In the realm of drone technology, particularly within the intricate systems that govern flight and navigation, the term “modulus” might appear in technical discussions, code snippets, or data readouts. While not a term commonly encountered by the casual drone enthusiast, understanding its meaning is crucial for anyone delving deeper into the engineering and software that make modern drones operate. This article aims to demystify the concept of modulus, explaining its fundamental mathematical principles and illustrating its practical applications within drone flight technology.
The Mathematical Foundation of Modulus
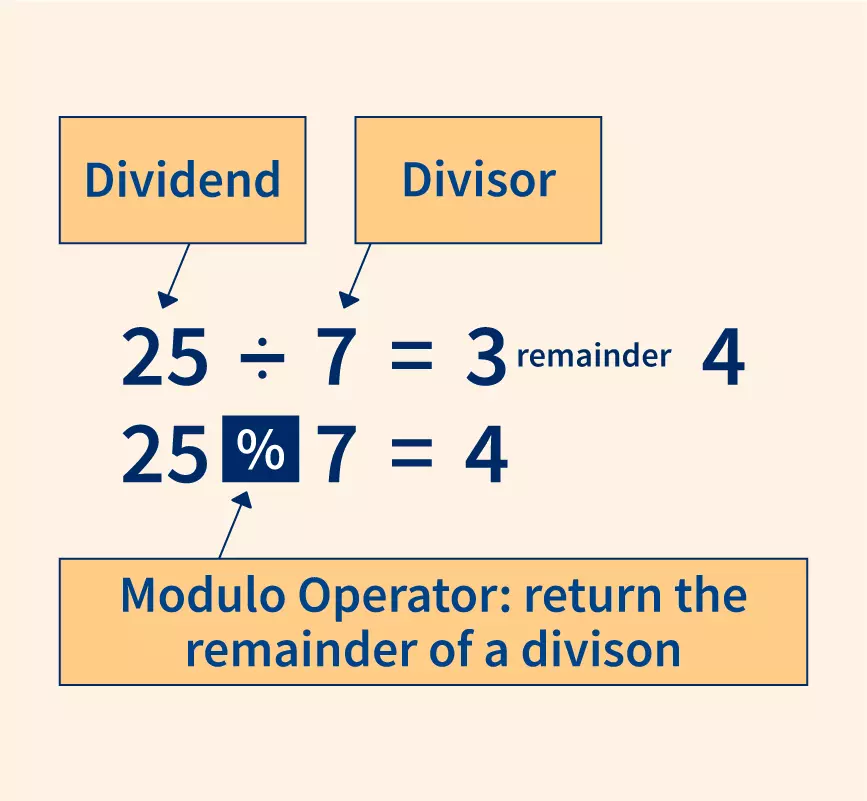
At its core, modulus, often represented by the modulo operator (%), is a mathematical operation that deals with remainders. When we divide one integer (the dividend) by another integer (the divisor), we get a quotient and a remainder. The modulus operation specifically returns this remainder.
Integer Division and Remainders
Consider the simple division of 10 by 3.
10 ÷ 3 = 3 with a remainder of 1.
In this case, 10 is the dividend, 3 is the divisor, 3 is the quotient, and 1 is the remainder.
The modulus operation, 10 % 3, would yield 1.
Let’s explore a few more examples:
- 7 % 3 = 1 (7 divided by 3 is 2 with a remainder of 1)
- 12 % 5 = 2 (12 divided by 5 is 2 with a remainder of 2)
- 8 % 4 = 0 (8 divided by 4 is 2 with a remainder of 0)
This last example is significant: when a number is perfectly divisible by another, the remainder, and therefore the modulus, is zero.
Modulus with Negative Numbers
The behavior of the modulus operator with negative numbers can vary slightly depending on the programming language or mathematical convention. However, the most common interpretation, especially in computer science contexts relevant to drones, is that the sign of the remainder typically matches the sign of the dividend.
For example:
- -10 % 3 = -1 (In many languages, the result is -1, reflecting the negative dividend)
- 10 % -3 = 1 (The result is 1, reflecting the positive dividend)
- -10 % -3 = -1 (The result is -1, reflecting the negative dividend)
It’s important to be aware of these nuances when working with software that might handle negative values, though in many drone navigation contexts, values are often normalized or kept positive.
The Concept of Congruence
The modulus operation is closely related to the mathematical concept of modular arithmetic, specifically congruence. Two integers, ‘a’ and ‘b’, are said to be congruent modulo ‘n’ if they have the same remainder when divided by ‘n’. This is written as:
$a equiv b pmod n$
This means that $(a – b)$ is a multiple of $n$. In essence, ‘a’ and ‘b’ “wrap around” or cycle when considered in terms of division by ‘n’. For instance, 7 and 10 are congruent modulo 3, because both leave a remainder of 1 when divided by 3. $7 equiv 10 pmod 3$.
Practical Applications in Drone Flight Technology
The seemingly simple mathematical concept of modulus finds surprisingly diverse and critical applications within the sophisticated flight technology that powers modern drones. From sensor data processing to control system logic, its ability to handle cyclical data, normalize values, and implement specific algorithms makes it an indispensable tool.
Sensor Data Normalization and Filtering
Drones are equipped with a multitude of sensors, each generating data that needs to be interpreted and utilized by the flight controller. Many sensor readings are inherently cyclical or bounded.
