What Does σ Mean in Drone Flight Technology?
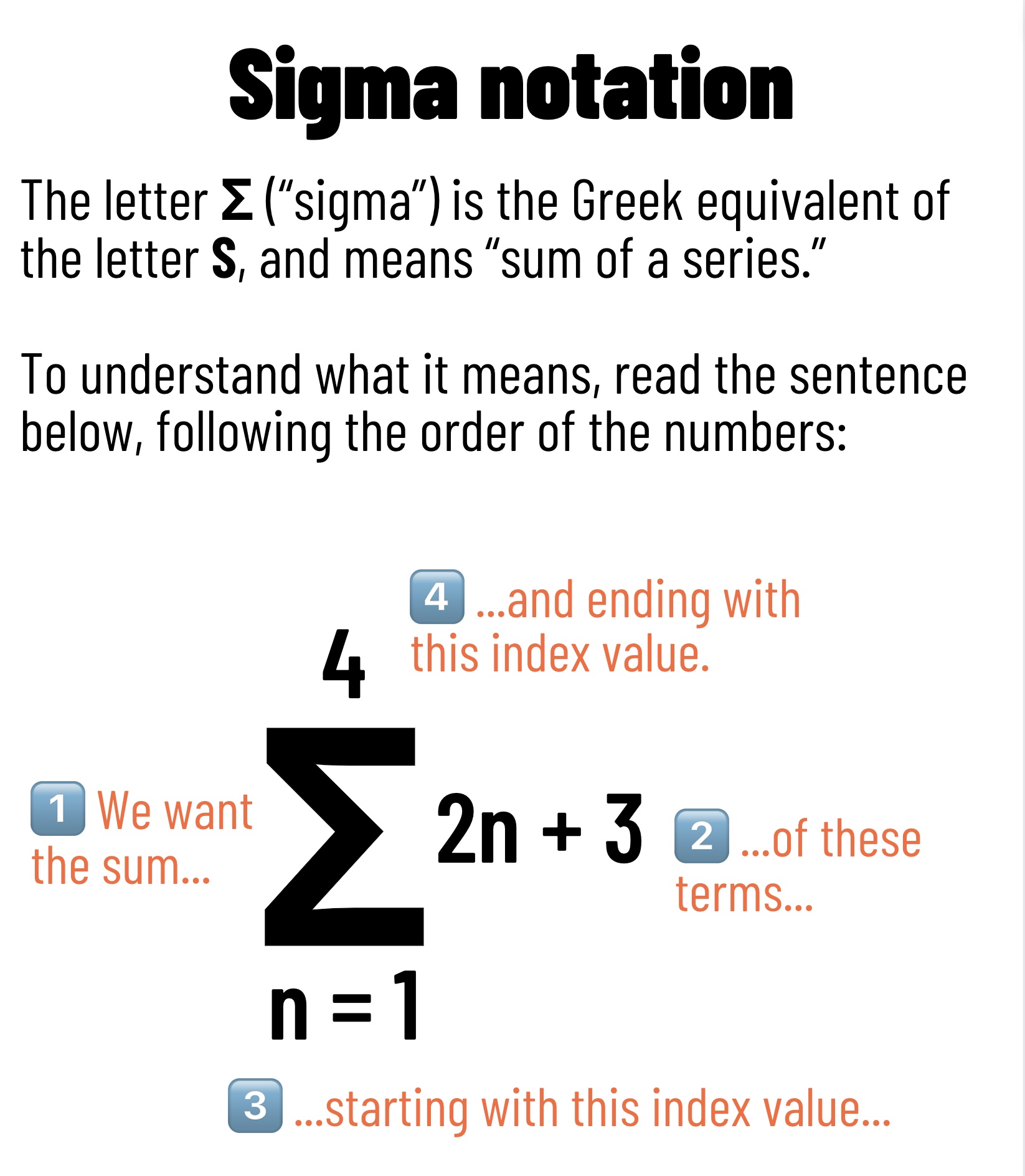
The Greek letter sigma (σ) is a symbol laden with diverse meanings across scientific and engineering disciplines. While it can denote summation, stress, electrical conductivity, or even the Stefan-Boltzmann constant in various contexts, within the intricate world of drone flight technology, ‘σ’ most frequently refers to standard deviation. This statistical measure is not merely an abstract mathematical concept; it is a critical underpinning for understanding, quantifying, and optimizing the precision, accuracy, and reliability of every component contributing to a drone’s ability to navigate, stabilize, and perform complex tasks autonomously.
