteristic eliminates the reliance on a single, central server for data exchange, control, and communication. For the world of drones, this translates into a more robust, resilient, and scalable operational framework, particularly when considering applications ranging from FPV (First-Person View) racing to complex autonomous mapping missions.
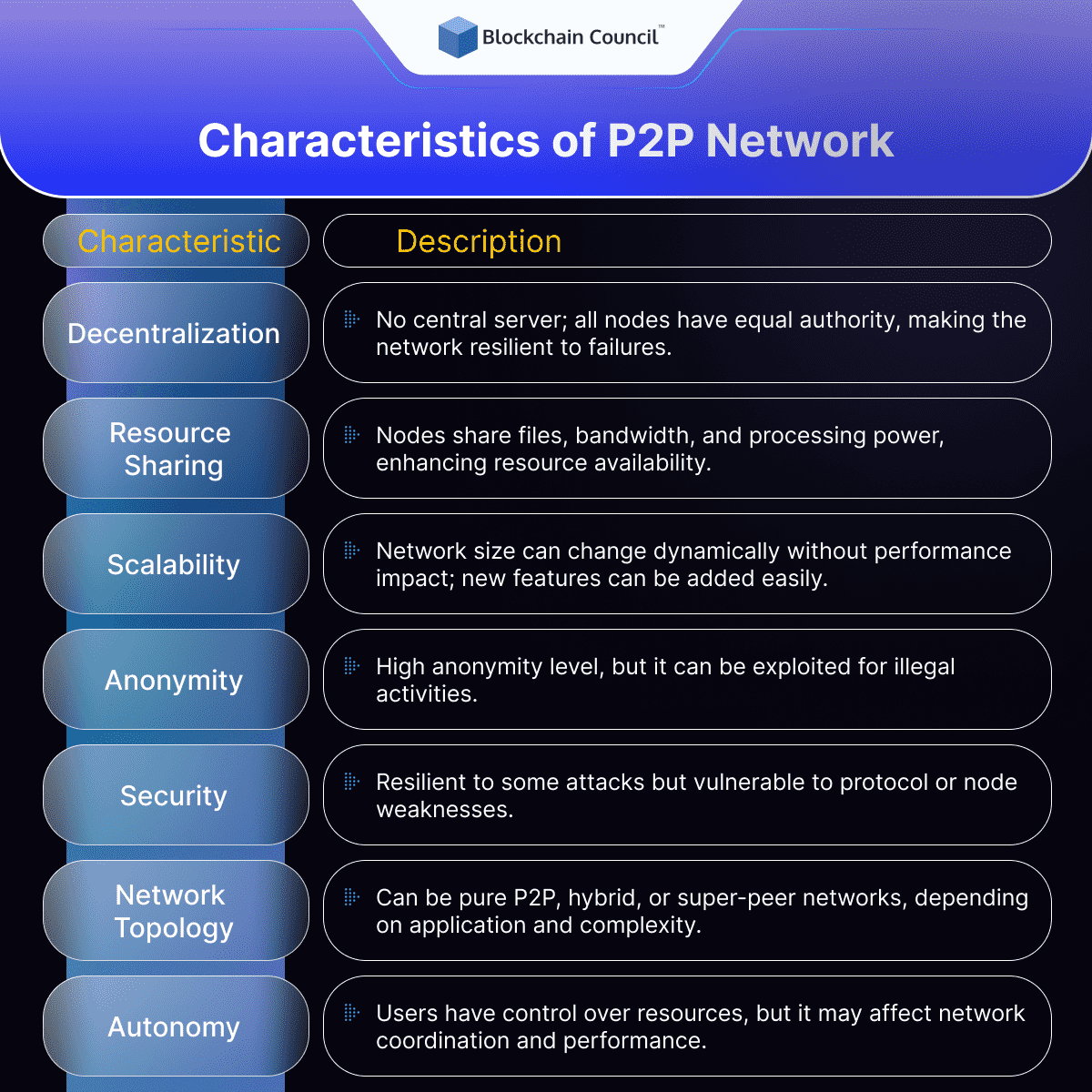
The absence of a single point of failure is a paramount benefit derived from this P2P characteristic. In traditional client-server models, if the central server goes offline, the entire network or application ceases to function. For drone operations, which often occur in remote or dynamic environments, this vulnerability can be catastrophic. Imagine a fleet of drones engaged in search and rescue or a large-scale aerial inspection project. If the central command server were to fail, communication between the drones, ground control stations, and operators would be severed, potentially leading to mission failure or, worse, loss of valuable assets. P2P architectures, by distributing functionality across multiple peers, ensure that the network can continue to operate even if some nodes become unavailable. This inherent resilience is a defining characteristic that makes P2P technology exceptionally well-suited for the demanding nature of drone applications.
