A bootloader, in the context of embedded systems and computing, is a small, specialized piece of software responsible for initiating the startup process of a device. It acts as the very first program that executes when a system powers on, bridging the gap between the hardware and the main operating system or application firmware. Without a bootloader, the central processing unit (CPU) of a device would have no instructions to execute upon receiving power, rendering it inert. Essentially, it’s the critical first step that breathes life into complex electronic systems, including the sophisticated hardware found in modern drones.
The Fundamental Role of the Bootloader in Embedded Systems
The bootloader’s primary function is to load and initialize the core components of a system, preparing it for subsequent operations. This involves a series of carefully orchestrated steps that enable the hardware to communicate and execute the main software.
Initialization of Hardware
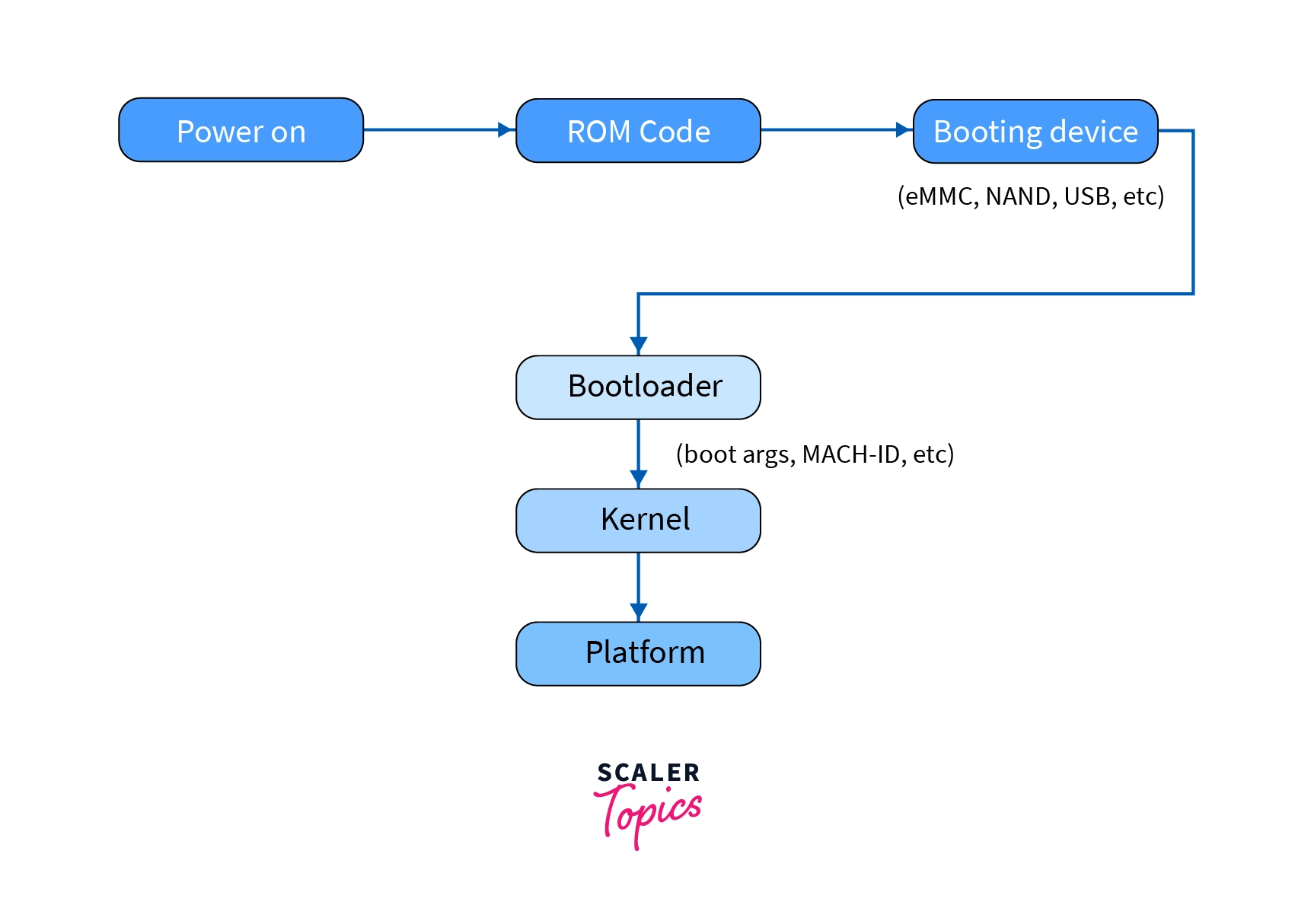
Upon receiving power, the CPU executes code from a predefined memory location, which is typically ROM (Read-Only Memory) or a dedicated boot ROM within the system-on-a-chip (SoC). This initial code, the bootloader, begins by performing a Power-On Self-Test (POST). This diagnostic process checks essential hardware components like the CPU, RAM, and essential peripherals to ensure they are functioning correctly. Any critical failure detected during POST will usually halt the system and might trigger an error indication.
