In the rapidly evolving landscape of unmanned aerial vehicles (UAVs), the terminology of biology and the mechanics of engineering are increasingly intertwined. When we ask, “what does dominant mean in genetics,” we are typically looking for an answer within the realm of Mendelian inheritance—the idea that certain traits override others to define the physical characteristics of an organism. However, in the context of advanced drone technology and innovation, this biological principle serves as the foundational metaphor for “Genetic Algorithms” (GAs). In this technological niche, “dominance” refers to the superior parameters in a software string that allow a drone to fly further, navigate more accurately, and process data more efficiently.
As we push the boundaries of autonomous flight, mapping, and remote sensing, engineers are no longer manually coding every possible response to atmospheric turbulence or obstacle avoidance. Instead, they are utilizing evolutionary computing. By understanding how dominant traits are selected in a digital environment, we can better appreciate how the next generation of industrial and consumer drones is being “bred” for peak performance.
The Biological Blueprint of Modern Drone Intelligence
To understand how genetics applies to drone innovation, one must first look at the structure of a Genetic Algorithm. In biology, a genome is a complete set of instructions for building an organism. In drone tech, the “genome” is a set of parameters—numerical values defining motor speed, sensor sensitivity, tilt angles, and battery discharge rates.
Defining Dominance in Computational Evolution
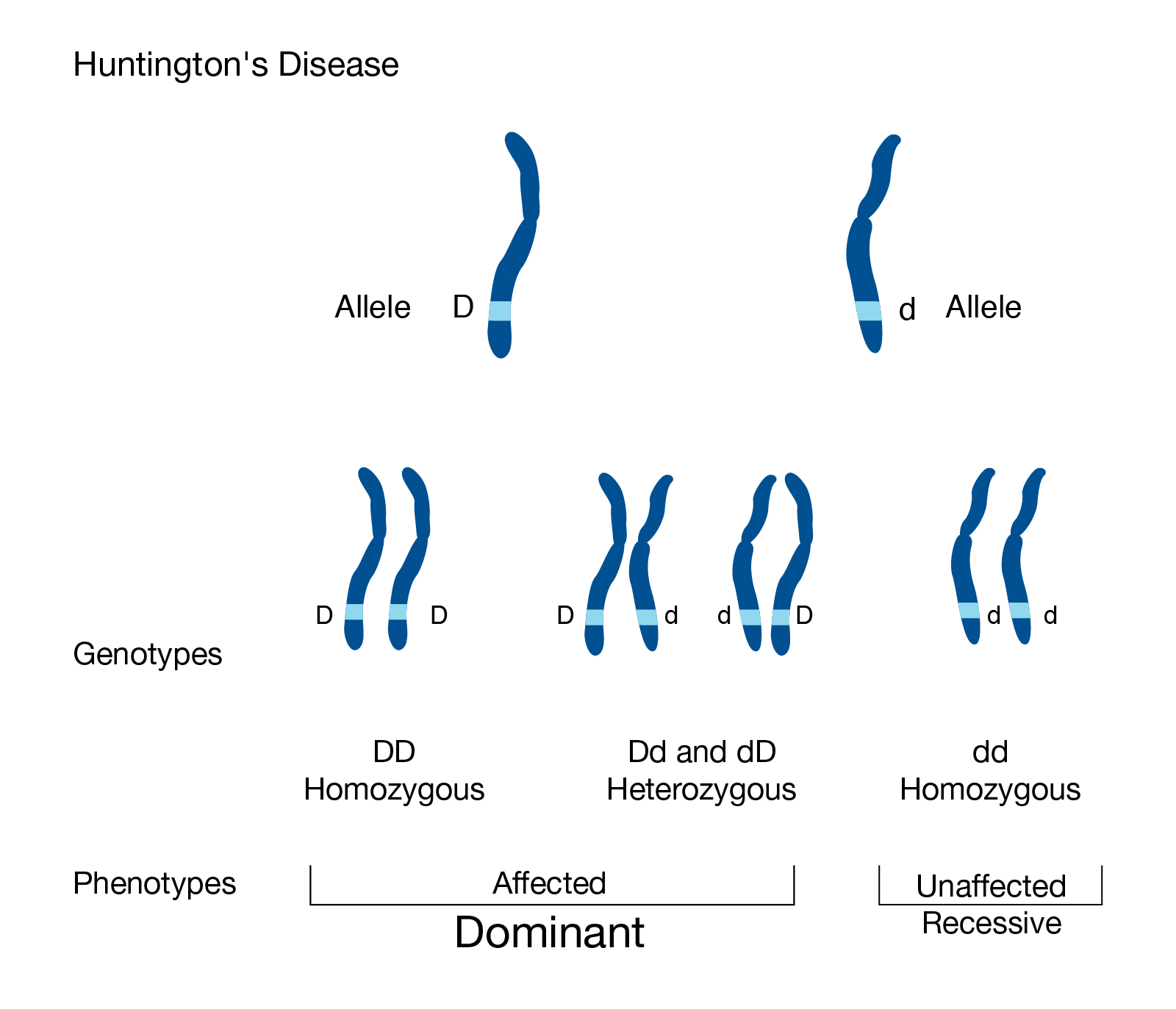
In classical genetics, a dominant allele is one that expresses its phenotype even when only one copy is present. In the world of drone simulation, “dominance” is observed during the selection phase of an algorithm. When developers run thousands of flight simulations simultaneously, certain “traits”—perhaps a specific way of banking into a wind gust—consistently result in a higher “fitness score.” These successful traits become dominant in the next generation of the drone’s flight controller software.
This process mirrors natural selection. If a drone’s software “mutates” to include a new way of processing LiDAR data that saves 5% of its battery life, that trait is deemed highly fit. In subsequent iterations of the code, that specific logic becomes dominant, masking or replacing the less efficient “recessive” legacy code.
The Role of Chromosomes in UAV Data Strings