Furthermore, P2P applications facilitate direct communication and data sharing between peers. In the context of drones, this can manifest in several ways. For instance, in FPV racing, multiple drones can share real-time telemetry data, such as speed, altitude, and battery levels, directly with each other, enabling more sophisticated racing strategies and immediate situational awareness for pilots. Beyond racing, this direct peer-to-peer communication can be leveraged for swarm intelligence, where drones coordinate their actions and share sensor data amongst themselves to achieve a common objective. This distributed decision-making process, driven by local interactions between peers, can lead to more efficient and adaptive behaviors in complex scenarios, such as coordinated surveillance or collaborative environmental monitoring.
Enhanced Scalability and Flexibility
Another significant characteristic of P2P applications, directly impacting drone technology, is their inherent scalability. As the number of users or devices (peers) in a P2P network increases, the network’s capacity and performance often increase proportionally, or at least without a significant bottleneck. This is in stark contrast to client-server models, where adding more clients can overload the central server, requiring costly upgrades and maintenance.
For drone operations, this scalability is crucial. Consider a scenario where a large drone service provider is expanding its operations, deploying hundreds or even thousands of drones for various tasks. A P2P network can seamlessly accommodate this growth. Each new drone added to the network can contribute its processing power and communication bandwidth, enhancing the overall capability of the system. This is particularly relevant for applications like large-area photogrammetry or urban traffic monitoring, which require the coordination and data aggregation of numerous aerial platforms. The ability to scale without a central server becoming a bottleneck allows for cost-effective expansion and agile adaptation to fluctuating operational demands.
The flexibility afforded by P2P architectures is also a key characteristic. In a P2P drone system, individual drones are not passively receiving commands from a central authority. Instead, they can actively participate in the network, share resources, and even offload computational tasks to other peers. This distributed intelligence allows for more dynamic mission planning and execution. For example, in an autonomous exploration mission, drones equipped with different sensor payloads can share their findings and processing capabilities. A drone with a high-resolution camera might capture imagery, while another with advanced AI processing capabilities could analyze that imagery in real-time, sharing the results with other drones in the vicinity without needing to send all raw data back to a central server. This distributed processing capability not only reduces latency but also conserves bandwidth, which is often a limited resource in aerial operations.
Resource Sharing and Data Distribution
The characteristic of resource sharing is intrinsically linked to the P2P model. In a traditional network, specific devices are designated as servers, responsible for storing and providing resources. In a P2P network, any peer can offer its resources, such as processing power, storage space, or bandwidth, to other peers. For drone applications, this can be transformative.

For instance, imagine a fleet of drones collecting vast amounts of data, such as high-definition video footage or complex sensor readings. Instead of relying on a single, potentially remote, data storage server, P2P technology allows drones to share their storage capacity. This distributed storage can enhance data redundancy and accessibility. If one drone experiences a hardware failure, its data can still be accessed from other peers within the network. This is especially beneficial for long-duration missions or operations in areas with intermittent connectivity, where constant access to a central data repository might be unreliable.
