The concept of “mean” is a fundamental statistical measure, and when applied to frequency, it provides crucial insights into the typical behavior or central tendency of a dataset. In the context of flight technology, understanding frequency distributions and their means is paramount for optimizing system performance, diagnosing anomalies, and ensuring the reliability of sophisticated equipment. This exploration delves into the various interpretations of “mean” in relation to frequency, specifically within the domain of flight technology, encompassing navigation, stabilization systems, GPS, sensors, and obstacle avoidance.
Understanding Frequency Distributions in Flight Technology
Before dissecting the “mean,” it’s essential to grasp what frequency distributions represent in flight technology. A frequency distribution is a tabular or graphical depiction of the number of times each distinct value or range of values occurs in a dataset. In our context, these datasets can represent a multitude of parameters: the rate of change in pitch or roll, the intensity of sensor readings, the number of GPS signal lock failures per hour, or the frequency of corrections applied by a stabilization system.

Types of Frequency Distributions
Several types of frequency distributions are relevant:
- Discrete Frequency Distribution: Used when data can only take on a finite number of distinct values. For instance, the number of sensor anomalies detected per flight segment.
- Continuous Frequency Distribution: Employed when data can take any value within a given range, such as the continuous variation in altitude readings or the fluctuating output of a gyroscopic sensor. This often involves grouping data into bins or intervals.
- Normal Distribution (Gaussian Distribution): A bell-shaped curve, often considered the ideal in many natural phenomena. In flight technology, many sensor readings and system responses tend to approximate a normal distribution under stable conditions. Deviations from this can signal issues.
- Skewed Distributions: Where the data is not symmetrically distributed around the mean. A left-skewed distribution has a longer tail to the left, while a right-skewed distribution has a longer tail to the right. This can indicate biased sensor performance or unusual flight dynamics.
Why Frequency Matters in Flight Technology
The frequency of events or measurements directly impacts how we interpret the performance and health of flight systems. High frequency of minor corrections in a stabilization system might indicate sensitivity issues or external turbulence. Low frequency of GPS signal reacquisition could point to environmental interference or antenna problems. Understanding the patterns of these frequencies allows engineers and operators to:
- Establish Baselines: Define what “normal” looks like for system parameters.
- Detect Deviations: Identify when performance drifts outside expected ranges.
- Predict Failures: Recognize trends that might precede component failure.
- Optimize Performance: Fine-tune algorithms and parameters for improved accuracy and efficiency.
Defining “Mean” in the Context of Frequency
The term “mean” itself, in statistics, typically refers to the arithmetic mean, which is the sum of all values divided by the number of values. However, when discussing frequency distributions, the “mean” can take on several specific forms, each offering a different perspective on the central tendency of the data.
The Arithmetic Mean of a Frequency Distribution
This is the most straightforward interpretation. If we have a set of measurements (e.g., pitch error readings) and their frequencies, we can calculate the arithmetic mean of these readings.
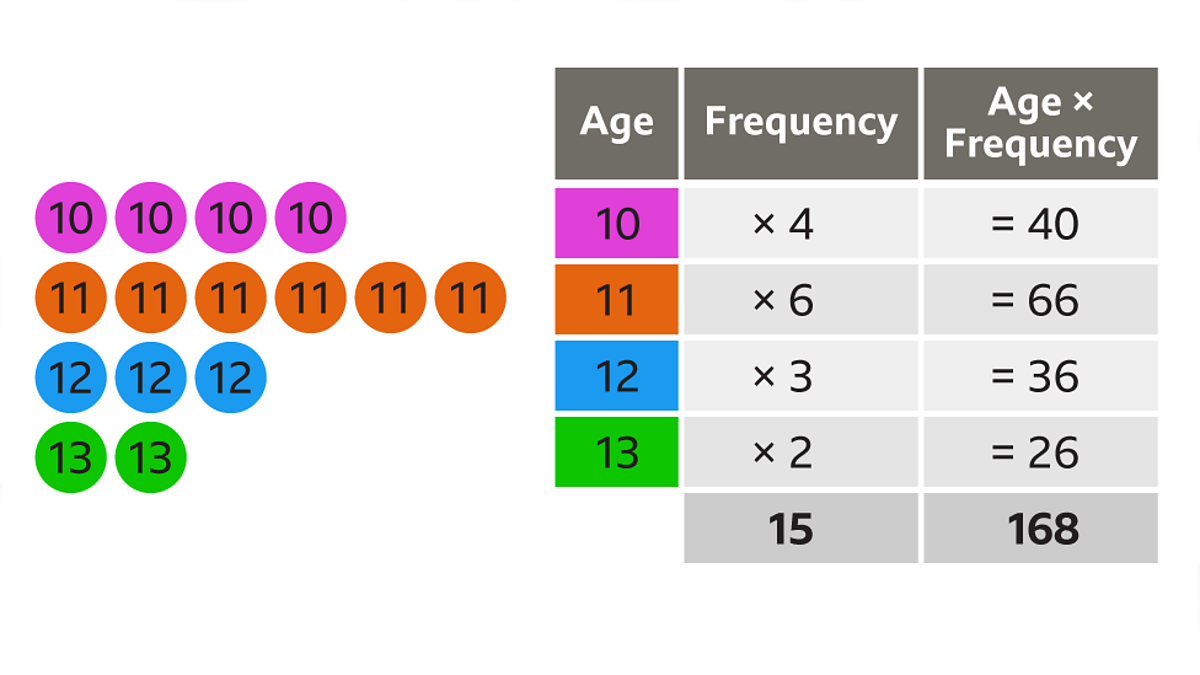
Let $xi$ be the observed value and $fi$ be its frequency. The arithmetic mean ($bar{x}$) is calculated as:
$$ bar{x} = frac{sum (xi times fi)}{sum f_i} $$