Angle and Heading Representation
Angles are a prime example. A drone’s orientation might be represented by Euler angles (roll, pitch, yaw), where the yaw angle, for instance, typically ranges from 0 to 360 degrees (or -180 to +180 degrees). When a drone completes a full rotation, its yaw might go from 350 degrees to 10 degrees.
Using the modulus operator can help normalize these angles. For example, if a calculation results in a yaw angle of 370 degrees, applying the modulus operator with 360 ($370 pmod{360}$) will correctly yield 10 degrees. This ensures that the flight controller always receives angles within the expected range, preventing errors in control logic. Similarly, if a drone’s yaw goes from -20 degrees to 10 degrees, and the desired range is 0-360, we can normalize this. A common method involves:
$(angle + 360) pmod{360}$
This ensures that negative angles are correctly mapped into the positive range.
Compass Readings

The magnetic compass (magnetometer) on a drone provides heading information, which is also cyclical (0-360 degrees). When the drone turns, the heading value naturally wraps around. The modulus operator can be used to keep the heading within its expected range, ensuring consistency for navigation algorithms.
Control System Logic and PID Controllers
Proportional-Integral-Derivative (PID) controllers are ubiquitous in drone stabilization systems. They work by continuously calculating an “error” value – the difference between a desired setpoint and a measured process variable – and applying a correction based on the proportional, integral, and derivative of this error.
Error Wrapping and Deadband Management
In some PID control scenarios, particularly those involving cyclical variables like angular position or velocity, the error itself might need to be handled in a modular fashion. For instance, if the desired yaw is 10 degrees and the current yaw is 350 degrees, the direct difference is -340 degrees. However, the actual shortest angular distance is 20 degrees (going forward from 350 to 360, then to 10).
Using the modulus operator can help calculate the correct, shortest angular error. If desired_angle and current_angle are the values, the error can be calculated as:
error = (desired_angle - current_angle + 180) % 360 - 180
This formula ensures the error is always within the range of -180 to +180 degrees, representing the most direct path.
Moreover, modulus can be used to implement “deadbands” in control systems. A deadband is a range around a setpoint where no control action is taken, preventing constant small adjustments that can wear out actuators or consume unnecessary power. For example, if a drone’s altitude is supposed to be 100 meters, and the actual altitude is between 99.5 and 100.5 meters, the control system might do nothing. Modulus can be incorporated into logic that checks if the current value falls within such a cyclical deadband.
Navigation and Path Planning
In more advanced navigation systems, especially those involving waypoint navigation or complex trajectory planning, the modulus operator can play a role in handling periodic events or ensuring continuous movement.
Waypoint Cycling
Imagine a drone programmed to follow a series of waypoints in a loop. After visiting the last waypoint and returning to the first, the sequence needs to reset. If there are ‘N’ waypoints, and the drone is currently at waypoint index ‘i’, the next waypoint index can be calculated as $(i + 1) pmod N$. This ensures that when ‘i’ is the index of the last waypoint (N-1), the next index correctly wraps around to 0.
Geographic Coordinate Wrapping
While less common due to the complexity of spherical geometry, in simplified models or specific algorithms dealing with positions on a sphere (like the Earth), modulus operations might be conceptually applied to handle longitude wrapping around the 180-degree meridian. However, dedicated geospatial libraries usually handle these complexities with more robust algorithms.
Frequency and Timing Operations
The modulus operator is fundamental in algorithms that involve timing, synchronization, and periodic tasks, which are essential for the coordinated operation of a drone’s systems.
Timer Rollover and Periodic Tasks
Many embedded systems within a drone use timers that count up. When a timer reaches its maximum value, it “rolls over” back to zero. Understanding this rollover behavior is crucial for accurate timekeeping. The modulus operator can be used to calculate elapsed time since the last rollover or to determine if a specific time interval has passed. For instance, if a task needs to run every 100 milliseconds, and the system timer ticks every 1 millisecond, the task execution can be triggered when system_timer_value % 100 == 0.
Signal Processing and Pattern Recognition
In signal processing for sensor fusion or advanced perception, modulus operations can be used in algorithms for feature extraction or pattern matching where cyclical patterns are identified. For example, in analyzing repetitive signals from sensors, modulus can help align or synchronize observed patterns with known templates.
State Machines and Mode Transitions
Drone flight controllers often operate based on state machines, where the drone can be in various modes (e.g., armed, flying, landing, RTL – Return to Launch). Transitions between these states are governed by specific conditions. The modulus operator can be implicitly or explicitly used in the logic that determines these transitions, especially in scenarios where state indices or counters need to cycle.
For example, if a drone has a sequence of pre-flight checks that must be completed in order, and there are ‘M’ checks, the system might advance through them using modulo arithmetic for the check index.
Conclusion
The modulus operator, a seemingly straightforward mathematical concept, is a powerful and versatile tool deeply embedded within the complex architecture of drone flight technology. From ensuring that sensor readings remain within expected bounds to orchestrating precise control algorithms and managing cyclical navigation sequences, its ability to handle remainders and cyclic behavior is indispensable. For engineers, software developers, and even advanced drone enthusiasts who wish to understand the inner workings of their aircraft, grasping the meaning and applications of modulus provides a critical insight into the robustness and sophistication of modern unmanned aerial vehicles. It is a testament to how fundamental mathematical principles underpin cutting-edge technological advancements.