Beyond storage, processing power can also be shared. Drones are becoming increasingly sophisticated, equipped with powerful onboard processors capable of performing complex tasks like real-time object recognition, path planning, and sensor fusion. In a P2P framework, drones can collaboratively process data. A drone that has completed its primary task might offer its spare processing cycles to another drone that is computationally intensive tasks. This distributed computing approach can accelerate complex analyses, enable more sophisticated AI algorithms to run onboard, and reduce the reliance on powerful, expensive ground stations for real-time data processing. This is particularly relevant for applications such as advanced mapping and surveying, where large datasets need to be processed quickly for immediate decision-making.
Collaborative Networks and Enhanced Communication Protocols
The collaborative nature of P2P networks fosters the development of sophisticated communication protocols tailored for distributed environments. This is a key characteristic that enables drones to operate effectively in complex, dynamic scenarios. Instead of relying on a single command-and-control channel, P2P drone systems can establish mesh networks where each drone acts as a node, relaying information for its neighbors.
This mesh networking capability significantly extends the operational range and reliability of drone communications. In areas with significant signal obstruction, such as urban canyons or dense forests, a drone might not be able to communicate directly with the ground control station. However, through a P2P mesh network, it can relay its data through other drones that are within range of the ground station. This creates a resilient communication infrastructure that is far more robust than traditional line-of-sight radio links.
Moreover, P2P architectures facilitate the development of dynamic and adaptive communication protocols. These protocols can automatically adjust to network conditions, prioritizing critical data and rerouting information around congested or unavailable nodes. This is essential for applications like emergency response, where timely and reliable communication can be a matter of life and death. The ability of drones to autonomously form and maintain these communication links without constant human intervention is a direct result of the P2P paradigm.
Consider the potential for advanced swarm behaviors. In a P2P swarm, drones can share not just raw data but also their “intentions” and “perceptions.” This allows for emergent behaviors where the collective action of the swarm surpasses the capabilities of any individual drone. For example, in a coordinated search pattern, drones can share their search progress and adjust their individual paths in real-time to optimize coverage, ensuring that no area is missed and avoiding redundant searching. This level of autonomous, coordinated behavior is a hallmark of advanced P2P applications in the drone domain.
Implications for Innovation and Future Development
The core characteristic of a peer-to-peer application—its decentralized, distributed nature—is a powerful enabler for future innovation in drone technology. It fosters an ecosystem where individual drones are not just remote-controlled devices but active, intelligent participants in a larger, interconnected network.
One of the most exciting areas of P2P application in drones is in the realm of autonomous flight and AI-driven operations. By enabling direct communication and resource sharing between drones, P2P technology allows for the distributed execution of complex AI algorithms. This could lead to drones that can collaboratively navigate challenging environments, autonomously identify and track targets, and even adapt their mission parameters based on real-time feedback from other drones in the swarm.
Furthermore, P2P architectures are well-suited for the development of decentralized applications (dApps) within the drone industry. These dApps could revolutionize how drone data is managed, secured, and monetized. For example, a P2P marketplace could emerge where drone operators can share flight data, processing capabilities, or even specialized drone services directly with each other, bypassing traditional intermediaries and creating more efficient and transparent transactions. Blockchain technology, often intertwined with P2P principles, could provide a secure and immutable ledger for tracking drone flight logs, maintenance records, and ownership, enhancing accountability and trust within the drone ecosystem.
The ability to create resilient, scalable, and flexible networks through P2P technology is not merely an operational advantage; it is a fundamental shift in how we conceive of and deploy drone systems. As drone applications continue to expand into more complex and critical domains, from urban air mobility to precision agriculture and infrastructure inspection, the characteristics of peer-to-peer applications will undoubtedly play an increasingly vital role in shaping their future. The move towards decentralized control, distributed intelligence, and direct peer interaction is not just a trend; it is the foundational principle that will drive the next generation of aerial innovation.