In flight technology, the arithmetic mean of sensor readings, for example, provides the average value observed over a period. If the average pitch error is consistently close to zero, it suggests good system calibration. A significant non-zero mean pitch error indicates a persistent bias that needs correction. Similarly, the mean response time of an obstacle avoidance system to detected objects is a critical performance metric.
The Mean Frequency (Average Frequency)
This term can also refer to the average rate at which a particular event occurs over a specified period. For instance, if a drone’s navigation system experiences a GPS dropout $N$ times in $T$ hours, the mean frequency of dropout is $N/T$ dropouts per hour.
This is particularly relevant for understanding the reliability and stability of systems:
- Mean Frequency of Sensor Glitches: How often does a specific sensor provide erroneous data?
- Mean Frequency of Stabilization Adjustments: How frequently does the flight controller need to make corrections to maintain attitude?
- Mean Frequency of Communication Loss: How often does the control link between the drone and the operator drop?
Calculating this often involves defining an “event” and then counting its occurrences over time. The average of these counts divided by the total time gives the mean frequency. This metric is vital for probabilistic risk assessments and setting operational limits.
The Weighted Mean
In certain scenarios, not all data points or frequencies are equally important. A weighted mean assigns different weights to different values, reflecting their relative significance.
Let $xi$ be the observed value and $wi$ be its corresponding weight. The weighted mean is:
$$ bar{x}w = frac{sum (xi times wi)}{sum wi} $$
In flight technology, weights might be assigned based on:
- Time Sensitivity: More recent readings might be given higher weights in a moving average calculation for a stabilization system, giving more importance to current state.
- Criticality: The frequency of errors in a critical navigation sensor might be weighted more heavily than those in a less critical environmental sensor.
- Confidence Level: If a system provides a confidence score for its readings, a weighted mean could incorporate this, giving more influence to readings with higher confidence.
Other Measures of Central Tendency (and why they are related to “mean”)
While “mean” strictly refers to the arithmetic average, understanding other measures of central tendency is often necessary when analyzing frequency distributions, as they provide complementary insights, especially when distributions are not normal.
- Median: The middle value in a dataset when arranged in order. In a perfectly symmetrical distribution, the median equals the mean. However, in skewed distributions, the median provides a more robust measure of the “typical” value, as it is not affected by extreme outliers. For instance, if a sensor occasionally provides extremely high readings, the median of those readings would better represent the typical sensor output than the mean, which would be pulled higher.
- Mode: The value that occurs most frequently in a dataset. In a frequency distribution, the mode is the peak of the distribution. For continuous data grouped into bins, the mode is the midpoint of the bin with the highest frequency. The mode is particularly useful for identifying common operational states or prevalent types of sensor noise.
When analyzing complex frequency data from flight systems, comparing the mean, median, and mode can reveal important characteristics of the data’s distribution and highlight potential issues.
Applications of “Mean” in Flight Technology Systems
The concept of “mean” applied to frequency is a cornerstone of performance analysis, diagnostics, and algorithm design across various flight technology domains.
