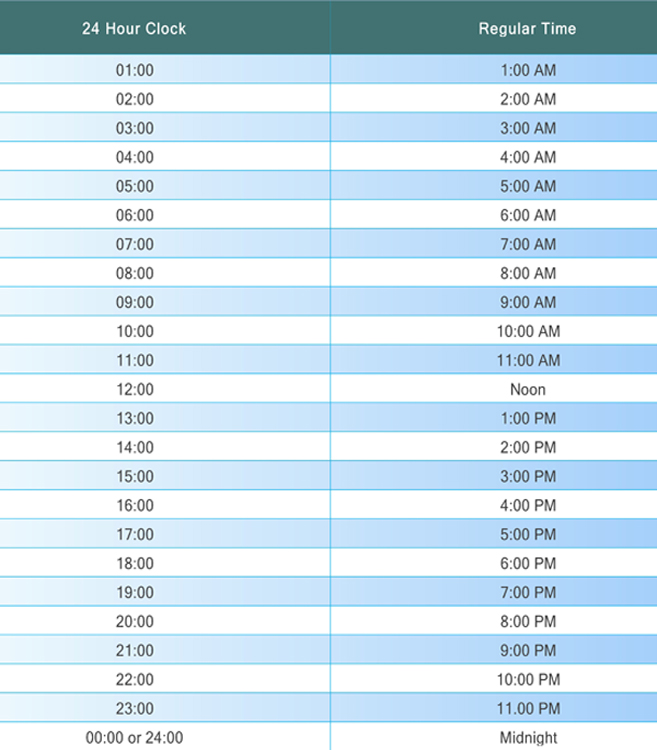
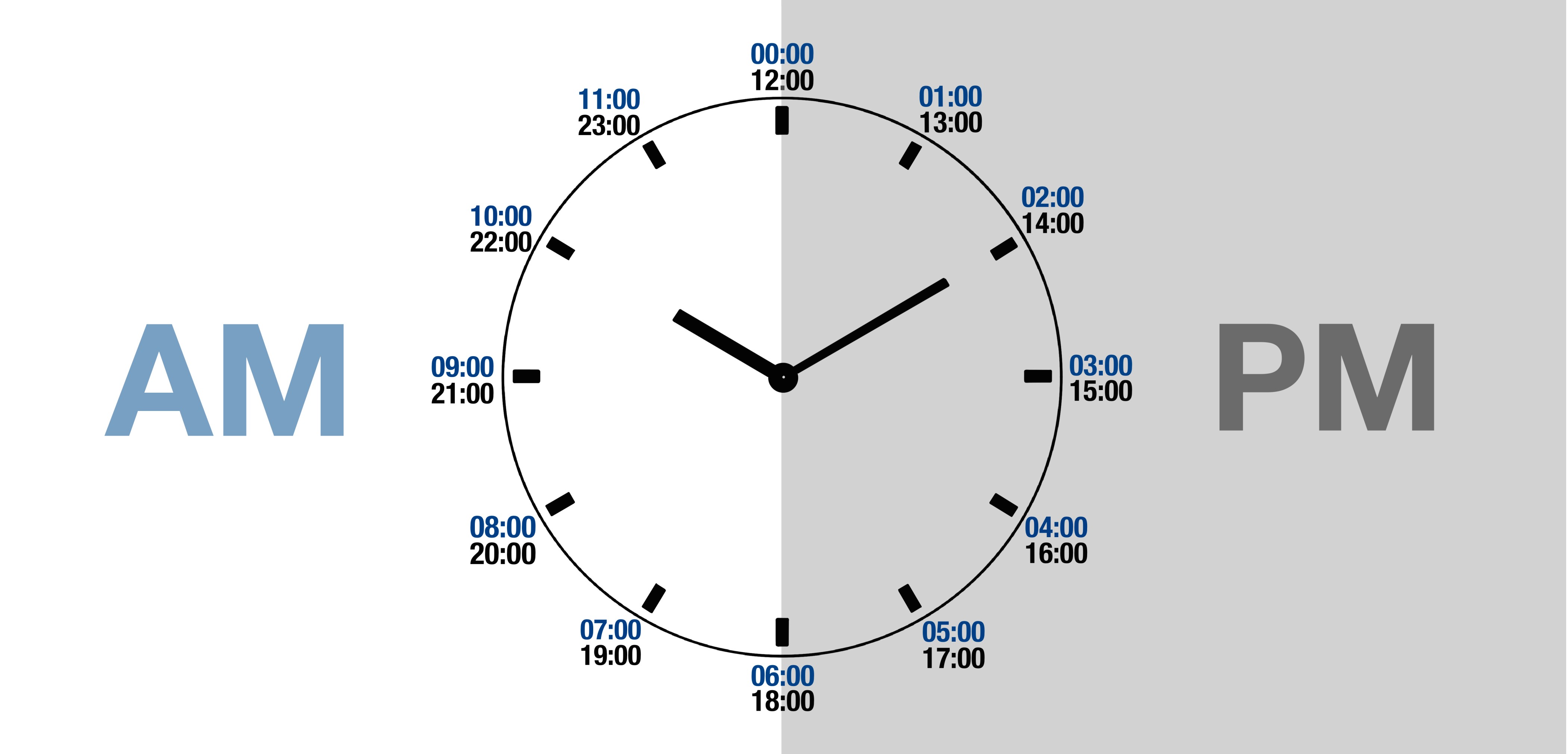
In the context of standard daily life, 18:00 is easily translated to 6:00 PM. While most people navigate their schedules using the 12-hour clock, the world of aviation and drone flight technology operates on a fundamentally different temporal foundation. For a drone pilot, a flight technician, or an aerospace engineer, “regular time” is an insufficient metric. Instead, the 24-hour clock—often referred to as military time or, more accurately in a technical sense, Coordinated Universal Time (UTC)—serves as the backbone for navigation, data synchronization, and autonomous systems.
Understanding that 18:00 is 6:00 PM is only the first step. In flight technology, this specific timestamp is part of a complex ecosystem where precision is measured in milliseconds. From the internal oscillators in a flight controller to the global satellite constellations that provide positioning data, time is the invisible thread that holds aerial operations together.
The 24-Hour Format and Aviation Standardization
The use of the 24-hour clock in flight technology is not a matter of preference; it is a necessity for safety and clarity. When a drone’s flight controller logs an event at 18:00, there is zero ambiguity. In a 12-hour system, the distinction between AM and PM introduces a critical failure point. A misinterpreted timestamp in a flight log or a mission schedule could lead to catastrophic airspace conflicts or data corruption.
Eliminating Ambiguity in Flight Logs
Flight logs are the “black box” of the drone world. They record every movement, motor output, and sensor reading. These logs utilize the 24-hour format to ensure that sequential data is indexed correctly over long durations. If a drone is performing an endurance test that spans from the afternoon into the evening, a 12-hour clock would reset at 12:00, potentially causing software errors in time-series analysis. By using 18:00, the system maintains a linear progression that is essential for post-flight telemetry review.