Following a successful POST, the bootloader is responsible for configuring the essential hardware. This includes setting up memory controllers, initializing communication interfaces (like UART, SPI, I2C), and configuring clock speeds. These low-level configurations are crucial for enabling the CPU to access and interact with other components and memory. For instance, memory controllers need to be properly set up to allow the bootloader to read from and write to RAM, which is where the main firmware will eventually reside.
Loading the Main Firmware
Once the fundamental hardware is initialized and validated, the bootloader’s next critical task is to locate and load the main firmware or operating system into the system’s RAM. The firmware can be stored in various forms of non-volatile memory, such as NAND flash, NOR flash, eMMC, or even SD cards. The bootloader contains the necessary drivers and logic to access this storage medium.
The process of loading involves reading the firmware image from the storage device and copying it, byte by byte, into the RAM. This is a resource-intensive operation, and the bootloader must be efficient in its execution. Once the firmware is fully loaded into RAM, the bootloader typically performs a final check on its integrity, often using a checksum or cyclic redundancy check (CRC) to ensure no data corruption occurred during the loading process.
Transferring Control to the Main Firmware
The culmination of the bootloader’s work is the transfer of execution control to the loaded main firmware. This is achieved by jumping to the entry point of the firmware, which is a specific memory address where the firmware’s executable code begins. From this point onward, the main firmware takes over the responsibility of managing the system, executing application logic, and interacting with the user or other devices. The bootloader’s job is then complete for that particular startup sequence.
Bootloader Functionality in the Context of Drones
In the realm of drones, the bootloader plays an indispensable role, underpinning the complex software and hardware integration that enables flight. From the moment a drone is powered on to the moment its flight controller becomes operational, the bootloader is silently working in the background.
Powering Up the Flight Controller
The heart of a drone’s control system is its flight controller. This board houses the main processor, sensors (IMU, barometer, GPS), and communication modules. When you connect a battery or press the power button on a drone, the bootloader on the flight controller’s microcontroller is the first code to run. It performs the initial hardware checks, ensuring that the CPU, memory, and critical sensors are ready for operation. This is a fundamental step that guarantees the flight controller is in a state where it can begin its sophisticated flight management tasks.
Verifying and Loading Flight Software
The flight controller’s firmware, often referred to as the autopilot software (e.g., ArduPilot, Betaflight, PX4), is what dictates the drone’s flight behavior, stability, navigation, and responsiveness. The bootloader is responsible for finding this flight software, which is typically stored in flash memory on the flight controller. It reads this software and loads it into the flight controller’s RAM.
A crucial aspect of drone bootloaders is their involvement in firmware updates. During a firmware update process, a new version of the flight software is uploaded to the drone. The bootloader plays a role in ensuring this update is written correctly to the non-volatile storage. Upon subsequent reboots, the bootloader will load the newly updated firmware, allowing the drone to operate with the latest features and bug fixes. Some bootloaders also implement mechanisms to verify the integrity and authenticity of the firmware before loading it, adding a layer of security against malicious or corrupted software.
Enabling Special Modes and Debugging

Beyond standard operation, drone bootloaders can often support special modes that are invaluable for maintenance, diagnostics, and advanced customization. One common example is a “DFU” (Device Firmware Update) mode. When a flight controller is in DFU mode, it bypasses the normal loading of flight software and enters a state where it can be programmed or reprogrammed via a USB connection. This is essential for recovering a drone from a failed firmware update or for flashing new firmware using a computer.
Furthermore, bootloaders can facilitate debugging. They might include rudimentary serial communication capabilities to output diagnostic information during the startup process. This can help engineers and advanced users identify issues that might prevent the flight controller from booting correctly. This low-level access provided by the bootloader is critical for troubleshooting complex hardware and software interactions within the drone’s electronic ecosystem.
