Extrapolation, in the context of flight technology, is a crucial concept that underpins many of the sophisticated systems we rely on to navigate, control, and understand the environment our aircraft operate within. Far from being a mere academic term, extrapolation is a practical tool, a digital bridge between known data points and predictions about the unknown. It’s the engine that allows a drone to maintain stable flight in turbulent air, for a GPS to accurately estimate your position between satellite pings, and for an obstacle avoidance system to anticipate a collision before it happens.
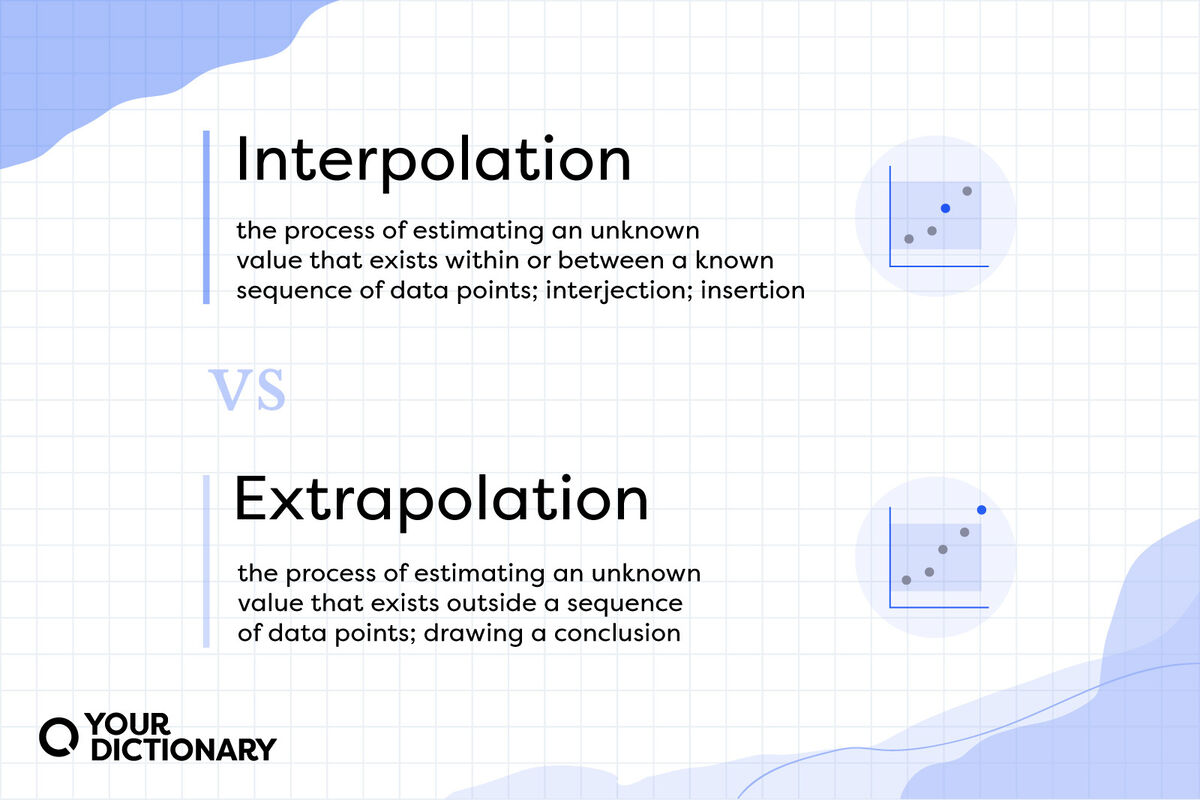
At its core, extrapolation involves inferring future values or trends based on existing data. Imagine a simple line graph. If you have two points on that graph, you can draw a line through them. Extrapolation is the act of extending that line beyond the known points to predict where other points might lie. In flight technology, this “line” is often a complex mathematical model, and the “points” are sensor readings, positional data, or flight control inputs. The further you extrapolate, the less certain your prediction becomes, a fundamental principle that drives the need for robust algorithms and frequent data updates in aviation systems.
The Foundations of Extrapolation in Flight Systems
The ability to extrapolate effectively is woven into the fabric of modern flight technology. It’s not a single feature but a foundational capability that enhances numerous subsystems, from the basic flight controller to advanced autonomous navigation. Understanding its role helps demystify how aircraft, particularly unmanned aerial vehicles (UAVs) and advanced drones, achieve their impressive levels of autonomy and precision.
Inertial Measurement Units (IMUs) and Dead Reckoning
One of the most fundamental applications of extrapolation in flight technology lies within Inertial Measurement Units (IMUs). An IMU typically comprises accelerometers and gyroscopes, which measure linear acceleration and angular velocity, respectively. While these sensors provide instantaneous changes in motion, they don’t directly offer a position or orientation over time.
This is where extrapolation, often referred to as “dead reckoning” in this context, comes into play. By integrating the acceleration data over time, the system can estimate changes in velocity, and by integrating velocity over time, it can estimate changes in position. Similarly, integrating gyroscope data allows for the estimation of changes in orientation.