Navigation Systems
- Mean Position Error: Calculated from a series of position fixes, this indicates the average deviation from the true position. Analyzing the frequency distribution of these errors helps in understanding the noise characteristics of GPS receivers, inertial navigation systems (INS), or fused navigation solutions.
- Mean Time Between Fixes (MTBF) for GPS: This measures the average duration between successful GPS signal acquisitions after a loss. A low MTBF suggests frequent signal interruptions, requiring the system to rely more heavily on other navigation sources or potentially leading to navigation uncertainty.
- Mean Drift Rate of IMUs: Inertial Measurement Units (IMUs) are prone to drift over time. Analyzing the frequency of these drift rates helps in calibrating and compensating for their inaccuracies, especially when used for dead reckoning.
Stabilization Systems
- Mean Attitude Deviation: The average deviation of the aircraft’s pitch, roll, or yaw from the commanded attitude. This is a primary indicator of the stabilization system’s effectiveness. Analyzing the frequency of these deviations helps in tuning PID controllers and understanding the impact of external factors like wind gusts.
- Mean Control Surface Deflection Frequency: How often and by how much control surfaces (e.g., ailerons, elevators) are adjusted to maintain stability. A high mean frequency of small adjustments might indicate a responsive system, while a low mean frequency of large adjustments could suggest sluggishness or a system reacting to significant disturbances.
- Mean Angular Velocity: The average rate of rotation around each axis. This helps in characterizing normal flight maneuvers and identifying unexpected or excessive rotations that might signal a loss of control or a system malfunction.
Sensor Fusion and Data Processing
- Mean Sensor Reading: Across multiple redundant sensors measuring the same parameter (e.g., altitude), the mean provides a robust estimate, especially when outliers are present. Analyzing the frequency distribution of differences between sensors helps identify faulty units.
- Mean Data Latency: The average time delay between when data is generated by a sensor and when it is processed by the flight controller. High latency can degrade the performance of real-time control loops.
- Mean Error Rate of Optical Flow/Visual Odometry: For drones relying on visual sensors for navigation, the mean error rate quantifies how accurately these systems track movement. Analyzing the frequency of tracking failures is crucial for determining operational reliability.
Obstacle Avoidance Systems
- Mean Detection Range: The average distance at which obstacles are reliably detected by the sensor suite. Understanding the frequency distribution of detection ranges under various conditions is key to setting safe operating parameters.
- Mean Time to React: The average time elapsed between an obstacle being detected and the avoidance maneuver being initiated. This is a critical safety metric.
- Mean Frequency of False Positives/Negatives: How often does the system incorrectly flag an obstacle (false positive) or fail to detect a real one (false negative)? Analyzing the frequency of these events helps refine the detection algorithms and reduce unnecessary evasive actions or dangerous omissions.
Advanced Considerations: Mean in Dynamic and Probabilistic Systems
In highly dynamic flight environments, understanding the “mean” frequency becomes even more nuanced.
Moving Averages and Exponential Smoothing
For systems that need to react to current conditions, a simple arithmetic mean over a long period might be too slow. Moving averages and exponential smoothing techniques provide a “mean” that is more responsive to recent data. These methods essentially assign exponentially decreasing weights to older data points, ensuring that the calculated mean reflects the most up-to-date state of the system. This is crucial for real-time control loops in stabilization and navigation.
Probabilistic Mean and Expectation
In situations where outcomes are uncertain, the “mean” can be interpreted as the expected value. For instance, the expected number of system failures per flight hour, derived from the frequency of past failures, is a probabilistic mean. This expectation is foundational for risk assessment, maintenance scheduling, and defining operational margins.

Frequency Domain Analysis
Beyond simple frequency counts, flight technology often employs Fourier analysis and other frequency domain techniques. Here, “frequency” refers to oscillations or signal components at specific rates. The “mean” in this context might refer to the average amplitude of a specific frequency component over time, indicating the strength of a particular oscillation in the system’s response or external environmental influences (like rotor vibrations).
In conclusion, the interpretation of “mean” in relation to frequency within flight technology is multifaceted. It ranges from the straightforward arithmetic average of observed values to the average rate of events, weighted averages considering importance, and probabilistic expectations. A deep understanding of these concepts is indispensable for designing, validating, and operating the complex and safety-critical systems that enable modern aerial vehicles. By meticulously analyzing frequency distributions and their associated means, engineers can ensure the robustness, accuracy, and reliability of navigation, stabilization, sensing, and avoidance technologies, paving the way for safer and more capable flight operations.