In the realm of advanced flight systems, where split-second decisions and millimeter-level accuracy can differentiate between mission success and failure, a deep comprehension of variability and uncertainty is paramount. Standard deviation, symbolized by σ, provides a robust framework for assessing the consistency of sensor readings, the repeatability of control inputs, and the overall robustness of a drone’s operational parameters. It empowers engineers and operators to move beyond mere functionality, delving into the nuances of performance that define true technological excellence. This article will explore the profound significance of σ within drone flight technology, illuminating its impact on navigation, stabilization, and the future of autonomous aerial systems.
The Statistical Significance of σ: Understanding Precision and Accuracy
At its heart, drone flight technology is a complex interplay of hardware, software, and real-world environmental variables. Sensors collect data, processors interpret it, and actuators execute commands. The quality of this entire chain is heavily dependent on the reliability of the initial data, and this is precisely where the concept of standard deviation becomes indispensable.
Standard Deviation: The Core Concept
Statistically, the standard deviation (σ) is a measure of the amount of variation or dispersion of a set of values. A low standard deviation indicates that the data points tend to be close to the mean (also called the expected value) of the set, while a high standard deviation indicates that the data points are spread out over a wider range.
Imagine a drone’s GPS receiver reporting its position repeatedly while stationary. Due to inherent noise, signal interference, and other factors, each reported coordinate will likely be slightly different. The standard deviation of these reported positions provides a quantifiable metric of how “noisy” or “scattered” the GPS readings are. A smaller σ value signifies tighter clustering around the actual position, indicating higher precision. For engineers designing and evaluating drone systems, understanding this variability is crucial for setting performance expectations and designing robust control algorithms. It moves the assessment beyond a simple “does it work?” to “how consistently and reliably does it work under varying conditions?”
Precision vs. Accuracy in Drone Systems
It’s vital to distinguish between precision and accuracy when discussing standard deviation.
- Accuracy refers to how close a measurement is to the true or actual value. A drone’s altimeter might be accurate if, on average, it reports the correct altitude.
- Precision refers to how close repeated measurements are to each other. A drone’s altimeter is precise if its readings are consistently similar, even if they are all slightly off the true altitude.
Standard deviation (σ) is fundamentally a measure of precision. A system with a low σ is highly precise, meaning its outputs are consistently close to each other. However, a highly precise system isn’t necessarily accurate. A GPS sensor could consistently report a position 5 meters south of the actual location (high precision, low accuracy). Conversely, a system could be accurate (average reading is correct) but not precise (individual readings are widely scattered).
In drone flight technology, both are critical. High precision (low σ) in sensor readings allows control systems to make consistent, predictable adjustments. High accuracy ensures the drone is where it thinks it is. Engineers strive to minimize σ while simultaneously calibrating systems to achieve the highest possible accuracy, often by understanding and compensating for systematic errors that affect accuracy, and using statistical methods like standard deviation to characterize and reduce random errors that affect precision.

σ’s Role in Drone Navigation Systems
The ability of a drone to navigate reliably from one point to another is contingent upon accurate and precise positioning information. Standard deviation plays an indispensable role in quantifying the performance limits and enabling the robustness of these complex navigation systems.
GPS and GNSS Signal Variability
Global Positioning Systems (GPS) and other Global Navigation Satellite Systems (GNSS) are cornerstones of modern drone navigation. However, satellite signals are subject to various disturbances, including atmospheric interference, signal multipath (reflections off surfaces), and intentional jamming. These factors introduce noise and variability into position estimates.