In evolutionary robotics, we treat the drone’s operational logic as a series of chromosomes. Each “gene” within that chromosome controls a specific function, such as the PID (Proportional-Integral-Derivative) tuning for stabilization. By mimicking the way biological organisms pass on dominant traits, developers can allow the software to “evolve” toward an optimal state. This is particularly useful in Category 6 tech, such as AI Follow Mode and Autonomous Flight, where the variables are too complex for traditional linear programming.
Dominance and Recessiveness in Algorithmic Selection
The application of genetic principles to drones relies on three primary mechanisms: selection, crossover, and mutation. In this ecosystem, the concept of dominance determines which “digital DNA” survives to the next production cycle or software update.
Fitness Functions: The “Natural Selection” of Drone Software
A fitness function is the metric by which we measure a drone’s success. For a mapping drone, the fitness function might be the clarity of the photogrammetry or the precision of the GPS coordinates. When the algorithm identifies a set of parameters that produces a “dominant” result—meaning it outperforms all other variations—it prioritizes those parameters for the “parent” generation of the next software iteration.
If a particular sensor-fusion logic is “recessive”—meaning it only works under very specific, rare conditions—it may be phased out in favor of the more “dominant” logic that provides stability across a wide range of environments. This is how drones have transitioned from being difficult-to-fly hobbies to stable, autonomous tools for remote sensing.
Crossover and the Inheritance of Success
In genetics, crossover is the exchange of genetic material between two parents. In drone innovation, crossover occurs when two different high-performing flight algorithms are merged. For example, one algorithm might be dominant in high-altitude stability, while another is dominant in low-light obstacle avoidance. By “crossing” these two digital genomes, engineers create a new generation of software that inherits the dominant, superior traits of both. This leads to a multi-capable UAV that can maintain a steady hover at 400 feet while simultaneously navigating through a dense forest in the twilight.
Optimization Through Simulated Evolution: Drone Swarms and Pathfinding
One of the most exciting areas where genetic dominance plays a role is in the development of drone swarms and complex pathfinding. In these scenarios, the “genetics” of the swarm determine how individual units interact to achieve a collective goal, such as search and rescue or large-scale agricultural mapping.