However, IMUs are prone to drift. Tiny errors in measurement accumulate over time, leading to increasingly inaccurate estimations. This is where the concept of extrapolation’s uncertainty becomes critical. Without external correction, a drone relying solely on IMU-based dead reckoning would quickly lose its positional accuracy. This necessitates a constant interplay between extrapolation and other positioning technologies.
Sensor Fusion and State Estimation
To overcome the limitations of individual sensors, flight technology heavily relies on sensor fusion. This involves combining data from multiple sources—such as IMUs, GPS receivers, barometers, magnetometers, and even vision-based systems—to create a more accurate and robust estimate of the aircraft’s state (position, velocity, attitude, etc.).
Extrapolation plays a vital role in this fusion process. Algorithms like the Kalman filter and its variants (Extended Kalman Filter, Unscented Kalman Filter) are designed to predict the future state of a system based on a dynamic model and then update that prediction with new sensor measurements.
Here’s how it works conceptually:
- Prediction Step: The filter uses a model of how the aircraft is expected to behave (e.g., physics-based motion models) to extrapolate the current state to the next time step. This prediction incorporates the previous state estimate and control inputs.
- Update Step: When new sensor data arrives, the filter compares the actual measurement with the predicted measurement. The difference, known as the innovation, is used to correct the predicted state, yielding a more accurate posterior estimate.
This iterative process allows the system to continuously refine its understanding of the aircraft’s state, even when individual sensors are noisy or temporarily unavailable. The prediction step, powered by extrapolation, is essential for maintaining a coherent state estimate between updates from more reliable, but less frequent, sources like GPS.
Navigation and Path Planning
Accurate navigation and intelligent path planning are areas where extrapolation is indispensable. GPS receivers, for instance, do not provide a continuous stream of position data. Instead, they acquire fixes at a certain rate. Between these fixes, the navigation system must extrapolate the aircraft’s trajectory to maintain an accurate representation of its current position and velocity.
Consider a drone flying a pre-programmed route. The flight controller uses the current position and velocity, derived from sensor fusion including extrapolated data, to determine the necessary control commands (e.g., motor speeds) to steer the aircraft along the intended path. If the GPS signal momentarily drops, the system will continue to extrapolate the estimated position and velocity based on the IMU data and its internal motion model, allowing it to maintain course until the GPS signal is reacquired.
Moreover, in dynamic environments, path planning algorithms often need to predict the future positions of both the aircraft and potential obstacles. This predictive capability, which relies on extrapolation, allows the drone to dynamically adjust its trajectory to avoid collisions or to intercept a moving target. For example, an “AI Follow Mode” feature on a camera drone extrapolates the subject’s predicted movement to ensure the drone stays in frame.
Stabilization and Control Systems
The very act of keeping a drone stable in the air is a continuous exercise in extrapolation and rapid reaction. A drone’s flight controller is constantly monitoring its attitude (pitch, roll, yaw) and altitude. If the drone encounters a gust of wind, its sensors will detect a deviation from its desired orientation.
The stabilization algorithm then needs to:
- Detect the Deviation: Sensors (gyroscopes and accelerometers) register the unwanted movement.
- Estimate the Current State: This includes understanding the current deviation and its rate of change.
- Predict the Future Trajectory: Based on the detected forces and the aircraft’s dynamics, the system extrapolates how the deviation will evolve if no corrective action is taken.
- Calculate Correction: It then calculates the necessary adjustments to the motor speeds to counteract this predicted deviation and return the aircraft to its stable state.
This process happens hundreds, if not thousands, of times per second. The extrapolation here is not about predicting far into the future, but about making very short-term predictions to enable instantaneous corrective actions. Without this rapid predictive capability, even a slight disturbance would send a drone into an uncontrolled tumble.

Advanced Applications: Obstacle Avoidance and Autonomous Flight
The most sophisticated applications of extrapolation are seen in advanced obstacle avoidance systems and fully autonomous flight. These systems often employ a combination of sensors like LiDAR, sonar, and vision systems to build a real-time 3D map of the environment.
When an obstacle is detected, the autonomous system must not only identify its current position and velocity but also extrapolate its future path to determine if a collision is imminent. This involves sophisticated algorithms that can model the motion of both the drone and the obstacle.
For example, a drone approaching a building needs to predict if its current trajectory will intersect with the building’s surface. The extrapolation here is crucial for safe operation:
- Predictive Collision Detection: The system extrapolates the drone’s path and the obstacle’s path. If these extrapolated paths are projected to intersect within a critical timeframe, a collision avoidance maneuver is triggered.
- Path Re-planning: Based on the extrapolated future state, the system can intelligently re-plan its route to circumvent the obstacle, often with minimal disruption to its overall mission.
Autonomous flight, especially in complex environments like urban settings or challenging natural terrain, is heavily reliant on the ability to accurately extrapolate sensor data, predict future states, and make informed decisions based on these predictions. This is the essence of “seeing” into the immediate future, a capability that allows drones to operate with increasing levels of independence and safety.
In essence, extrapolation in flight technology is not just about guessing what’s next; it’s about making informed, mathematically derived predictions that are critical for stability, navigation, safety, and autonomy. It’s a silent, constant partner in every stable flight, every precise maneuver, and every complex autonomous operation that defines the cutting edge of aerial technology.