The standard deviation of GPS/GNSS position fixes provides a direct measure of the system’s precision under specific conditions. A drone manufacturer might specify a horizontal position accuracy of “±1 meter (1-sigma),” meaning that approximately 68% of position fixes will fall within a 1-meter radius of the true position. A “2-sigma” rating (±2 meters) would encompass about 95% of fixes, and “3-sigma” (±3 meters) about 99.7%. Understanding these σ values allows drone operators to assess the suitability of a particular system for missions requiring high spatial accuracy, such as precision agriculture, surveying, or close-quarters inspection. Furthermore, real-time kinematic (RTK) and post-processed kinematic (PPK) GPS systems aim to drastically reduce this σ, achieving centimeter-level precision by incorporating correctional data, highlighting the constant drive to minimize variability.
Inertial Measurement Units (IMUs) and Sensor Fusion
Inertial Measurement Units (IMUs) – comprising accelerometers, gyroscopes, and often magnetometers – are vital for attitude control (pitch, roll, yaw) and short-term position estimation when GPS signals are unavailable or unreliable. Each of these sensors inherently produces noisy data. Accelerometers are susceptible to vibration and external forces, while gyroscopes suffer from drift.
Standard deviation is used to characterize the noise floor and bias stability of IMU sensors. A low σ for a gyroscope’s drift rate, for example, indicates a higher quality sensor that will maintain attitude estimates more accurately over time. In complex sensor fusion algorithms, such as Kalman filters or Extended Kalman Filters, the standard deviation of each sensor’s noise is a crucial input. These filters intelligently combine data from multiple, noisy sources (e.g., GPS, IMU, barometer, vision sensors) by weighting each input according to its estimated reliability – directly related to its σ. A sensor with a lower σ (higher precision) will be given more weight, leading to a more accurate and stable overall state estimate for the drone.
Altimeters and Vertical Precision
Barometric altimeters are common in drones for vertical positioning and altitude hold features. Their readings, however, can be affected by changes in air pressure due to weather patterns, temperature gradients, and even the drone’s own movement. The standard deviation of altimeter readings, especially during hover or slow ascent/descent, reveals the sensor’s vertical precision. For applications requiring precise altitude control, such as terrain-following or maintaining specific flight levels for photogrammetry, a small vertical σ is critical. Advanced drone systems often fuse barometric altimeter data with GPS altitude, ultrasonic sensors, or lidar, again using statistical models informed by σ to produce a more robust and precise vertical position estimate.
Enhancing Flight Stability and Control with σ
Beyond navigation, the concept of standard deviation is deeply embedded in the design and tuning of control systems that govern a drone’s stability, responsiveness, and ability to execute complex maneuvers.
PID Controllers and System Response
Proportional-Integral-Derivative (PID) controllers are ubiquitous in drone flight, responsible for maintaining stable flight characteristics like attitude, altitude, and position. They work by continuously comparing the desired state (setpoint) with the actual state (measured by sensors) and calculating an error signal to adjust motor outputs.
The effectiveness of a PID controller is heavily influenced by the quality and consistency of the sensor data it receives. If sensor readings are highly variable (high σ), the PID controller will “see” a constantly fluctuating error, leading to jittery, unstable, or over-corrective control actions. By understanding the standard deviation of sensor noise, engineers can tune the PID parameters (P, I, D gains) to effectively filter out this noise while still responding quickly to genuine changes in the drone’s state. Filtering techniques, often informed by σ, are applied to sensor data before it reaches the PID controller, ensuring a smoother, more predictable control loop and ultimately, more stable flight.
Autonomous Flight and Trajectory Planning
Autonomous flight involves complex trajectory planning, waypoint navigation, and sophisticated decision-making. The reliability of these functions hinges on the certainty of the drone’s position and orientation. When a drone plans a path, it must account for the inherent uncertainties in its sensors and control execution.
Standard deviation directly feeds into the uncertainty models used in autonomous flight algorithms. For instance, in path planning, a drone might calculate a “corridor of uncertainty” around its intended trajectory, based on the σ of its position estimates. This corridor dictates how much margin the drone needs to maintain from obstacles, ensuring that even with minor sensor errors or control discrepancies, it remains within safe bounds. A smaller σ allows for tighter, more efficient flight paths and closer inspection capabilities, crucial for precision tasks like bridge inspection or automated warehouse inventory.