Global Coordination and UTC
In professional drone operations, particularly those involving long-range (BVLOS) flights or international projects, 18:00 is rarely viewed in isolation from a time zone. Most flight technology defaults to UTC (Z-time). This means that whether a drone is flying in London, New York, or Tokyo, the onboard systems are synchronized to the same global heartbeat. When a technician asks, “What is 18:00 in regular time?” they are often seeking the local translation of a UTC event to coordinate with ground crews or visual observers.
GPS and Temporal Synchronization in Navigation Systems
At the heart of modern drone flight technology is the GNSS (Global Navigation Satellite System) receiver. To the average user, GPS provides a location on a map. To the flight engineer, GPS is essentially a highly precise clock. The ability of a drone to hover in a specific coordinate at 18:00 depends entirely on its ability to calculate the time it takes for signals to travel from satellites to the receiver.
The Physics of Time of Flight (ToF)
GPS satellites carry atomic clocks that are accurate to within nanoseconds. A drone’s navigation system calculates its position by measuring the “Time of Flight” of signals sent from these satellites. Because light travels at approximately 300,000 kilometers per second, even a microsecond error in the clock can result in a positioning error of hundreds of meters. Therefore, when a drone registers the time as 18:00:00.000, it is performing a complex synchronization task that aligns its internal quartz oscillator with the atomic standards in orbit.