Bootloader Evolution and Advanced Features
The role and capabilities of bootloaders have evolved significantly, particularly with the increasing complexity of embedded systems and the demand for more robust, secure, and flexible operations.
Secure Boot and Trusted Execution
In many modern embedded systems, including advanced drones, security is a paramount concern. Bootloaders are increasingly incorporating security features to ensure that only authorized and untampered software can run on the device. This concept is known as “secure boot.” The bootloader performs cryptographic checks on the firmware it is about to load. This involves verifying digital signatures embedded within the firmware using public-key cryptography. If the signature is invalid or the firmware has been tampered with, the bootloader will refuse to load it, thus preventing the execution of potentially malicious code.
This secure boot process creates a chain of trust, starting from a hardware root of trust (often a secure element or a hardcoded key in the processor) and extending through the bootloader to the main operating system or application firmware. This ensures that the entire software stack running on the device is authentic and has not been compromised. For drones operating in sensitive environments or carrying valuable payloads, this level of security is becoming increasingly critical.
Bootloader Configuration and Customization
While many bootloaders are pre-programmed by the manufacturer, there are scenarios where bootloader configuration and customization are necessary. For developers and advanced users, bootloaders can sometimes be modified or configured to change boot order, enable specific hardware features during initialization, or alter boot parameters. This level of control is often seen in open-source hardware platforms or during the development phase of new drone designs.
However, modifying bootloader code requires a deep understanding of the underlying hardware and software architecture. Incorrect modifications can easily render a device unbootable, requiring specialized tools and knowledge for recovery. Therefore, bootloader customization is typically reserved for experienced professionals or for specific, well-documented use cases.
Over-the-Air (OTA) Bootloader Updates
A more advanced feature being integrated into some modern embedded systems, including high-end drones, is the ability for the bootloader itself to be updated over-the-air (OTA). Traditionally, bootloader updates required a physical connection to the device (e.g., via USB) and specialized flashing tools. However, with OTA bootloader updates, the bootloader can be updated remotely, similar to how regular firmware updates are delivered.
This capability is particularly valuable for patching security vulnerabilities in the bootloader itself or for introducing new bootloader features without requiring physical access to the drone. It enhances the manageability and security posture of fleets of drones, allowing for seamless updates across many devices. This sophistication in bootloader management reflects the growing complexity and criticality of the software that powers modern drone technology.
The Bootloader’s Place in the Drone Ecosystem
The bootloader, though often unseen by the end-user, is a cornerstone of drone operation. It’s the unseen architect that meticulously prepares the drone’s sophisticated systems for flight, ensuring that the right software is loaded and that the hardware is ready for the demanding tasks ahead.
Bridging Hardware and Software
At its core, the bootloader is the crucial intermediary that bridges the gap between the drone’s physical components and the intelligent software that controls it. When you power on your drone, it’s the bootloader that initiates the conversation between the processor, memory, sensors, and communication modules. It orchestrates the initial setup, making sure every piece of hardware is ready to receive instructions from the flight controller software. Without this initial choreography, the complex algorithms that keep a drone stable, navigate it through the air, and respond to your commands would have no foundation to run on.
Foundation for Autopilots and Flight Control
The bootloader’s most direct impact is on the flight controller and its associated autopilot software. Whether it’s a sophisticated flight management system like PX4 or a nimble racing firmware like Betaflight, the bootloader is responsible for loading this critical software into memory. This means that the specific characteristics of your drone’s flight – its responsiveness, its ability to hold position, its agility in acrobatic maneuvers – are all indirectly influenced by the bootloader’s ability to correctly load and execute the chosen autopilot firmware. Any issues with the bootloader can prevent the autopilot from starting, rendering the drone unflyable.
Enabling Updates and Maintenance
The bootloader also plays a vital role in the lifecycle of a drone, particularly concerning firmware updates and maintenance. As mentioned, bootloaders often facilitate entering special modes, such as DFU mode, which are essential for flashing new firmware. This allows drone owners and technicians to update the drone’s software to gain new features, improve performance, or fix bugs. In the event of a failed firmware update, a well-designed bootloader can provide a recovery path, often allowing the user to re-flash the firmware through a direct connection. This robustness is crucial for ensuring that drones remain operational and up-to-date throughout their service life. The ability for a bootloader to even undergo its own secure, OTA updates further solidifies its importance in the long-term maintenance and security of complex drone systems.