Obstacle Avoidance and Reliability
Obstacle avoidance systems rely on sensors such as ultrasonic, optical, lidar, or radar to detect objects in the drone’s path. Each of these sensors has a finite range, field of view, and, critically, a specific level of noise and error, quantifiable by σ.
The standard deviation of range sensor readings directly impacts the reliability of obstacle detection and the safety margins needed for avoidance maneuvers. If a lidar sensor has a high σ for its distance measurements, the drone’s onboard intelligence must assume a larger potential error margin, forcing it to initiate avoidance actions earlier or maintain a greater distance from perceived obstacles. Conversely, a low σ allows the drone to operate with greater confidence in its surroundings, enabling more agile and efficient navigation in complex environments. This statistical understanding is crucial for developing robust fusion algorithms that combine data from multiple avoidance sensors, leveraging their individual strengths and compensating for their weaknesses based on their respective σ values to create a comprehensive and reliable environmental map.
From Raw Data to Reliable Flight: Mitigating σ’s Impact
The objective in drone flight technology is not merely to understand σ, but to actively manage and mitigate its undesirable effects to achieve the highest possible levels of reliability, precision, and safety.
Sensor Calibration and Filtering Techniques
The first step in managing σ is rigorous sensor calibration. This process aims to reduce systematic errors and characterize the random errors (noise) of each sensor. Once characterized, various filtering techniques are employed. Bayesian filters, like the ubiquitous Kalman filter and its extensions (Extended Kalman Filter, Unscented Kalman Filter), are specifically designed to estimate the true state of a system from a series of noisy measurements. These filters explicitly incorporate the standard deviation (or covariance, which is related to σ) of both the sensor noise and the process noise (uncertainty in the drone’s dynamic model) to produce an optimal state estimate. By doing so, they effectively reduce the overall σ of the fused data, providing a much cleaner and more reliable input for the control systems.
Redundancy and Error Detection
To further reduce the impact of individual sensor noise and to provide robustness against sensor failure, many advanced drones employ sensor redundancy. This means having multiple sensors of the same type (e.g., dual GPS receivers, multiple IMUs). When redundant sensors are used, their data can be cross-referenced. If one sensor exhibits an unusually high σ in its readings or deviates significantly from the others, it can be identified as potentially faulty or providing unreliable data. Statistical tests, often based on standard deviation, are used to detect these outliers, allowing the flight controller to either disregard the unreliable data or give it significantly less weight in the sensor fusion process, thereby maintaining the integrity of the flight.
Predictive Maintenance and Performance Monitoring
Monitoring the standard deviation of critical sensor readings and system parameters over time can also be a powerful tool for predictive maintenance and performance monitoring. A gradual increase in the σ of an IMU’s gyroscope readings, for example, might indicate sensor degradation due to wear, vibration, or environmental factors. Similarly, an increase in GPS position σ could signal antenna damage or interference. By tracking these statistical trends, operators can proactively service or replace components before they lead to critical failures, ensuring consistent performance and extending the operational lifespan of the drone. This shifts maintenance from reactive to predictive, a hallmark of highly reliable systems.
Conclusion
In the nuanced and demanding world of drone flight technology, the seemingly simple Greek letter σ carries profound significance. As the symbol for standard deviation, it is the fundamental quantifier of precision, variability, and reliability across all aspects of a drone’s operation, from navigation and stabilization to autonomous decision-making and obstacle avoidance. Understanding and actively managing σ is not merely an academic exercise; it is a practical necessity that underpins the development of safer, more efficient, and more capable aerial platforms.
From filtering out sensor noise in IMUs and assessing the precision of GPS signals to tuning PID controllers for stable flight and building robust obstacle avoidance systems, σ serves as a constant metric guiding engineering decisions. It empowers developers to move beyond just making drones fly, enabling them to fly with unprecedented levels of consistency, accuracy, and confidence. As drone technology continues to advance, the meticulous attention to the statistical implications of ‘σ’ will remain a cornerstone, ensuring that these remarkable machines can operate reliably in ever more complex and demanding environments.