Relativistic Time Dilatation in Satellite Systems
An interesting aspect of flight technology is the accounting for Einstein’s theories of relativity. Because GPS satellites move at high speeds and are further from Earth’s gravity, their clocks tick differently than those on the ground. Flight technology must incorporate these relativistic offsets to ensure that when the drone reports a time of 18:00, it remains perfectly synchronized with the ground control station. This level of precision is what allows for the millimetric accuracy seen in RTK (Real-Time Kinematic) positioning systems used in surveying and autonomous mapping.
Data Integration and Sensor Fusion at 18:00
A drone is a flying sensor platform. At any given second—such as exactly 18:00—a drone may be processing data from an Inertial Measurement Unit (IMU), a barometer, a compass, and a LiDAR sensor. For the flight technology to work, all these inputs must be “time-stamped” with incredible accuracy.

The Importance of High-Frequency Time-Stamping
Inside the flight controller, the CPU runs a loop that might execute 400 to 8,000 times per second (4kHz to 8kHz). When the clock hits 18:00, the system isn’t just recording the hour; it is organizing thousands of data packets. This is known as sensor fusion. If the IMU reports a tilt at 18:00:00.001 and the GPS reports a position shift at 18:00:00.005, the stabilization algorithm must reconcile these two data points across that tiny temporal gap to maintain steady flight.
Obstacle Avoidance and Temporal Latency
Temporal precision is also the guardian of obstacle avoidance. When a drone’s vision system or ultrasonic sensors detect a wall, the flight technology calculates the “time to impact.” If there is latency in the system—meaning the “regular time” of the processor is lagging behind the “real time” of the environment—the drone will fail to react. Professional-grade drones ensure that the processing of environmental data at 18:00 happens in near-zero latency, allowing the stabilization system to execute an evasive maneuver before the clock ticks to 18:00:01.
Mission Planning: Converting 18:00 for Aerial Operations
While the machines operate on 24-hour precision, human operators must often translate 18:00 back into “regular time” to account for environmental factors like lighting, battery performance, and regulatory windows.
The Golden Hour and Battery Thermals
In the context of flight technology, 18:00 is a significant marker for battery management. Depending on the latitude and season, 18:00 (6:00 PM) often coincides with the “Golden Hour” or the transition to civil twilight. As the sun sets, ambient temperatures drop, which directly affects the chemical performance of Lithium Polymer (LiPo) batteries. Flight technology systems often include smart battery monitors that adjust voltage sag predictions based on the time of day and external temperature sensors, ensuring that a drone launched at 18:00 has a calculated return-to-home (RTH) path that accounts for cooling air.
Regulatory Compliance and Night Flight
In many jurisdictions, the transition from “day” to “night” for drone operations is defined by civil twilight, which often begins shortly after 18:00 in various regions. Flight technology now incorporates automated geofencing and “time-fencing.” A drone may be programmed to refuse takeoff or to automatically activate its anti-collision strobe lights once the onboard clock hits 18:00, ensuring the operator stays within the legal bounds of “regular time” as defined by aviation authorities like the FAA or EASA.
The Future of Temporal Precision in Autonomous Swarms
As we move toward a future of autonomous drone delivery and swarming technology, the question “What is 18:00 in regular time?” becomes even more complex. In a swarm, hundreds of drones must share a unified temporal reality to avoid mid-air collisions.
Network Time Protocol (NTP) and PTP in Drones
Modern autonomous drones are beginning to use Precision Time Protocol (PTP) over local networks to synchronize their clocks to within sub-microsecond levels. This allows them to move as a single unit. If the “regular time” for the swarm is 18:00, every drone in that swarm is executing its pre-programmed flight path with a level of synchronization that makes them appear like a single organism. This is the pinnacle of flight technology: the ability to turn a simple timestamp into a coordinated, multi-agent maneuver.
AI and Predictive Temporal Modeling
Artificial Intelligence is now being integrated into flight controllers to predict future states based on historical time data. By analyzing logs from previous flights at 18:00—accounting for typical wind patterns, satellite visibility, and signal interference at that specific time of day—AI-driven flight systems can proactively adjust their stabilization parameters. This means the drone isn’t just reacting to the present; it is using the precision of the 24-hour clock to anticipate the environmental challenges of the next minute.
In summary, while the casual observer sees 18:00 as merely 6:00 PM, the world of flight technology sees it as a critical nexus of data, navigation, and safety. The transition from regular time to the 24-hour format is the first step in entering a professional landscape where time is not just a measure of the day, but a fundamental component of the technology that allows us to master the skies.