Swarm Intelligence and Genetic Dominance
In a swarm, “dominance” isn’t about one drone leading the others, but about the dominant behavioral rules that govern the group. Through genetic algorithms, researchers can test millions of different behavioral rules. The rules that prevent collisions and maximize area coverage are identified as dominant. These rules are then hard-coded into the swarm’s collective intelligence.
If a rule is “recessive” or weak—such as a rule that causes drones to cluster too closely together—it is “selected against” in the simulation and eventually discarded. This iterative process ensures that the swarm behaves like a single, efficient organism, much like a flock of birds or a school of fish, where the “genetic” instructions for movement have been perfected over eons.
Pathfinding Optimization via Evolutionary Logic
Autonomous flight in complex environments requires the drone to make split-second decisions. Using the principles of genetic dominance, pathfinding algorithms can evolve to identify the most efficient route. Instead of simply moving from Point A to Point B, the drone’s “dominant” logic allows it to account for wind resistance, power consumption, and dynamic obstacles. By “breeding” the best paths in a simulated environment before the actual flight, the drone is equipped with a pre-evolved set of instructions that represent the pinnacle of efficiency.
Genetic Programming in Hardware Design and Aerodynamics
While most talk of “genetics” in drones refers to software, the concept of dominance is also revolutionizing hardware design, specifically in the realms of structural integrity and aerodynamics.
AI-Driven Design: Let the Algorithms Breed Better Frames
Generative design is a process where AI creates thousands of physical design variations based on specific constraints (weight, strength, thrust-to-weight ratio). In this context, the “dominant” physical traits are those that offer the most strength for the least amount of material. This often results in organic, bone-like structures for drone frames that a human engineer would never think to design. These “evolved” frames are more aerodynamic and resilient because they have been “selected” through millions of virtual stress tests, mimicking the way bones and shells evolve in the natural world.
Remote Sensing and the Adaptation of Machine Learning
Remote sensing is another area where “dominant” patterns are crucial. For a drone to identify a specific type of crop disease or a structural crack in a bridge, it uses machine learning models that have been trained through evolutionary processes. The “dominant” features in an image—the specific pixels that indicate a problem—are prioritized by the AI. Over time, the AI’s “genetic” code for image recognition becomes so refined that it can spot anomalies with a degree of accuracy that far surpasses human capability.
The Ethical and Technical Frontiers of Autonomous Evolution
As we continue to use the principles of dominance and genetics to innovate within the drone industry, we face new challenges. The “evolution” of these machines is happening at a pace that far outstrips biological evolution, leading to questions about the future of autonomous systems.
The Black Box Problem in Evolved Logic
One of the risks of using genetic algorithms to determine “dominant” traits in drones is the “Black Box” problem. Sometimes, an algorithm evolves a solution that is incredibly effective, but engineers don’t fully understand why it works. Because the “dominant” trait was selected through millions of iterations of digital trial and error, the logic can become so complex that it is no longer human-readable. Ensuring that these “evolved” drones remain safe and predictable is a major focus of current tech and innovation research.

Towards Truly Autonomous Innovation
The ultimate goal of applying genetic principles to drones is to create systems that can adapt in real-time. Imagine a drone that, when faced with a broken propeller or a failing sensor, can “mutate” its flight logic on the fly to compensate for the damage. By understanding what “dominant” means in a genetic and computational sense, we are moving toward a world where drones are not just tools, but adaptive systems capable of surviving and thriving in the most challenging environments on Earth—and beyond.
In conclusion, dominance in the context of drone genetics is about the survival of the fittest code, the most efficient hardware, and the smartest algorithms. By leveraging these biological concepts, the drone industry is ensuring that each new generation of UAVs is more capable, more resilient, and more autonomous than the last. The “genetics” of flight are no longer written in DNA, but in the silicon and software of the machines that are currently redefining our sky.